 激光雷達+攝像頭融合傳感器,有沒有搞頭?
激光雷達+攝像頭融合傳感器,有沒有搞頭?

電子發燒友網報道(文/梁浩斌)對于自動駕駛而言,除了自動駕駛算法之外,傳感器標定一直都是一個難題,一般會在車輛出廠前駛入到專門的場地使用特定設備來對各種傳感器進行校準。尤其是多傳感器硬件下,激光雷達、攝像頭、毫米波雷達等,由于各個傳感器的位置不同,提供的數據也不同,所以包括數據融合,時間同步等問題。
最近在CES上,京瓷展示了一套獨特的方案,似乎可以解決這些問題。
世界上第一個實現光軸對齊的攝像頭+激光雷達融合傳感器
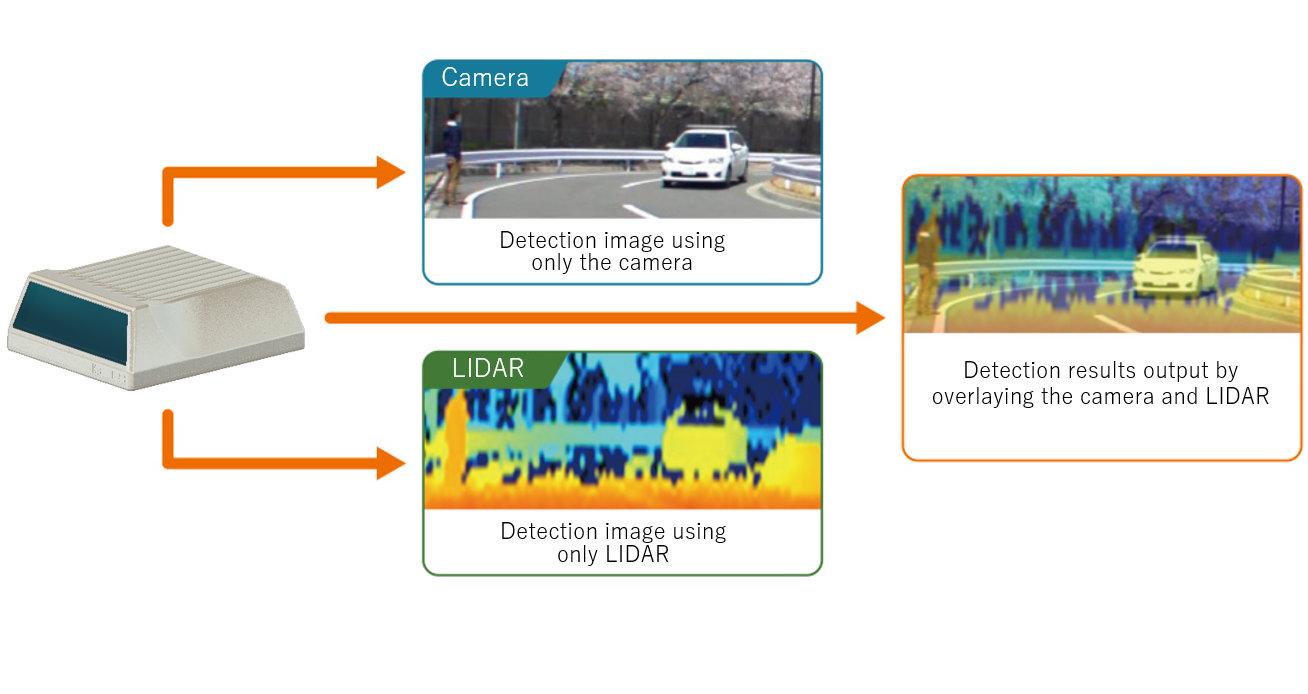
自動駕駛應用中,激光雷達和攝像頭同時使用十分普遍,激光雷達能夠提供長距離、高精度的3D環境感知信息,從而在復雜環境以高精度檢測障礙物。但過去在自動駕駛應用中,激光雷達和攝像頭都來自獨立的模塊,而獨立模塊的數據中由于部署位置不同,傳感器的視察會導致傳感器之間校準出現延遲。
來源:京瓷
而京瓷推出的攝像頭-激光雷達融合傳感器,將攝像頭和高分辨率激光雷達集成在一個單元中,用于無視差、實時數據融合,確保高效和準確的輸出結果。
京瓷表示,這是世界上第一款將攝像頭和激光雷達集成到一個光軸對齊的單元上的產品,這使得攝像頭圖像數據和激光雷達距離數據的實時融合,可以實現迄今為止最先進的物體識別能力。
光軸即光學系統中光線傳播的中心線,通常是透鏡或反射鏡的對稱軸。光軸對齊一個常見應用就是手機攝像頭中,鏡頭的多個鏡片和CMOS圖像傳感器中心對齊,避免像差、失真或光損失。
但對于一個多傳感器融合的系統而言,就會給光軸對準帶來了極高的難度。首先激光雷達通過發射激光束并接收反射回來的信號來測量距離,生成點云數據;而攝像頭則捕捉環境的二維圖像。這兩種傳感器的數據格式不同,坐標系也不同,使得直接對齊它們的光軸變得極為復雜。
京瓷的這款產品結構,是將前置激光雷達獲得圖像的光軸,與放置在激光雷達前方的攝像頭的半反射鏡進行對齊,也就是說通過半反射鏡,實現兩個傳感器的光軸對齊。即使用這個攝像頭-激光雷達融合傳感器模塊后,無需再在兩個傳感器之間進行校準工作,將原本后端處理的傳感器信息融合,轉移到了傳感器端,將無視差的數據在傳感器硬件端就實現了融合疊加。
一般激光雷達會使用MEMS振鏡或是電機進行掃描,但采用MEMS振鏡的激光雷達分辨率較低,而電機又容易出現磨損。基于京瓷在陶瓷封裝和半導體制造技術上的優勢,該激光雷達可以提供更高分辨率的同時,也能夠實現更強的耐用性。
京瓷攝像頭-激光雷達融合傳感器最終可以實現高達0.045°的角分辨率,可以在100米距離遠處掉落的30cm大小物體。
不過,由于采用半反射鏡會對進入傳感器的光線造成難以避免的衰減,所以這款融合傳感器在京瓷的規劃中分為兩個規格,分別是測距60m-100m,視場角100°×24°;測距120m-200m,視場角縮小至50°×15°。
“二合一傳感器”會成為自動駕駛趨勢嗎?
將數據融合,從后端的算力芯片轉移到光學層面和傳感器端,對于自動駕駛而言無疑具有重要意義。
在感知的準確性上,當不同類型的傳感器能夠精確對齊時,它們提供的數據可以在同一坐標系下進行融合。這意味著可以更準確地識別和定位環境中的物體,從而提高車輛對周圍環境的理解能力。
過去在一些支持純視覺自動駕駛方案的觀點中能夠看到,多傳感器會導致系統決策出現困難,比如當兩個傳感器獲取到的信息不一致,應該相信哪一個?那么將激光雷達和攝像頭進行光軸對齊后的融合傳感器中,輸出到后端算力系統中的數據就變成了深度和視覺圖像的融合數據,對于自動駕駛系統決策也能夠提供更可靠的信息。基于更準確、更全面的環境信息,自動駕駛系統的決策模塊可以做出更加合理和安全的駕駛決策。
同時,有業內人士表示,激光雷達和攝像頭實現光軸對齊后,對自動駕駛標定會產生很大幫助。由于目前圖像-點云融合在大多數情況下只能夠做到語義級別的后端融合,沒有發揮兩種傳感器互補的優勢。如果能夠以低成本實現光軸對齊,兩種傳感器數據實現像素級融合,那么前端融合算法可能會迎來新一輪發展。
小結:
根據京瓷官方的說法,攝像頭-激光雷達融合傳感器計劃在2027年實現商業化,目前市面上確實還未看到有其他廠商推出這類產品,印象中,幾年前小編在與一些激光雷達廠商交流時,也有人提到過相似的概念,但當時也只是對激光雷達未來發展路線的一種設想。到底這類產品在實際應用中能夠給自動駕駛帶來多大的收益,或許要看接下來會不會有其他廠商嘗試跟進了。
-
激光雷達
+關注
關注
979文章
4460瀏覽量
196253
發布評論請先 登錄
激光雷達點云中的空洞現象是什么原因導致的?
自動駕駛如何實現激光雷達和攝像頭的時間同步?
漢思新材料:車載激光雷達傳感器封裝膠:種類、要求及選擇指南

如何設計自動駕駛傳感器失效檢測與容錯策略?
華為Limera,激光+視覺融合的新嘗試

自動駕駛里的激光雷達有何作用?


激光雷達與車載攝像頭感知沖突應以哪個為準?

SPAD席卷車載激光雷達市場
自動駕駛中純視覺替代不了激光雷達?
超酷的樹莓派激光雷達掃描儀!

攝像頭傳感器無法通過CX3進行直播怎么解決?
激光雷達技術在自動駕駛汽車中的應用

激光雷達技術:自動駕駛的應用與發展趨勢

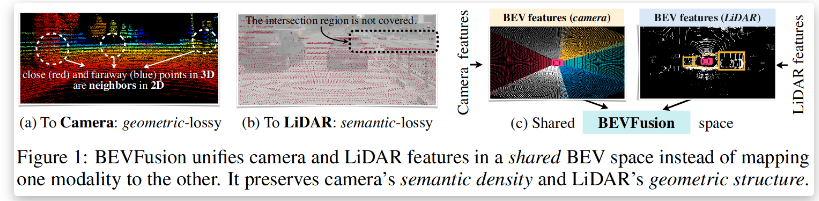
BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術詳解



 工商網監
工商網監
評論