 智駕仿真測試實戰之-"虛實融合:ViL功能測試"
智駕仿真測試實戰之-"虛實融合:ViL功能測試"

作者 |潘
小編 |不吃豬頭肉

引言
隨著L2及L2+級智能輔助駕駛技術的普及,車輛在復雜場景下的可靠性成為用戶最關心的問題。但傳統實車測試成本高、周期長、危險性大!那么如何低成本完成L2+級智能駕駛系統的功能驗證呢?車輛在環(ViL, Vehicle-in-the-Loop)場地測試方案通過高精度地圖搭建、多傳感器仿真技術,解決實車測試極端工況危險、故障難以模擬及HiL測試精度不足等問題。下面重點介紹ViL測試系統的方案架構及實現方式。

方案架構
如圖1所示,北匯提供的智駕場地ViL測試系統由以下5大部分組成: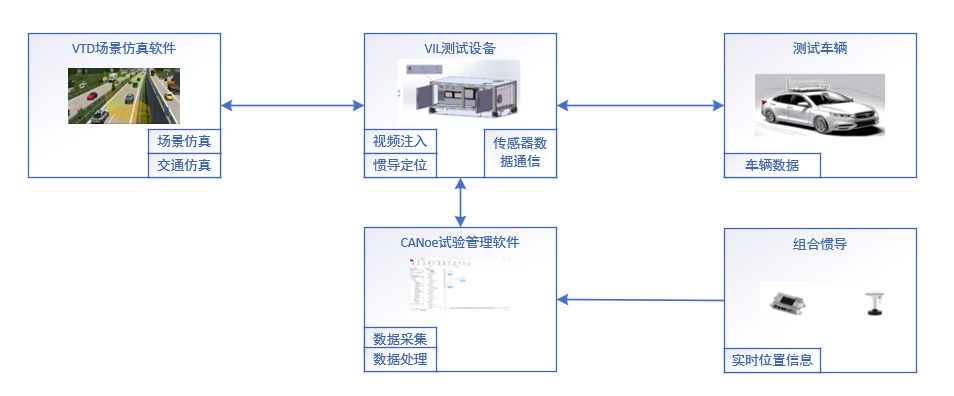 圖 1 ViL測試整體框架
圖 1 ViL測試整體框架
場景仿真軟件
智駕場地ViL測試系統中使用真實車輛,但傳感器所有的數據來源于仿真場景,采用VTD作為3D虛擬場景仿真軟件,為被測ECU提供測試仿真場景和傳感器數據。
試驗管理軟件
實車上的雷達傳感器、骨干網及VTD虛擬仿真場景數據都會在CANoe軟件上管理,實現數據監測、采集、轉發及篡改。
ViL測試設備
固定在被測車輛后備箱,主要包含總線測試資源設備、傳感器仿真設備及車載供電電源3部分:總線測試資源設備:總線數據的采集、轉發與VTD仿真場景數據的解析需要硬件來完成傳輸,如VN16XX系列硬件實現CAN仿真通信,VN56XX系列硬件實現車載以太網仿真通信。傳感器仿真設備:系統中仿真的傳感器包含攝像頭、毫米波雷達及超聲波雷達等。攝像頭采用視頻注入板卡完成各類攝像頭仿真;毫米波雷達通過VTD軟件仿真及采集真實雷達做數據轉發篡改;DSI3模擬器用于超聲波仿真信號轉換。車載供電系統:車載供電系統主要對總線資源設備、傳感器仿真設備進行供電,使其正常工作。
組合慣導
一方面仿真場景自車位置與真實車輛位置重合,依賴于組合慣導。另一方面將組合慣導實時數據發送給VTD軟件,用于虛擬場景自車位置定位。
測試車輛
在ViL場地功能測試中,被測車輛為真實車輛,功能激活時智駕控制器輸出的控制指令直接給到真實車輛的執行機構響應,完成加減速及轉向動作,而不經過虛擬車輛動力學模型。

仿真場景搭建與車輛映射
真實道路場景地圖搭建可分為如下三個步驟:組合慣導數據采集、虛實車輛坐標轉換及VTD場景道路搭建。首先獲取道路的經緯度數據,以此為基礎搭建靜態道路與動態場景。地圖數據來源于組合慣導系統,CANoe軟件實時采集慣導發出的經緯度坐標、航向角等信息并保存。其次,慣導采集的車輛位置與VTD中的車輛位置坐標系不同,還需完成坐標的轉換,以保證真實車輛映射在虛擬場景中。最后是靜態道路的搭建,完成了坐標轉化后,VTD將轉換后的OpenDrive坐標點位數據導入自動生成Road,接著在Road上就可以自定義搭建車道了。導入生成的Road見圖2。
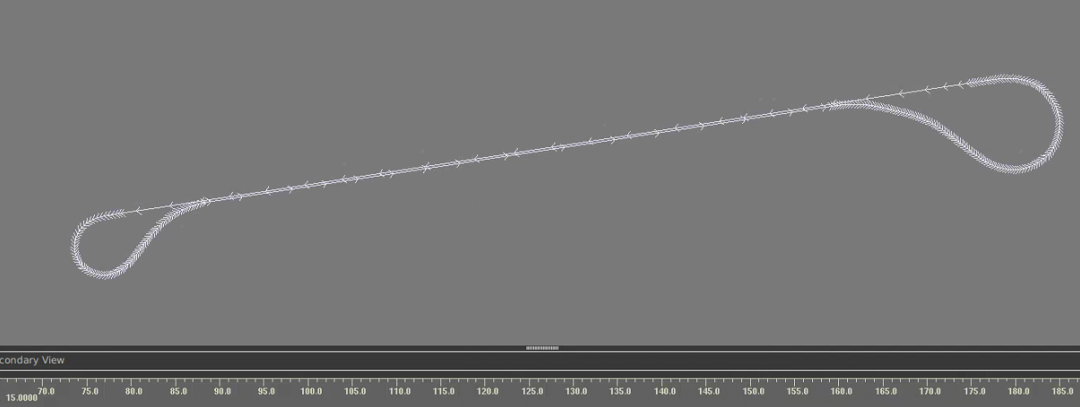
圖 2 道路地圖模型
虛擬道路搭建完成了,如何保證實車所在位置和虛擬場景匹配呢?
車輛位置映射必須確保VTD中的虛擬主車與真實車輛的位置、姿態完全同步,否則會導致測試場景錯位。北匯采用的方法如下:
CANoe實時采集車輛位置、IMU姿態、車輛運動狀態。這些信息共同發送到VTD軟件,用于VTD自車控制, VTD的API接收CANoe發送的位置與姿態信息映射在仿真場景中。圖3為真實場景在仿真場景中的位置映射。
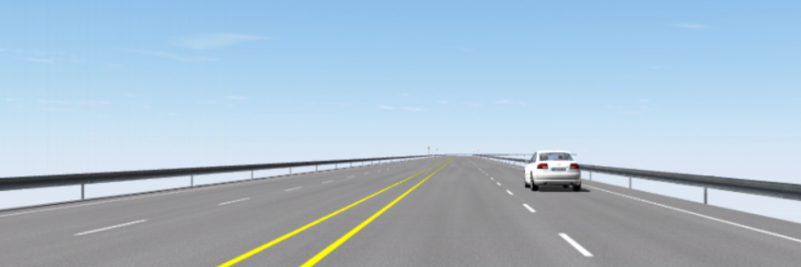

圖 3 虛擬、真實場景位置映射

動態交通參與者仿真
在靜態場景映射完成后,還需要完成交通參與者的動態行為,如前方車輛切入/切出動態軌跡,目標車加減速動作及行人鬼探頭場景,可通過VTD實時設置行駛軌跡,通過腳本或觸發器(時間/事件觸發)進行動態行為邏輯觸發,從而完成目標交通參與者到實際ViL場地的映射,豐富單一場地測試的動態場景。如上圖3所示,在實際AEB功能ViL場地測試時,將VTD仿真中的虛擬目標車輛映射到真實道路中,通過真實雷達/仿真雷達感知注入目標參與者(相對距離、速度、目標類型及ID等)信息至智駕被測控制器,從而在場景虛擬目標車及實際場地道路結合的場景下測試AEB功能,極大降低實際場地中AEB未能觸發及未及時制動導致的碰撞安全風險。

行車傳感器仿真
完成車輛映射匹配和場景構建后,接下來即可進行傳感器仿真及功能測試了。行車功能測試用到攝像頭與毫米波雷達兩種傳感器,其源數據都來自VTD仿真場景,渲染畫面用于前視注入,VTD中配置前毫米波雷達、角毫米波雷達輸出參數。下面介紹兩種傳感器的仿真方法。
5.1前視攝像頭仿真
按照真實攝像頭參數在VTD中配置鏡頭畸變模型及安裝位置,這樣渲染出來的圖像較接近于真實攝像頭視覺的感知,此外VTD還支持渲染多種類型圖像和模擬不同天氣,如雨霧天氣等;渲染特殊材質處理反光標識牌,潮濕路面等,極大豐富了測試場景。天氣模擬如圖4所示。
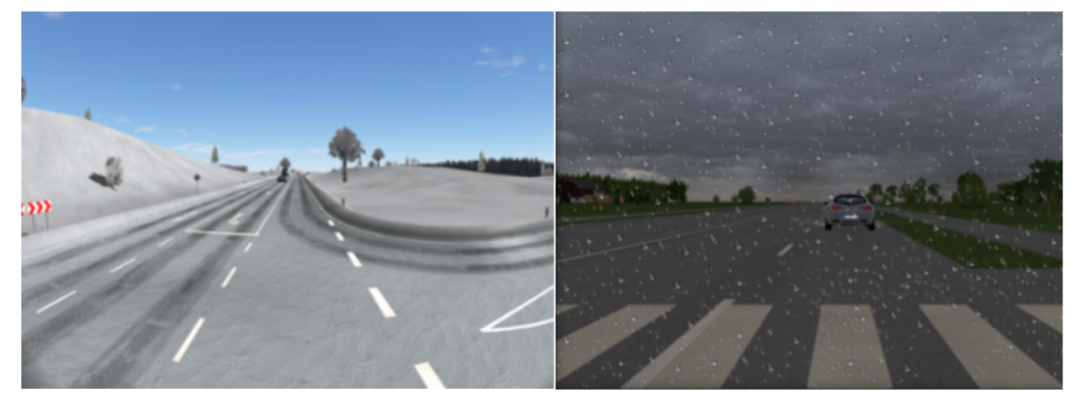
圖 4 多種天氣渲染
VTD渲染的視頻流通過北匯定制視頻注入板卡實時注入被測ECU,完成前視攝像頭仿真,注入鏈路如圖5所示。
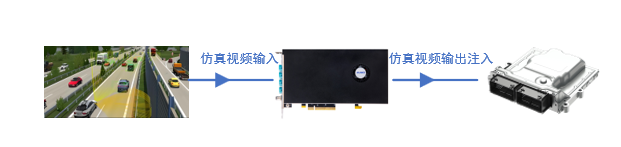
圖 5 視頻注入鏈路
5.2毫米波雷達仿真
針對毫米波雷達,控制器接收的數據常見為目標列表,可采用報文轉發與篡改真實報文數據來處理雷達信號。分為以下兩個步驟,如圖6所示。
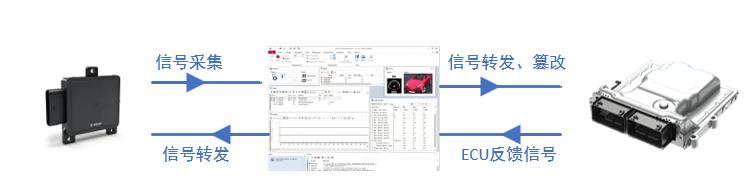
圖 6 毫米波雷達仿真鏈路
信號采集:通過CANoe總線分析工具進行信號采集、轉發實際車輛上真實毫米波雷達發出的報文數據至被測控制器。而目標列表相關報文不能直接轉發,還需要篡改處理,此時需將實車信號替換為從VTD軟件解析到的目標數據。信號反饋:對于被測控制器,轉發其發送報文至真實雷達,真實雷達才會才會正常工作,從而持續反饋報文。這種方法較為簡單,方便完成雷達信號的轉發、篡改,不需要仿真所有雷達信號,能極大簡化工程開發等。同時也可虛實報文結合,用于ViL功能安全通信層級的故障注入構建。

泊車傳感器仿真
功能測試的另一類為泊車功能測試,在泊車測試中用到了環視攝像頭與超聲波雷達傳感器,環視提供前后左右四個方向的視覺感知,超聲波提供距離探測,兩者共同為泊車提供感知信息。下面描述如何在實車中注入VTD軟件中的兩種傳感器數據。6.1環視攝像頭仿真
環視仿真與前視相似,但與前視不同的是,內外參設置好后,環視會考慮到四面的拼接效果,因此需采集實車的標定數據完成標定。圖7為環視拼接后在車機大屏上面的顯示效果。

圖 7 環視拼接效果圖
6.2超聲波雷達仿真系統
泊車過程中預警功能需要超聲波傳感器的數據,其源數據來自VTD虛擬場景,所以需要配置正確的超聲波模型參數,再由超聲波模型輸出探測距離。CANoe接收超聲波模型輸出的探測距離,發送數據至DSI3模擬器,在此模擬器中數據轉化為DSI3信號,最終將信號發送給被測控制器做感知。

圖 8超聲波仿真數據鏈路

總結
虛實場景結合的ViL功能測試需考慮場景的構建、虛擬動態場景結合真實道路、以此豐富場景的功能測試;同時虛實車輛映射及傳感器的仿真,可確保虛實車輛定位位姿一致,正確的傳感器仿真數據注入才能在ViL測試環境中激活并觸發功能。北匯信息在智能駕駛MiL/SiL/HiL/ViL測試中擁有諸多成功的方案與實施經驗,在持續的項目開發與測試中,北匯信息也致力于新方案的技術驗證與實施,為中國智能網聯汽車發展貢獻自己的力量。如果您關注場地/實驗室ViL功能及功能安全測試。歡迎聯系我們,我們會給您提供專業的解決方案!
-
智能駕駛
+關注
關注
5文章
3008瀏覽量
51280 -
仿真測試
+關注
關注
0文章
115瀏覽量
11792 -
輔助駕駛
+關注
關注
1文章
416瀏覽量
15807
發布評論請先 登錄
R&S FSL6臺式信號分析儀的功能特點及應用范圍
"STM32F0 Error: Flash Download failed - ""Cortex-M0""解決"

A2B車載音頻總線-車機音頻&amp;amp;麥克風陣列測試
如何區分Java中的&amp;和&amp;&amp;
HarmonyOS &amp;amp;amp;潤和HiSpark 實戰開發,“碼”上評選活動,邀您來賽!!!

芯片工藝的&quot;7nm&quot; 、&quot;5nm&quot;到底指什么?
R&amp;S推出新的W和D頻段射頻專用測試解決方案
R&amp;S針對FMCW雷達推出超短距離模擬功能
R&amp;S攜手Skylo Technologies增強非地面網絡(NTN)測試服務
北美運營商AT&amp;amp;T認證的測試內容有哪些?

北美運營商AT&amp;amp;T認證中的VoLTE測試項

如何判斷產品需不需要做AT&amp;amp;T認證?AT&amp;amp;T測試內容和要求分享
倉儲界的&quot;速效救心丸&quot;,Ethercat轉PROFINET網關實戰案例

選EtherCAT模塊,別只看價格,先看&amp;quot;體檢報告&amp;quot;




 工商網監
工商網監
評論