") BLDC無感控制與有感控制
BLDC無感控制與有感控制

致力于成為無刷馬達驅(qū)動行業(yè)的“小巨人”,為智能制造提供高性價比解決方案。——深圳其利天下
BLDC進行梯形波控制時,需要檢測轉(zhuǎn)子磁極位置,根據(jù)檢測的位置定子線圈進行換相通電,形成6步的旋轉(zhuǎn)磁場,進而帶動轉(zhuǎn)子同步轉(zhuǎn)動的控制方式。而檢測轉(zhuǎn)子磁極位置又可分為電機帶霍爾傳感器(有感)以及不帶霍爾傳感器方法,檢測轉(zhuǎn)子磁極位置的方法不同,會直接BLDC控制模式不同。
BLDC有感控制01
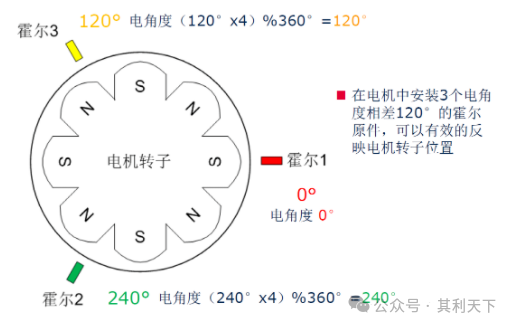
對于BLDC有感控制,要求BLDC電機本身裝有霍爾傳感器,電機霍爾傳感器安裝時需要相差120°,如上圖所示。
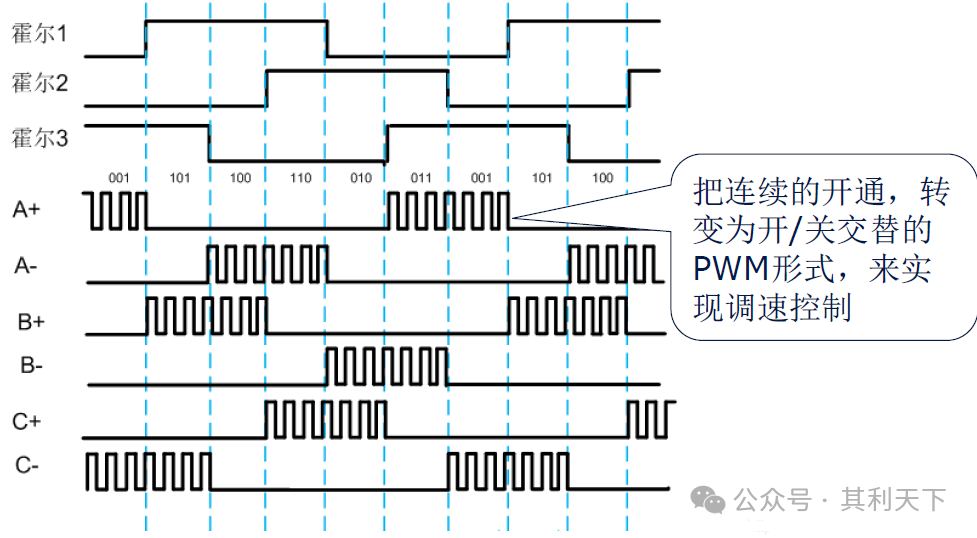
電機按一定方向轉(zhuǎn)動時,3個霍爾的輸出會按照6步的規(guī)律變化如下:
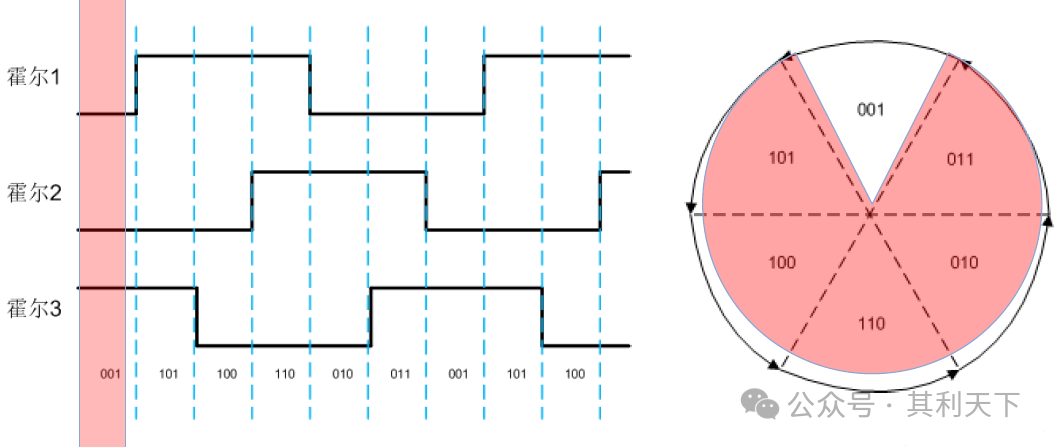
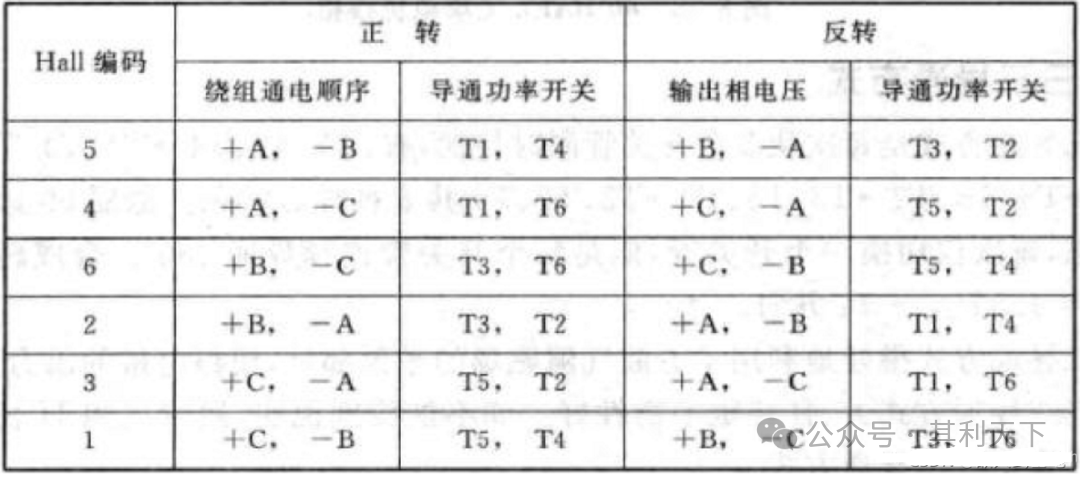
根據(jù)霍爾傳感器位置,進而按照一定規(guī)律給三相繞組通電,從而來實現(xiàn)電機的控制。考慮到每個電機霍爾傳感器安裝方式不同,換相開關(guān)表會有一定的區(qū)別。具體可以根據(jù)廠商提供的資料或?qū)崪y電機霍爾輸出來確定關(guān)系。
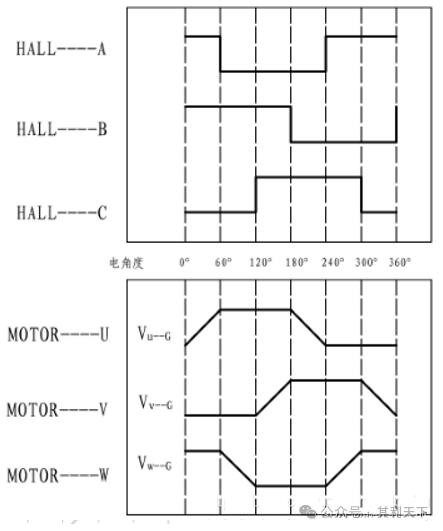
如下為一種電機的霍爾輸出與反電動勢輸出示意,可知在電機霍爾A輸出由1變?yōu)?時,控制U+開通。
BLDC有感控制系統(tǒng)如下:
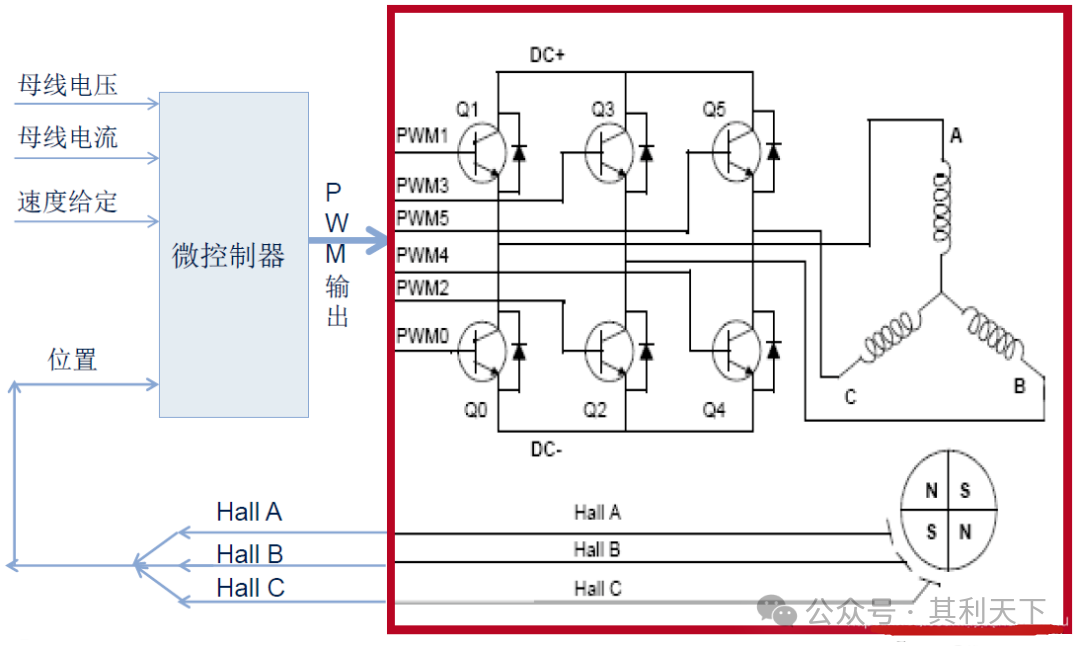
BLDC速度控制
在BLDC電子換相的基礎(chǔ)上,通過更改導(dǎo)通時PWM占空比即可改變等效的輸出電壓, 從而更改來實現(xiàn)調(diào)速。
BLDC無感控制02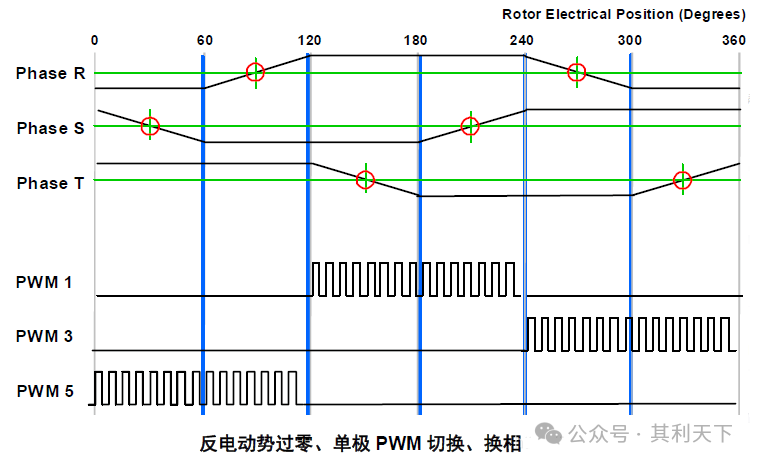
BLDC使用霍爾傳感器時,存在以下問題:HALL的安裝條件受到限制、Hall影響系統(tǒng)可靠性(Hall易損壞,需要檢修)、Hall對安裝精度有要求、有一定成本。因此有必要研究BLDC的無感控制方法。
BLDC 無傳感器控制的主要任務(wù)就是對轉(zhuǎn)子位置進行估計。兩種基本技術(shù)如下:
基于反電動勢感應(yīng)的技術(shù):基于反電動勢過零來進行換相;要求反電動勢足夠高,速度范圍在額定轉(zhuǎn)速的5-10%至100%。
基于電機電感凸極的技術(shù):基于瞬態(tài)電流測量;速度范圍為靜止至標稱速度的約20%。
常用的是基于反電動勢過零檢測的方法,但這要求電機有一定速度;有時候會結(jié)合使用,但需要使用復(fù)雜的控制算法。下面主要對基于反電動勢感應(yīng)的技術(shù)進行介紹。
正確換相的電機相繞組電壓波形與反電動勢波形如圖所示。從圖中可得到正確的換相點應(yīng)在過零點延遲30°。因此,反電動勢過零信號可以用作估計正確換相時間點的計算依據(jù)。
-
電機
+關(guān)注
關(guān)注
143文章
9645瀏覽量
154435 -
控制
+關(guān)注
關(guān)注
5文章
1035瀏覽量
125363 -
BLDC
+關(guān)注
關(guān)注
219文章
935瀏覽量
100495
發(fā)布評論請先 登錄
BLDC的無感控制方法
BLDC的無感控制方法

請問bldc無感控制如何使用timer1的com事件?
STM32F103做主控自制無刷電機(BLDC)控制器(有感/無感)
無刷直流電機驅(qū)動器開源設(shè)計(有感和無感),包含程序、原理圖等資料
如何使用Arduino開發(fā)板和ESC控制無感BLDC外轉(zhuǎn)子電機的速度
關(guān)于方波有感控制BLDC的學習記錄
笙泉BLDC MCU: 應(yīng)用于FOC無感控制
"diy無感無刷電機霍爾安裝_51 MCU,BLDC有感無感全開源,輕松實踐直流無刷電機控制(程序+電路詳解)..."

虹科免拆案例 | 淺談無感BLDC啟動控制方法




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論