 人形機器人一體化關節:如何解決高動態工況下的“測不準”?
人形機器人一體化關節:如何解決高動態工況下的“測不準”?

本文導讀
GB/T 43200-2023標準對機器人關節測試提出了高精度與高動態要求。本文針對測試中存在的時序誤差與動態捕捉難題,解析電氣性能驗證的技術難點,提供致遠儀器PA系列功率分析儀的機電同步采集與測試方案。
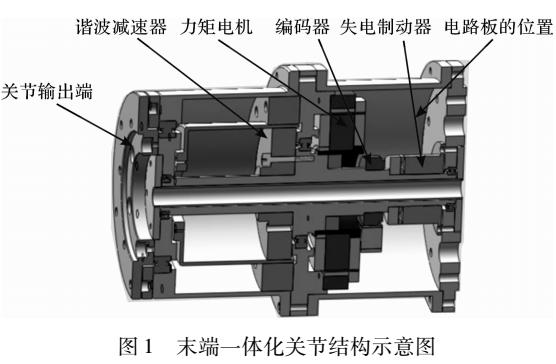
一體化關節(Joint Module)作為人形機器人的核心驅動單元,其集成度直接決定整機的運動性能。
隨著GB/T 43200-2023《機器人一體化關節性能及試驗方法》的實施,行業建立了明確的技術規范。傳統的測試方法在面對關節的高集成“黑盒”特性時,常面臨效率計算偏差與動態信號捕捉困難兩大挑戰。
電氣性能測試的關鍵挑戰
電氣性能是關節動力輸出的底層保障,測試需嚴格遵循GB/T 43200-2023的環境條件(溫度15℃-35℃、相對濕度25%-75%)與設備精度要求(功率分析儀準確度不低于0.5級)。依據GB/T 43200,電氣性能測試不再是簡單的穩態記錄,而是對測試系統同步性與帶寬的要求:1.額定功率與效率測試:
- 國標要求:在額定工況下,同步采集輸入電參量(U,I)與輸出機械參量(T,n),按公式?=(2π﹒nN﹒TN)/(60﹒U﹒I)×100%計算,且標準規定需連續測試3次并取平均值。
- 技術難點:傳統“萬用表+扭矩儀”的分散測試方案,因數據采集存在毫秒級時差,導致輸入與輸出功率計算不匹配。三次測試結果波動大,難以滿足標準對數據一致性的要求。
2.極限動態工況:瞬態過載捕捉
轉矩過載能力:針對“瞬時最大轉矩”測試,標準要求固定輸出端并測量峰值電流。這要求測試儀器必須具備高采樣帶寬,才能準確記錄短時過載的真實數值。
- 功率密度與可靠性:在“最高轉速”測試中,需在空載下以最高速正、反方向連續運轉2min。測試系統需在持續高頻信號下保持無漂移記錄,以支撐功率密度(KP=PN/m)核算及結構可靠性驗證。

圖1試驗裝置
輔助性能測試與可靠性驗證
除核心電氣指標外,標準中規定的可靠性測試指標還包括:
機械性能:反向啟動轉矩(需正反向各測5次取最大值)及背隙(±3%額定轉矩下的角度偏差);
控制性能:絕對定位精度及穩態運行下的轉速波動系數;
環境適應性:參照GB/T 39266(振動/沖擊)與GB/T 10069.1(噪聲)執行物理環境耐受度測試。

圖2 許用彎矩載荷試驗裝置
測試方案優化:PA功率分析儀的應用
針對GB/T 43200-2023提出的多參量同步與0.5級精度要求,致遠儀器PA系列功率分析儀擁有0.05%以上的測量精度,可支持7通道電壓電流和扭矩轉速采集,提供符合國標要求的高精度同步測試方案:
1.機電同步采集,支撐高效能效評估
測試架構:設備支持單機同步接入電源輸入的電壓電流信號,以及負載輸出的轉矩轉速信號;
方案優勢:從物理層實現了電-機信號的同源采集,消除分散儀器間的時序偏差。無需人工對賬,即可直接輸出精準的效率?計算結果,并支持自動化繪制關節在不同負載下的效率曲線(Efficiency Curve),大幅降低人工與時間成本。
2.動態波形分析,匹配復雜瞬態需求
瞬態捕捉:針對標準中的“瞬時最大轉矩”及階躍響應測試,設備的高帶寬特性可精準捕獲啟動瞬間的峰值電流與轉速突變,真實還原關節的動態性能;
故障診斷:支持長時記錄轉速與扭矩的瞬時波動波形,幫助工程師透視數據細節,快速定位齒輪磨損、機械裝配松動等潛在傳動異常。
3.多維電能質量評估,前置兼容性驗證
環境模擬:系統內置諧波檢測及三相平衡度分析功能,可配合可編程電源模擬電網線路故障工況;
EMC評估:在零部件測試階段,即可驗證關節在復雜供電環境下的電氣穩定性與電磁兼容性(EMC),有效降低后期整機聯調的整改風險。

圖3 電機變頻研發與測試
結 語
當一體化關節成為人形機器人進化的關鍵變量,測試手段也必須隨之升級。準確量化每一份能量的轉換,嚴格執行每一次國標的考量,致遠儀器愿以“測得準、測得快”的高精方案,助力國產機器人核心部件的高質量落地。

-
測試
+關注
關注
9文章
6201瀏覽量
131343 -
人形機器人
+關注
關注
7文章
975瀏覽量
18496 -
機器人關節
+關注
關注
0文章
27瀏覽量
344
發布評論請先 登錄
伺服電動缸在人形機器人中的應用
為什么人形機器人更討人喜歡?
高動態人形機器人“夸父”通過OpenHarmony 3.2 Release版本兼容性測評

專為人形機器人應用打造,助力具身智能行業發展,泰科機器人關節模組持續升級!

山田光學:一體化機芯在機器人領域的創新應用
國產一體化關節模組:突破關鍵,賦能機器人生態



 工商網監
工商網監
評論