 康謀方案 ARXML 規則下 ECU 總線通訊與 ADTF 測試方案
康謀方案 ARXML 規則下 ECU 總線通訊與 ADTF 測試方案

??01 引言
隨著汽車新四化“電動化、網聯化、智能化、共享化”全面推進,幾乎每一項新技術的誕生都離不開汽車電子的身影。其中,電子控制單元(Electronic Control Unit,ECU)作為汽車電子控制系統的核心。與傳統ECU相比,采用AUTOSAR(AUTomotive Open System ARchitecture,汽車開放系統架構)這種分層架構,極大降低了汽車嵌入式系統軟、硬件耦合度。
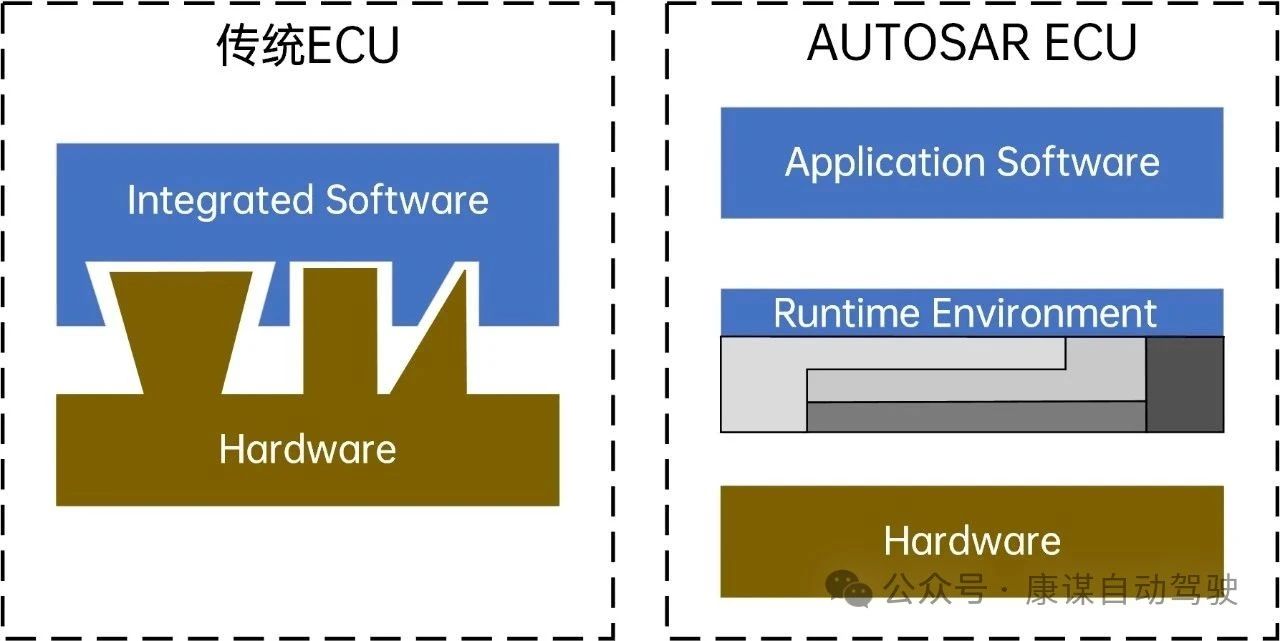 圖1 傳統軟件架構與AUTOSAR架構對比
圖1 傳統軟件架構與AUTOSAR架構對比
此外,隨著國內新能源汽車相關控制器正向開發需求的增長,AUTOSAR規范越來越受到大家的關注,并且應用需求也越來越大。國內一些主流整車廠以及零部件供應商都開始致力于符合AUTOSAR規范的車用控制器軟件開發。
02 汽車電子控制系統
汽車電子控制系統由傳感器(Sensor)、電子控制單元(Electronic Control Unit,ECU)和執行器(Actuator)組成。
 圖2 汽車電子控制系統基本構成
圖2 汽車電子控制系統基本構成
傳感器作為信號輸入裝置,用來檢測和采集各種信息,如溫度、壓力、轉速等,可以將非電量信號轉換為電信號傳給電子控制單元。
ECU即汽車嵌入式系統(Automotive Embedded System,AES),ECU對傳感器的信號進行處理,通過控制算法向執行器發出控制指令。硬件部分主要由微控制器(Microcontroller,MCU)及外圍電路組成;軟件部分主要包括硬件抽象層(Hardware Abstraction Layer,HAL)、嵌入式操作系統及底層軟件和應用軟件層。
執行器為執行某種控制功能的裝置,用于接收來自ECU的控制指令,并對控制對象實施相應的操作。
03 ECU開發流程中總線通訊
ARXML 規則下的標準化協作
ECU 實際開發流程中,從需求分析與定義到系統集成測試,總線通訊貫穿始終。
比如在需求分析與定義階段,開發團隊首先要梳理整車功能需求,明確各 ECU 需要實現的功能及彼此間的數據交互需求。
基于這些需求,工程師使用ARXML(AUTOSAR Extensible Markup Language)文件定義 ECU 間的通訊協議,包括選擇 CAN、Flexray 還是 SOME/IP 總線,以及詳細規劃報文結構、信號編碼等內容。
以CAN 總線為例,ARXML 文件中會明確 CAN 報文的 ID、數據長度、信號位置及編碼方式等信息。開發人員依據這些規范進行代碼實現,確保各個 ECU 在 CAN 總線上準確收發數據。
在集成測試階段,ARXML 文件提供的標準化描述,能幫助測試人員快速搭建測試用例,驗證 ECU 間的通訊邏輯是否符合預期。比如,通過對比ARXML 定義的信號與實際總線上抓取的數據,精準定位通訊異常問題,極大提升開發效率與系統穩定性。
ADTF作為一款專業的汽車數據與時間觸發框架軟件,是一個基于層級和面向服務的系統架構。
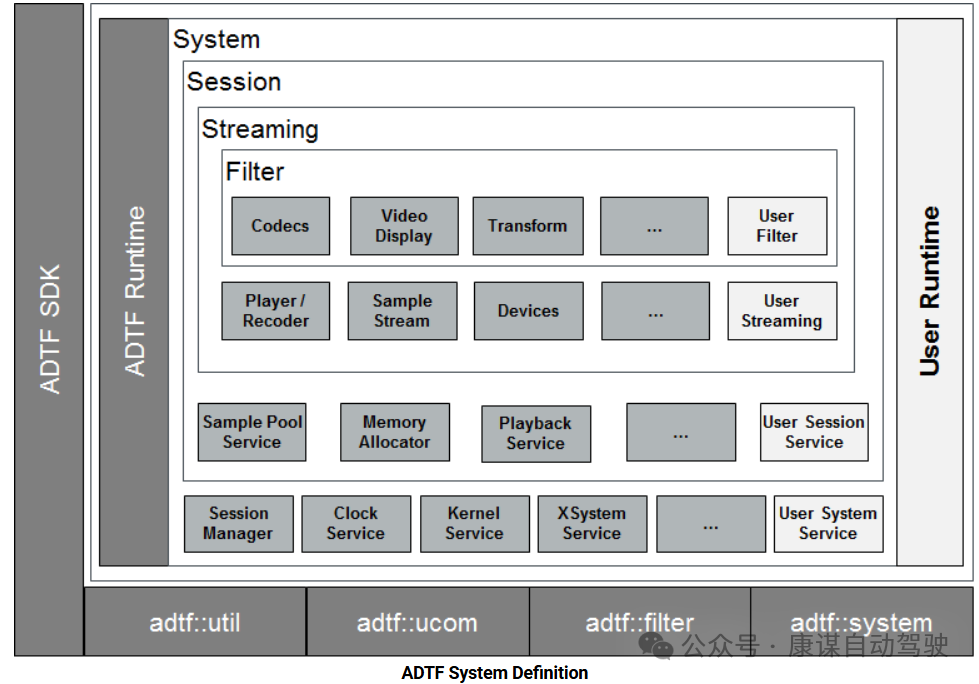 圖3 ADTF 系統架構
圖3 ADTF 系統架構
大家也可以看出來,ADTF同樣采用模塊化的設計,與AUOSAR CP 架構層級設計有異曲同工之妙。
基于Runtime來封裝底層服務,通過插件開發可以生成各類工具箱,完成ECU開發中各類測試任務。比如在總線類數據的解析與測試領域有著卓越表現。它具備十分強大的多總線數據處理能力,比如adtf_car_communication_toolbox、adtf_device_toolbox。能夠無縫接入 CAN、Flexray、SOME/IP 等多種汽車總線,并基于 ARXML 規則對總線數據進行解析。
05 應用案例
在ADTF Car Communication Toolbox中,基于 AUTOSAR ARXML 文件對汽車總線通信數據進行解碼,實現了CAN、FlexRay 和 SOME/IP 等總線協議的解析。
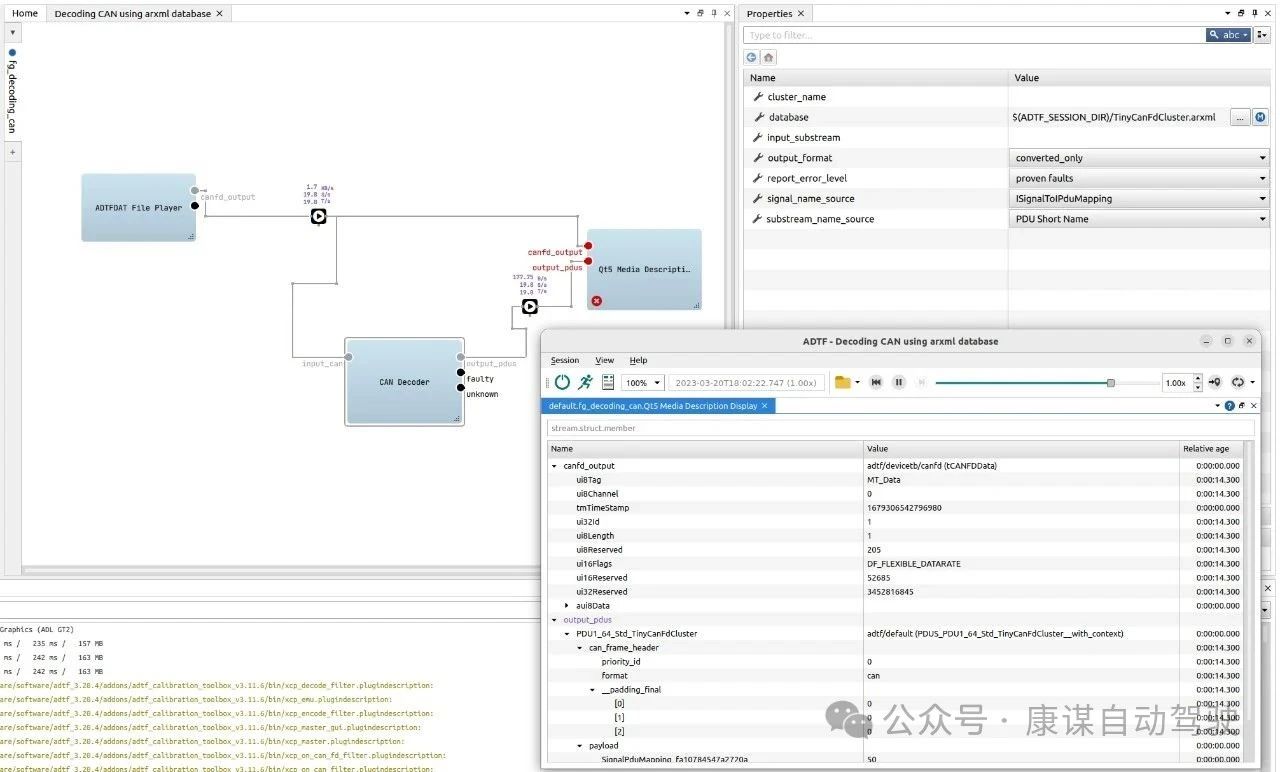 圖4 Decoding CAN using arxml database
圖4 Decoding CAN using arxml database
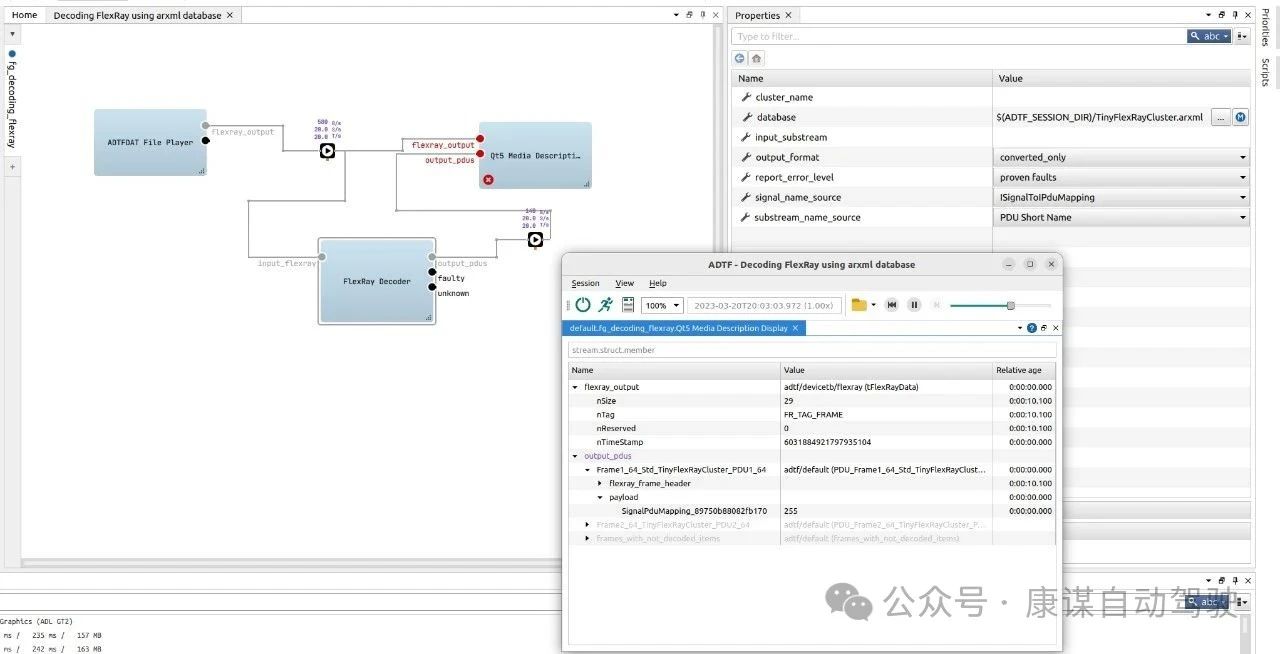 圖5 Decoding FlexRay using arxml database
圖5 Decoding FlexRay using arxml database
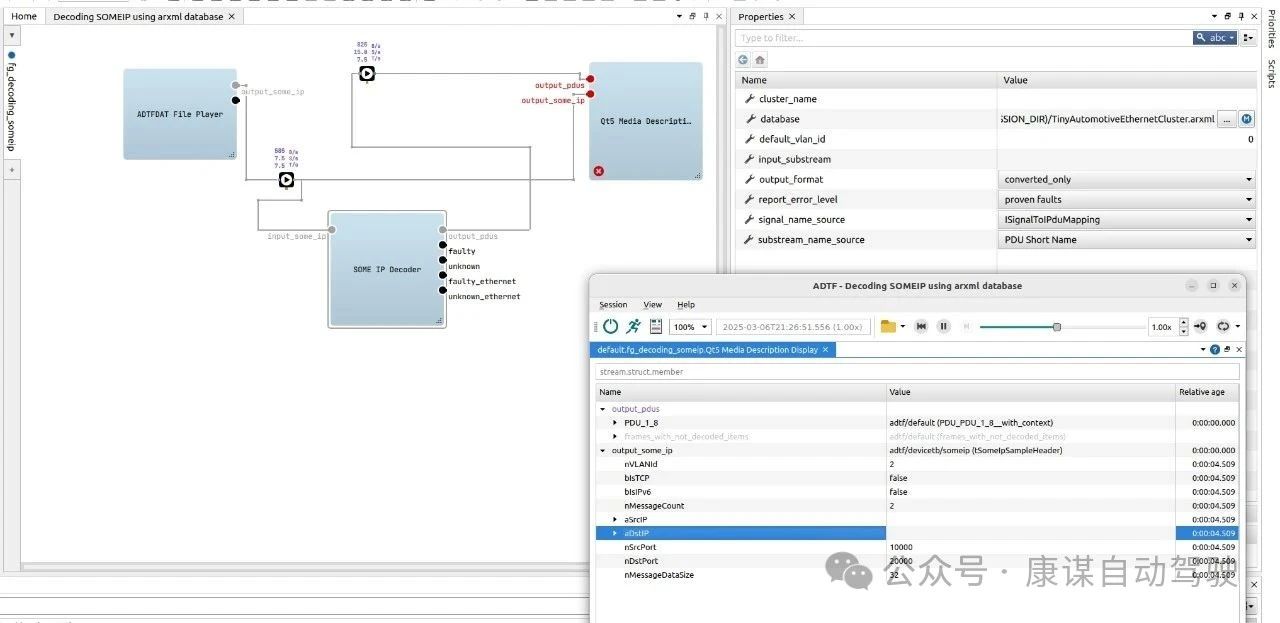 圖6 Decoding SOMEIP using arxml database
圖6 Decoding SOMEIP using arxml database
該工具包通過集成 ARXML 解析能力,使 ADTF 具備汽車總線通信的解碼功能,適用于車載網絡開發、測試與分析場景,幫助工程師將原始總線數據轉換為可理解的信號流,提升汽車電子系統的開發效率。
06 結語
在汽車電子技術飛速發展的當下,基于 ARXML 規則的總線通訊標準化與高效解析能夠加快ECU開發流程。
ADTF具備多總線數據解析與測試能力,結合ARXML 規則,為 CAN、Flexray、SOME/IP 等總線數據處理提供測試解決方案。
無論是ECU 開發過程中的協議驗證,還是整車集成測試中的問題定位,ADTF都能快速部署完成測試開發。
如果你對 ADTF 的具體應用或 ARXML 規則有更多疑問,歡迎交流,共同探索汽車電子技術的未來。????
審核編輯 黃宇
-
ecu
+關注
關注
14文章
990瀏覽量
57436 -
總線通訊
+關注
關注
0文章
26瀏覽量
11158
發布評論請先 登錄
軟件在環(SIL)測試方案及康謀aiSim實現路徑

圓滿收官!康謀aiSim亮相北汽 - 蓋世供應鏈技術共創交流日

康謀新聞 | 康謀與Coppelia Robotics正式建立合作伙伴關系!
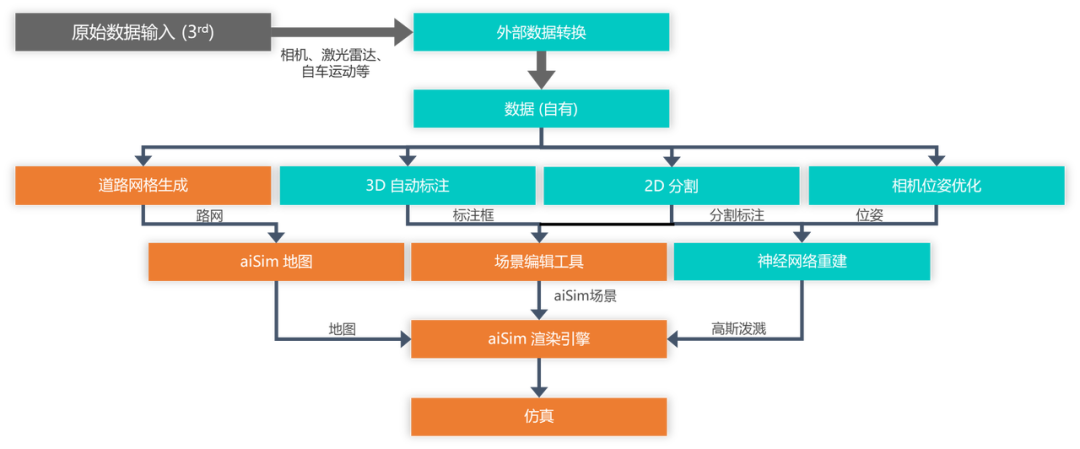
自動駕駛場景生成方法及優選方案:康謀aiSim 3DGS方案重塑行業標準
康謀直播| 汽車多總線數據采集與分析:方案搭建與應用
康謀直播Q A | 康謀智駕仿真測試,共筑智駕安全的「信任密碼」!
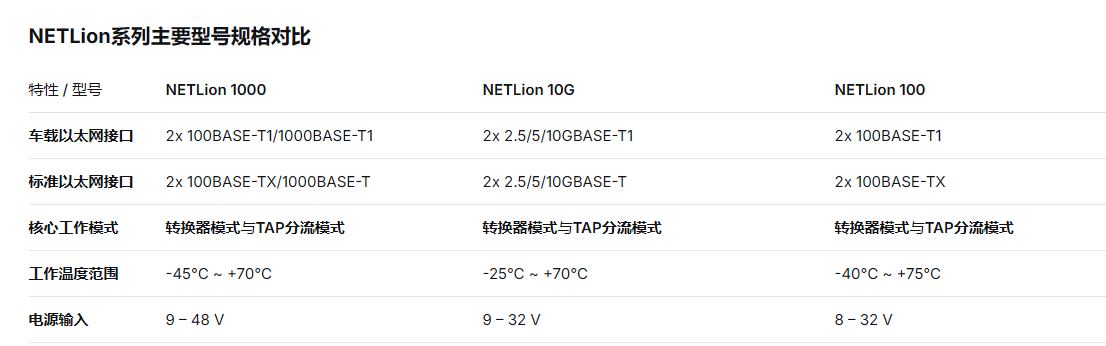
車載以太網轉換器怎么選?康謀 NETLion 系列:多場景適配、高性價比之選
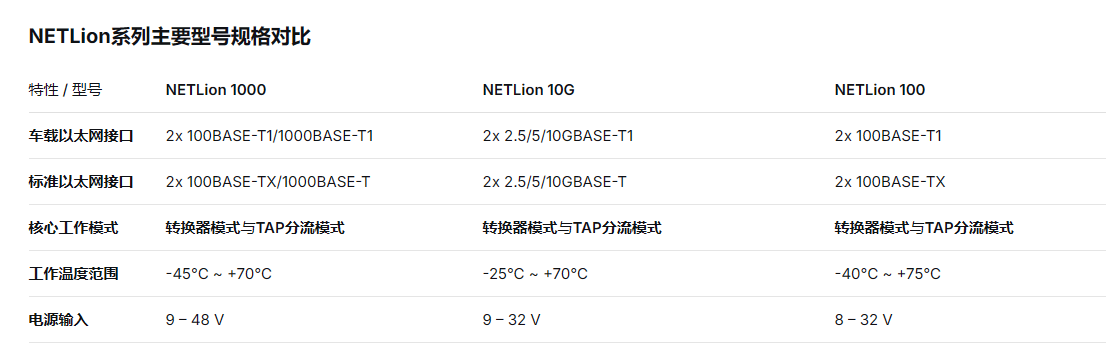
車載以太網轉換器:專業選擇指南與康謀NETLion系列深度解析
深度解析:康謀雙模態仿真測試解決方案!
自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
康謀 aiSim 攜經緯恒潤煥新 HIL 測試,誠邀集成商共建生態!
康謀新聞 | 康謀與Robotec.ai正式建立合作伙伴關系!
康謀新聞 | 康謀加入ASAM組織,全球首個ASIL-D認證自動駕駛仿真平臺aiSim引領安全新標桿

康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領安全新標桿
方案分享 | ARXML 規則下 ECU 總線通訊與 ADTF 測試方案



 工商網監
工商網監
評論