 從汽車產業邁向具身智能:共通性與差異化布局的深度探索
從汽車產業邁向具身智能:共通性與差異化布局的深度探索

佐思汽研發布《2024-2025年主機廠與供應商布局具身智能(及AI機器人)的趨勢分析報告》。
一、布局具身智能:主機廠與供應商的多元路徑
在具身智能浪潮下,汽車產業鏈的主機廠和供應商紛紛入局,積極探索適合自身的發展策略。當下,布局方式主要分為自研、合作研發、投資以及合作探索應用這幾類,每種方式都各有優劣,企業需依據自身資源、技術實力和市場目標來抉擇。
簡單來說,具身智能(Embodied Artificial Intelligence, EAI)是一種基于物理身體進行感知和行動的智能體(Agent),它就像賦予機器人一個能與環境交互的 “身體”,使其能像人類一樣通過觀察、移動、說話來學習和執行任務 。這一概念的興起,為汽車產業帶來了前所未有的機遇與挑戰。
01
技術發展一脈相承,車企加速部署人形機器人:
車企布局具身智能的核心邏輯在于技術復用、供應鏈協同、市場增量挖掘。同時,智能駕駛技術(如感知算法、決策模型)與具身智能高度同源,車企可將自動駕駛積累的AI能力遷移至機器人開發,降低研發成本。未來,隨著硬件成本下降與大模型能力提升,具身智能將從工業場景逐步滲透至消費領域,成為車企智能化轉型的關鍵支柱。
主機廠具身智能賽道布局情況


來源:佐思汽研《2024-2025年主機廠與供應商布局具身智能(及AI機器人)的趨勢分析報告》
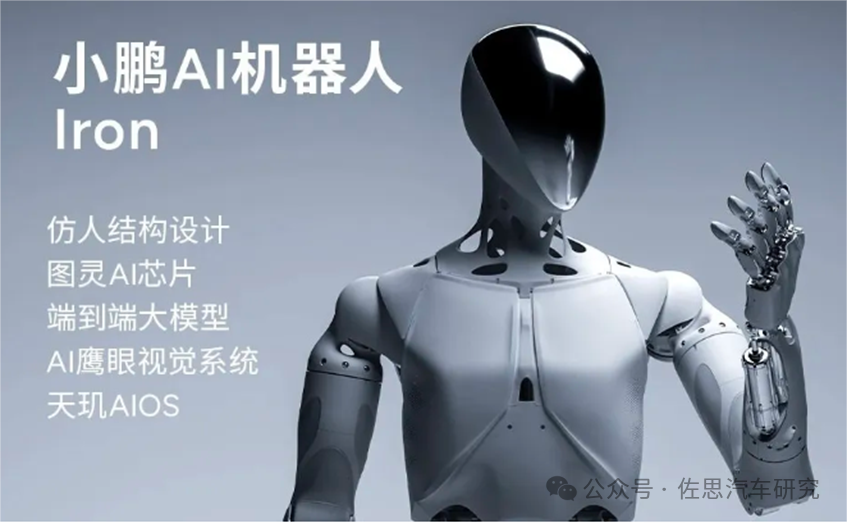
2024年11月6日,小鵬汽車“AI科技日”上,小鵬汽車亮相了全新一代人形機器人“Iron艾倫”,該款人形機器人已經進入小鵬汽車廣州工廠進行了小鵬P7+車型的生產實訓,未來將會聚焦在工廠和線下門店等場景。
Iron采用仿人結構設計,身高178cm,體重70kg,采用1:1人類雙手尺寸設計,擁有15個自由度,支持觸覺反饋;它擁有超過60個關節,可以模擬人類的多種動作,如站立、躺臥、坐等;
Iron搭載了小鵬 AI 鷹眼視覺系統,實現了720°無死角的環境感知能力,還運用了端到端大模型和強化學習算法
搭載與小鵬汽車同款的小鵬天璣AIOS系統,給機器人流暢自由對話的能力,有記憶、能推理
采用了一款名為圖靈AI芯片的核心技術,該芯片專為大模型定制,擁有40核處理器,算力為3000T,這款芯片是首顆可同時應用于AI汽車、AI機器人和飛行汽車的芯片。
來源:小鵬汽車
02
供應商全面發力,深度布局具身智能產業鏈
汽車供應商依托既有硬件技術(如傳感器、芯片、電機)和供應鏈資源,向具身智能領域延伸,核心邏輯在于技術復用與協同降本。例如,激光雷達廠商速騰聚創將車載感知方案適配至機器人,實現環境建模能力的遷移;電機企業復用汽車動力總成技術開發高密度關節驅動模塊。其優勢在于成熟的制造經驗和客戶網絡,但需應對機器人場景對硬件靈活性的嚴苛要求。
供應商具身智能賽道布局情況

來源:佐思汽研《2024-2025年主機廠與供應商布局具身智能(及AI機器人)的趨勢分析報告》
2025年1月3日,RoboSense速騰聚創“Hello Robot”2025 AI機器人全球線上發布會,首次全面呈現了RoboSense速騰聚創的機器人技術平臺公司戰略,并發布了多款數字化激光雷達,推出機器人視覺產品,以及一系列面向機器人的增量零部件及解決方案。
在發布會上,速騰聚創推出具有20自由度的第二代靈巧手,最大負載5千克,在指尖指腹和手掌上共有14個力傳感器,配合機械臂及其控制系統,可靈活復刻人手的精細動作和操作,例如精細地拿起雞蛋、撿起螺絲釘等。

來源:速騰聚創
此外,速騰聚創首次展示了自研的人形機器人整機,該機被定義為機器人通用零部件開發平臺,是各項機器人增量零部件及解決方案的研發“母機”。立足于整機,速騰聚創將聚焦于機器人的視覺、觸覺、關節三類增量零部件領域,為機器人行業賦能。此次速騰聚創還公布了適用于足式機器人的末端運動控制的力傳感器FS-3D、高功率密度直線電機LA-8000和高集成化、小體積、大算力、低功耗的機器人域控制器DC-G1等產品。
速騰聚創機器人增量零部件
03
自動駕駛領域技術人才入局具身智能
從業者轉型的核心驅動力是技術路徑趨同與行業紅利轉移。自動駕駛行業L4商業化遇阻后,資本與人才向具身智能傾斜,而兩者在感知算法、決策模型(端到端強化學習)上高度重疊,算法經驗可直接遷移。從業者優勢在于AI算法積累和快速迭代能力,但需補足機械控制(如力反饋、運動規劃)等硬件交互知識,且面臨技術路線不確定性與商業化驗證風險。其目標是通過軟硬件協同創新,搶占具身智能早期技術制高點。
智能駕駛從業人員轉型具身智能賽道情況

來源:佐思汽研《2024-2025年主機廠與供應商布局具身智能(及AI機器人)的趨勢分析報告》
2023年11月,文遠知行前COO張力宣布加入逐際動力(LimX Dynamics),擔任首席運營官(COO)。張力在自動駕駛領域擁有豐富的經驗,曾領導文遠知行在RoboTaxi商業化落地和技術研發方面取得顯著成績。他的加入標志著逐際動力在具身智能領域的進一步發力,也反映了自動駕駛與具身智能兩大前沿技術領域的深度融合趨勢。
2024年10月逐際動力推出“三合一” 模塊化足端設計多形態雙足機器人TRON 1,專為復雜環境下的移動與操作任務設計。TRON1采用了先進的運動控制算法和高精度傳感器融合技術,能夠在非結構化地形(如樓梯、碎石路)中穩定行走,并完成爬坡、越障等高難度動作。其模塊化設計允許用戶根據任務需求靈活配置功能模塊,例如搭載機械臂進行抓取操作,或集成視覺傳感器用于環境感知與導航。TRON1的核心優勢在于其高度靈活的運動能力和強大的環境適應性,使其在工業巡檢、應急救援、物流配送等領域具有廣泛的應用潛力。
多形態雙足機器人TRON 1
二、機器人與汽車產業:異同交織下的協同發展
01
產業相通性:技術與供應鏈的協同基礎
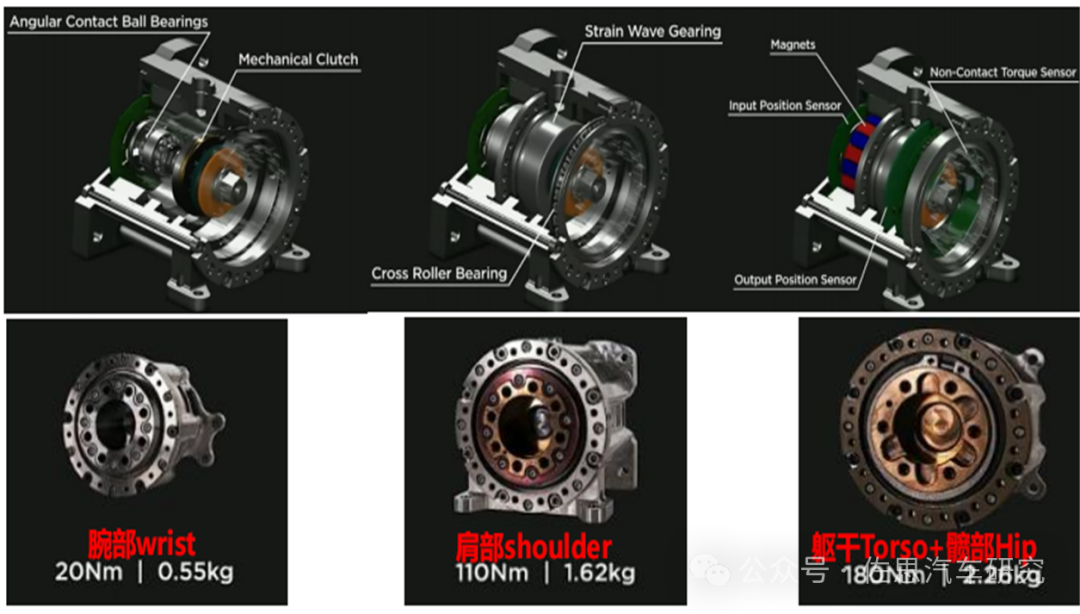
硬件層面:機器人和汽車產業在硬件零部件方面存在著高度的相通性。電機、傳感器、減速 / 轉換機構、電池、軸承、結構件、冷卻系統、控制器、芯片等硬件,在兩個產業中都有著廣泛的應用。以特斯拉 Optimus 為例,其在設計中大量借鑒了汽車的硬件技術。
以特斯拉為例,Optimus每個(共14個)旋轉關節使用2個角接觸球軸承、1個交叉滾子軸承;每個(共14個)線性關節使用1個四點接觸軸承、1個滾珠軸承。這4種軸承在汽車產業已經廣泛使用。
Optimus旋轉執行器
圖片來源:特斯拉
傳感器方面:激光雷達、攝像頭、毫米波雷達等在汽車自動駕駛和機器人導航中都起著關鍵作用。汽車借助激光雷達精準探測前方障礙物、識別道路邊界,實現自動駕駛;AI機器人則依靠激光雷達掃描周邊環境,靈活避障、精準導航。此外,控制器作為 “智慧大腦”,汽車的電子控制單元(ECU)和機器人的運動控制器在底層邏輯上殊途同歸,都是接收傳感器信號,依據預設算法迅速運算,向執行器下達指令 。
小鵬Iron人形機器人使用的鷹眼視覺系統具體技術細節主要依賴于小鵬的智駕體系,該系統結合了端到端大模型和強化學習算法。這種視覺系統使得Iron能夠在720°范圍內無死角地觀察周圍環境。
小鵬AI鷹眼視覺系統
軟件技術:車企在自動駕駛領域積累的算法能力為具身智能的發展提供了寶貴的經驗。人形機器人自主處理任務和汽車自動駕駛的本質都是 “感知 — 決策 — 執行” 的過程,兩者在模型層面存在一定互通性。在路徑規劃、運動軌跡預測等關鍵算法上,智能駕駛的算法能夠復用于人形機器人 。
例如,特斯拉將 FSD 自動駕駛系統中的視覺、導航和 AI 算法技術應用于 Optimus,使其具備了環境感知和自主決策能力。受益于Dojo計算機等特斯拉日益強大的AI訓練能力和自動駕駛場景模擬系統,特斯拉機器人在出廠前就將具備對環境路徑、周圍物體的識別和路徑規劃能力。
供應鏈:汽車供應鏈的成熟經驗也為機器人產業的發展提供了有力支持。機器人產業鏈與汽車供應鏈在部分零部件技術上同源,如電池、電機、軸承等產品在車端和機器人端差異較小。車端供應鏈經過長期發展,具備大規模自動化生產經驗,能夠幫助機器人實現量產降本 。
02
產業差異性:市場需求與技術重點的差異
供應鏈—零部件定制化程度:
汽車:汽車零部件雖種類繁多,但由于汽車標準化生產程度高,許多零部件通用性較強,可大規模生產以降低成本。
機器人:具身智能產品應用場景多樣,形態和功能差異大,導致零部件定制化程度高。如用于醫療手術的機器人與家庭清潔機器人,其關節結構、傳感器配置等零部件因功能需求不同而有很大差異,難以實現大規模標準化生產
供應鏈—響應速度:
汽車:汽車生產周期較長,從設計到量產可能需要數年時間,供應鏈相對穩定,對響應速度要求并非極短周期。汽車制造商通常會提前規劃生產計劃,與供應商簽訂長期合同,確保零部件穩定供應。
機器人:市場需求變化快,技術更新迭代迅速,要求供應鏈具備更快的響應速度。如消費級的智能機器人,一旦市場出現新的功能需求或技術突破,制造商需迅速調整產品設計
硬件技術—集成度與復雜度:
汽車:汽車是一個高度集成的復雜系統,眾多硬件組件緊密協作。發動機/電機系統、電驅系統、電池系統、變速器、底盤、電氣系統等,每個子系統都有其復雜的設計和功能,且需相互適配。
機器人:雖然也涉及多硬件協同,但集成方式和重點不同。具身智能產品可能更側重于特定功能模塊的集成,如機器人關節模塊集成電機、傳感器與控制器。
硬件技術—能源存儲:
汽車:新能源汽車以動力電池為主要能源存儲設備,如鋰離子電池。其電池容量需求大,通常以千瓦時(kWh)為單位計量,目的是支撐車輛實現較長的續航里程,一般在幾百公里左右。
機器人:能源存儲硬件多樣且靈活,依據產品功能和應用場景選擇。與新能源汽車相比,具身智能產品能源存儲硬件更注重小型化、輕量化以及對不同任務場景的適配性,而非單純追求高續航里程。
軟件技術—算法與數據處理:
汽車:在自動駕駛領域,算法側重于環境感知與決策規劃,如目標檢測與識別算法用于識別道路上的車輛、行人等,路徑規劃算法根據感知信息規劃安全行駛路徑。數據處理主要圍繞車載傳感器收集的路況信息,數據量巨大但類型相對固定。
機器人:算法涵蓋更廣泛領域,除環境感知與運動規劃外,還包括自然語言處理、情感識別等交互算法。數據來源多樣,不僅有傳感器數據,還可能涉及用戶交互數據、云端數據等。
03
布局之路:主機廠與供應商的關鍵考量
技術研發與創新:
加大在具身智能核心技術上的投入,如大模型、傳感器融合、運動控制、人機交互等領域。像特斯拉在 Optimus 的研發中,不斷優化 FSD 技術遷移后的效果,提升機器人的感知和決策能力;華為持續迭代盤古具身智能大模型,增強其任務規劃和多場景泛化能力。
車企與供應商在布局具身智能領域時,應避免“重復造輪子”的研發方式,汽車產業與機器人產業在諸多層面存在顯著的通用性。在供應鏈方面,二者所需的原材料與零部件供應渠道多有重合,整合供應鏈資源可大幅降低采購成本與管理難度。軟件技術層面,AI大模型與深度學習算法是具身智能實現的核心驅動力,共享這些技術成果能加速研發進程。硬件技術上,傳感器用于感知環境,電機、齒輪、軸承等負責動力傳輸與機械運動,二者高度相似 ,統一技術標準和研發方案,可減少重復研發投入。
市場需求與應用場景拓展:
具身智能作為新興領域,市場需求和應用場景仍在不斷探索和拓展。企業應加強市場調研,深入了解不同行業和用戶的需求特點,針對性地開發產品和解決方案。積極與潛在客戶合作,開展試點項目和應用示范,積累市場經驗,提高產品的市場適應性和競爭力 。
除了常見的工業制造、物流倉儲、家庭服務等場景,積極探索具身智能在醫療、教育、農業等領域的應用潛力。比如,研發用于醫療康復的輔助機器人、教育陪伴的智能機器人、農業生產的采摘和耕種機器人等。通過拓展應用場景,擴大市場份額,降低對單一市場的依賴。
-
人形機器人
+關注
關注
7文章
977瀏覽量
18501 -
汽車
+關注
關注
15文章
4154瀏覽量
41096
原文標題:從汽車到具身智能研究:產業相通性下的差異化布局策略
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
中興通訊推動具身智能產業邁向規模商用的思考與實踐
《具身智能發展報告(2025年)》

openKylin與OpenLoong共推具身智能產業落地
具身智能交流會
萬億級賽道:“具身智能十大觀察”報告

《全球具身智能技術產業發展趨勢(2026年)》報告
【「AI芯片:科技探索與AGI愿景」閱讀體驗】+具身智能芯片
阿普奇加入江蘇省具身智能機器人產業聯盟,成為理事單位

華為出席5G-A網絡賦能差異化體驗產業圓桌
ArkUI-X平臺差異化
2025年中國具身智能產業TOP100


激活具身智能創新加速度,九章云極DataCanvas公司領航CEAI 2025中國具身智能大會

EM儲能網關 ZWS智慧儲能云應用(8) — 電站差異化支持




 工商網監
工商網監
評論