 深度解析:IMU陀螺儀芯片從6軸到9軸陀螺儀傳感器融合的技術革新
深度解析:IMU陀螺儀芯片從6軸到9軸陀螺儀傳感器融合的技術革新

在便攜式系統的快速發展中,精準確定設備的位置和移動狀態已成為一項標準功能。手機、平板電腦等系統通過加速度計和磁力計提供的6軸數據,成功激活了一系列關鍵功能,顯著提升了消費類電子設備的界面友好性。
然而,隨著技術的不斷進步,下一代設備正邁向采用陀螺儀功能的9軸傳感器融合時代,以期為用戶帶來更為卓越的體驗。以健康監視器為例,當設備能夠精確區分步行、游泳和跑步等多種活動時,它便能更精準地追蹤用戶的生活狀態。此外,陀螺儀數據還催生了諸如手勢識別等新型界面功能,用戶只需輕輕揮動手腕,便能輕松展示所需信息。
這一技術革新不僅豐富了設備的功能,更在提升用戶體驗方面發揮了重要作用。隨著9軸傳感器融合技術的深入應用,我們有理由相信,未來的便攜式系統將為用戶帶來更為便捷、智能和個性化的服務。
眾多消費類電子設備,如手機、游戲系統、健康監視器和可穿戴設備等,均可從9軸傳感器融合技術中獲益匪淺。這一技術為設備賦予了高附加值功能,如三維手勢識別、相對定位以及精準的運動跟蹤,從而極大地提升了用戶體驗。
然而,值得注意的是,這些設備并不要求戰斗機保持飛行那樣的極高精確度。相反,它們需要的是一種既經濟又高效的9軸傳感器融合實施方案,以滿足消費者應用程序的需求,進一步優化用戶體驗。
如今,隨著新型傳感器的出現,如 PNISENtral M&M運動定向跟蹤模塊13759,, 開發人員使用LSM330+RM3100(磁傳感器) 實現9軸輸出的等效效果(加速度計+磁力計+陀螺儀),同時能耗降低了高達90%。這種技術的核心在于傳感器融合,它利用多個傳感器之間的互補性,填補單一傳感器的盲點,從而提供更全面、準確的數據。
9軸傳感器融合技術通過將加速度計、磁力計和陀螺儀的數據融合,使系統能夠精,確地定位自身在三維空間中的位置、傾斜和方向,以及監測位置和旋轉的變化。這種技術的有效應用,不僅提高了設備的性能,更為消費類電子設備帶來了無限的創新可能。
加速度計:感知運動與方向的關鍵
加速度計是一種能夠測量三個軸上加速度的傳感器。值得注意的是,靜止的物體同樣會受到重力的影響,因此會產生向下的加速度,這使得加速度計能夠判斷系統相對于“向下”的方向。這一特性不僅幫助系統確定其水平狀態,還廣泛應用于手持和便攜式設備中,用于調整顯示方向,以匹配用戶的握持方式。無論是手機、平板還是筆記本電腦,這一功能都極大地提升了用戶的使用體驗。
加速度計的另一大優勢在于其能夠檢測設備的掉落狀態。例如,當筆記本電腦放置在桌面上時,它會檢測到正常的重力加速度。但一旦筆記本電腦從桌面跌落,加速度計便能迅速捕捉到加速度的變化,從而判斷設備是否處于危險狀態。這一功能在防止硬盤驅動器損壞和數據丟失方面發揮著至關重要的作用。
此外,加速度計在節能方面也有著不俗的表現。對于長時間未動的健身追蹤器等設備,加速度計能夠檢測到這種靜態狀態,進而觸發設備的自動關機功能,從而顯著延長電池壽命。
磁力計:定位磁北的得力助手
磁力計是一種能夠測量磁場強度和方向的傳感器。它常被應用于電子指南針中,通過分析檢測到的磁場信息來確定磁北的方向。然而,磁力計作為獨立傳感器使用時,往往難以準確識別磁北。這是因為磁力計需要精確的校準和穩定的環境來確保測量結果的準確性。
在手持設備中,磁力計通常與加速度計配合使用,以提高定位精度。加速度計能夠檢測設備的傾斜角度,從而為磁力計提供必要的補充信息,使其能夠更準確地確定磁北方向。
陀螺儀:彌補加速度計的盲點
雖然加速度計能夠感知到設備的靜態狀態,但當設備以加速度計為旋轉中心進行旋轉時,加速度計卻無法檢測到這種運動。這正是加速度計的盲點所在。而陀螺儀則能夠彌補這一不足,它能夠檢測到設備的旋轉運動,為系統提供更為全面的運動信息。
然而,陀螺儀的引入也帶來了一系列挑戰。在三種類型的傳感器中,陀螺儀往往是體積最大、成本最高的。盡管它提供了寶貴的數據,但其高昂的價格、較大的體積以及較高的功耗往往使得開發者在權衡利弊時猶豫不決。因此,在許多應用中,開發者不得不將位置和方向功能限制在由加速度計和磁力計提供的6軸數據范圍內。
綜上所述,加速度計、磁力計和陀螺儀各自具有獨特的功能和優勢,它們共同構成了現代消費類電子設備的核心感知系統。隨著技術的不斷進步和成本的降低,我們有理由相信,未來的設備將能夠更加精準地感知運動和方向,為用戶帶來更為豐富和便捷的體驗。
如今,軟件算法和低噪聲,低延遲傳感器的進步使得僅使用加速度計和磁力計的數據來模擬陀螺儀輸出成為可能。這是中使用的方法,其中系統根據對設備先前位置的了解來計算設備的旋轉方向和速度。換句話說,當系統可以隨時間跟蹤方向時,它可以推斷旋轉數據。
應用:無人機、直升機和飛機
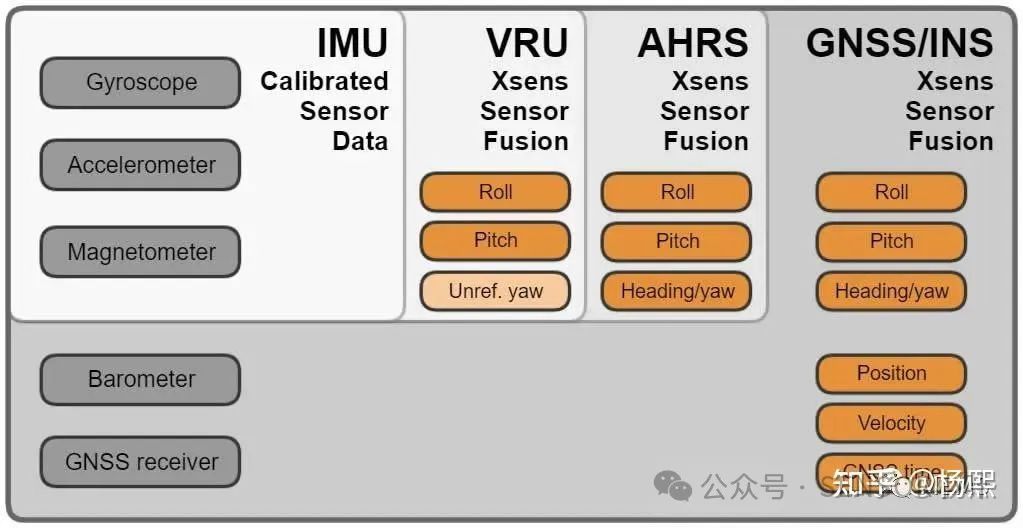
IMU傳感器的另一個應用是跟蹤無人機、直升機和飛機的方向和航向。
通常,這些解決方案使用IMU傳感器和電子羅盤(即磁力計)的組合。這種組合有AHRS傳感器的技術名稱。(姿態和航向參考系統)。
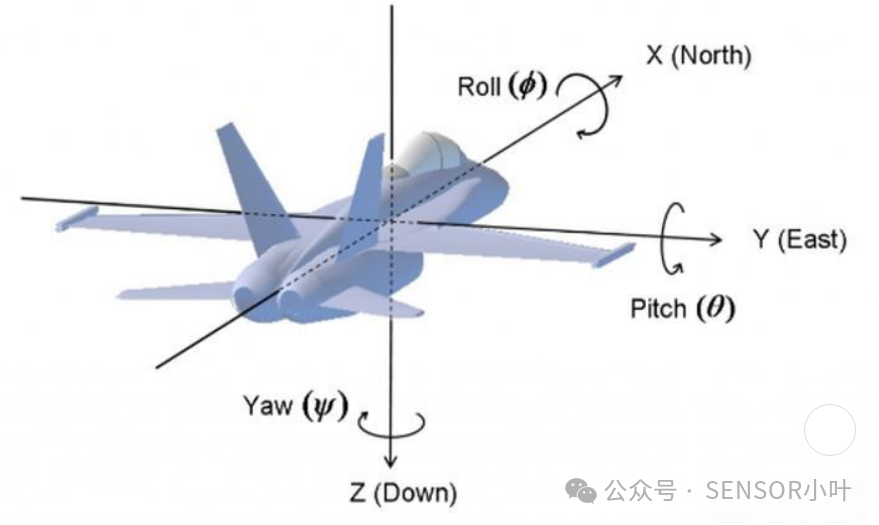
基本上加速度計的角度告訴我們無人駕駛飛機在地面,陀螺儀使用此數據作為參考和計算,偏航和滾動不斷無人機飛行約和磁強計告訴我們的方向無人機是領導對我們地球的磁場,這樣我們就能在地圖上找到它!
IMU和MARG傳感器有什么區別?MARG代表磁力計、角速度和重力,基本上是指IMU和指南針(磁力計)的組合。如本應用中所討論的,這些主要用于飛機。
應用:虛擬現實頭盔
虛擬現實是一項即將問世的技術,它將給游戲行業帶來革命性的變化。如果你之前沒有嘗試過使用VR頭盔,我建議你嘗試一下,這是進入數字世界的一種有趣的方式,就像《黑客帝國》!
如果你有一個很好的預算,你可以得到一個眼睛裂谷VR耳機(鏈接到亞馬遜),或者如果你是一個緊你可以嘗試一個廉價的替代品如Xiomi耳機或谷歌紙板(鏈接到亞馬遜),對智能手機的虛擬現實體驗!
虛擬現實頭盔主要使用這些IMU傳感器來跟蹤你的頭部位置,以改變它發出的視頻信號。例如,當你向上看時,你實際上是在繞x軸旋轉你的頭,這將被放置在你VR頭盔里的IMU傳感器的陀螺儀所感知,反過來,這將給你天空的視頻feed。當你往下看的時候,你將你的頭轉向相反的方向,你就可以看到地面了!
SENtral M&M9軸/10軸運動測量模塊
SENtralM&M運動和測量模塊是一個蜂窩式印刷電路組件,可方便地將完整的運動傳感器融合系統快速集成到可穿戴或移動設備中。一個模塊包含SENtal運動協處理器、磁力計、加速計、陀螺儀和可選氣壓傳感器,其中不同的SENtral M&M版本集成了不同的傳感器模型。SENtral運動協處理器管理和使用來自傳感器的數據,以提供可靠的運動跟蹤和精確的方位,同時消耗相當于基于ARM的傳感器融合微處理器的1%的功率。SENtral輸出歐拉角(也就是航向、俯仰和滾轉)、四元數和傳感器數據。四元數唯一地定義了方向, 并且與歐拉角不同,當指向正上方時不經歷奇點即萬向鎖。它們可以很容易地轉換為歐拉角、旋轉向量和旋轉矩陣僅稱DCM 。

特點:
vSENtral M&M運動定向跟蹤模塊,包括SENtral運動協處理器、三軸陀螺儀、三軸加速度計、三軸磁力計和氣壓傳感器。
v低功耗:從效率較低的主機CPU中卸載傳感器處理消耗的功率小于運行可比傳感器融合算法的通用微處理器的1 %。提供調整功耗和運動跟蹤性能之間權的能力。
v11x11毫米的占地面積和SMT設計,便于集成到用戶的系統中。
vI2C接口: 在低功率實現中使用行業標準的I2C協議來連接傳感器和主機因此系統集成是簡單的。主機總線支持標準、快速快速加號和高速。
v輸出:SENtral本地輸出歐拉角6 向、俯仰和滾動、四元數、旋轉速度、線性加速度和磁場。通過允許與I2C傳感器總線上的設備進行直接通信。
v具有不同傳感器的多種版本。
訂貨部件型號 | 涵蓋器件 | 顏色 | 尺寸 |
13734 | 僅SENtral | M&M白色 | 8.64×8.64×0.81mm |
13763 | MPU6500(加速度/陀螺)+AK8963(磁傳感器) | M&M紅色 | 11×11×1.43mm |
13736 | LSM330(加速度/陀螺)+AK8963 | M&M綠色 | 11×11×1.43mm |
13738 | LSM9DS0(加速度/陀螺/磁傳感器) | M&M黃色 | 11×11×1.43mm |
13759 | LSM330+RM3100(磁傳感器) | M&M藍色 | 22×11×6.75mm |
13771 | BMI055(加速度/陀螺)+AK8963 | M&M橙色 | 11×11×1.43mm |
13807 | BMI160(加速度/陀螺)+BMM150(磁傳感器)+BMP280(氣壓) | M&M紫色 | 11×11×1.43mm |
13813 | LSM6DS3(加速度/陀螺)+AK9911(磁傳感器)+LPS25H(氣壓) | M&M粉紅 | 11×11×1.43mm |
-
傳感器
+關注
關注
2577文章
55311瀏覽量
793078 -
陀螺儀
+關注
關注
44文章
894瀏覽量
101936 -
IMU
+關注
關注
6文章
422瀏覽量
48053
發布評論請先 登錄
穩如磐石,控于毫厘:MEMS三軸陀螺儀穩控新高度

單軸MEMS陀螺儀:精準導航與穩定的核心

STM32H5開發陀螺儀LSM6DSV16X(1)----輪詢獲取陀螺儀數據

多軸陀螺儀怎么選?

光纖陀螺儀與慣性導航系統在無人車駕駛中的應用

什么是光纖陀螺儀?陀螺儀有哪些作用?
為什么三軸MEMS陀螺儀是無人機飛控系統的核心傳感器?

**無人機飛控如何靠三軸MEMS陀螺儀實現穩定飛行?**
MEMS陀螺儀正在取代光纖陀螺儀?
求助,關于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
MEMS陀螺儀的尋北原理是什么?精度如何?

ADXRS290用于穩定應用的超低噪聲、雙軸MEMS陀螺儀技術手冊



 工商網監
工商網監
評論