 發那科ROBOGUIDE機器人仿真助手入門
發那科ROBOGUIDE機器人仿真助手入門

發那科ROBOGUIDE
專門為發那科機器人設計
本文給大家分享一下
ROBOGUIDE入門-創建項目
在開始操作前
要先安裝好ROBOGUIDE軟件
ROBOGUIDE創建項目
創建流程:
01打開ROBOGUIDE
02進入工作單元創建向導
03等待軟件生成,完成創建
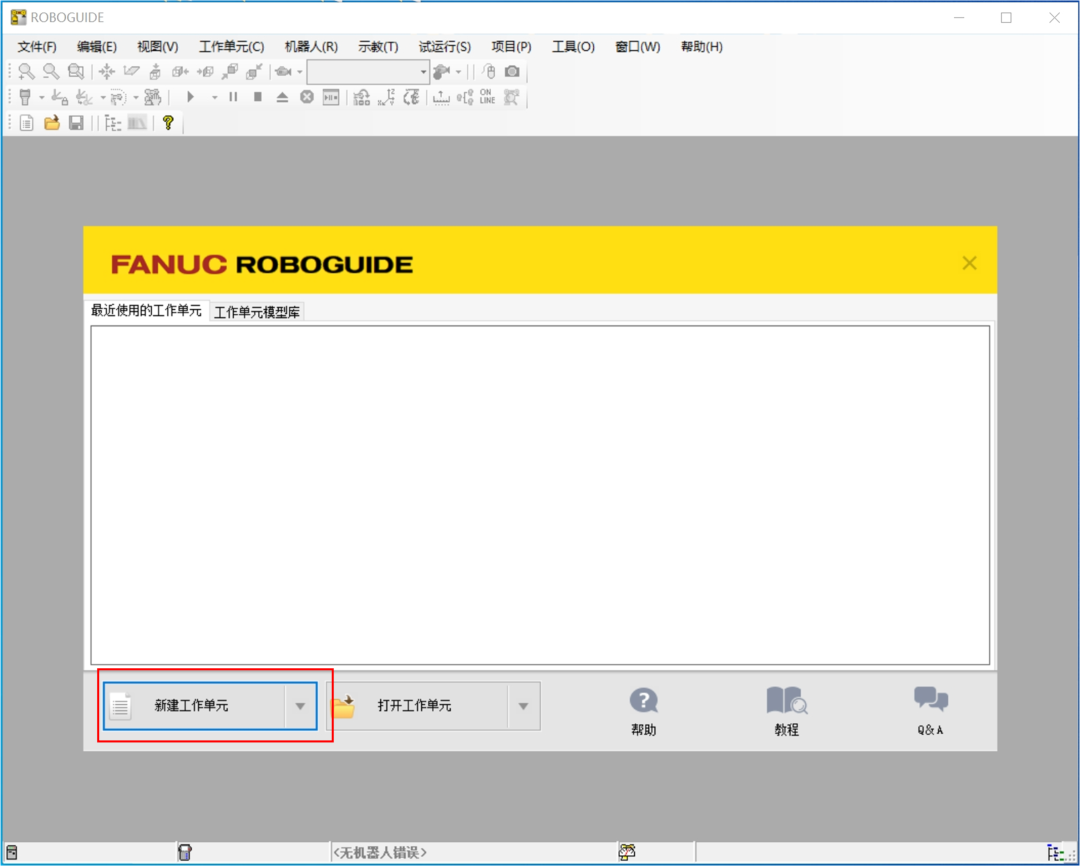
01打開ROBOGUIDE
打開軟件后,如下圖所示。然后點擊新建工作單元
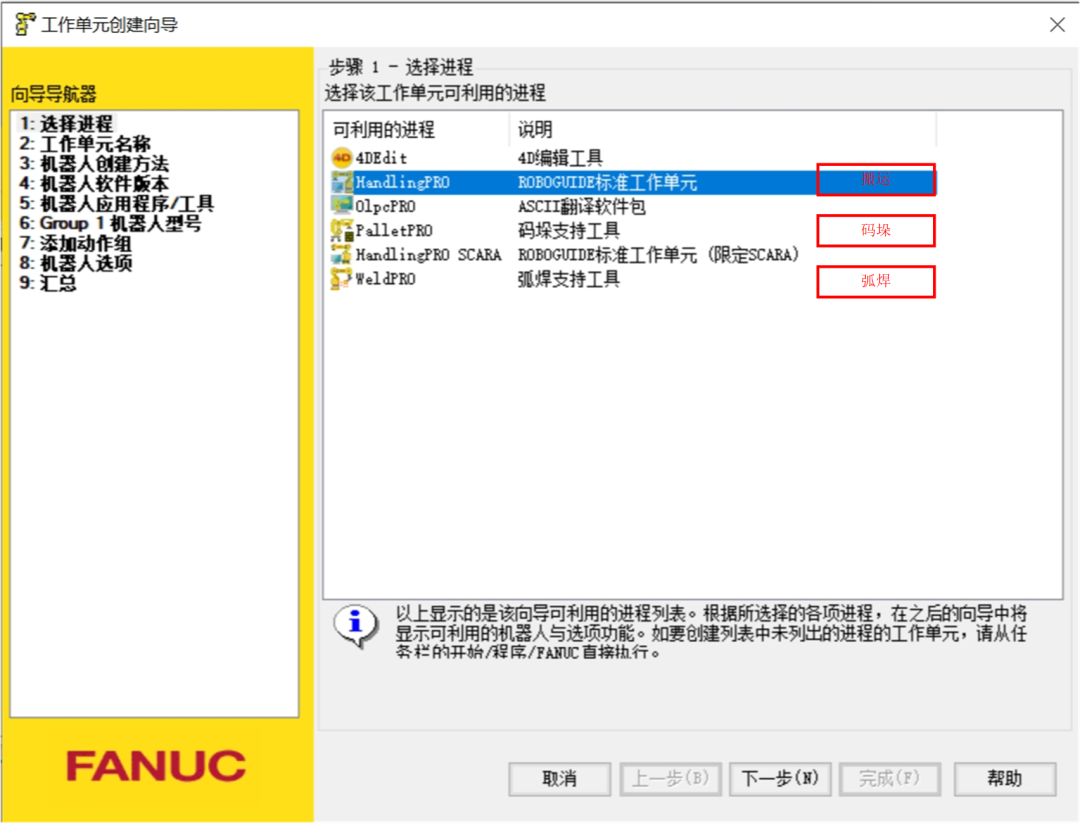
02進入工作單元創建向導
2.1 在工作單元創建向導,選擇“HandlingPRO”,即搬運工具(本例以搬運機器人進行舉例說明),點擊下一步;
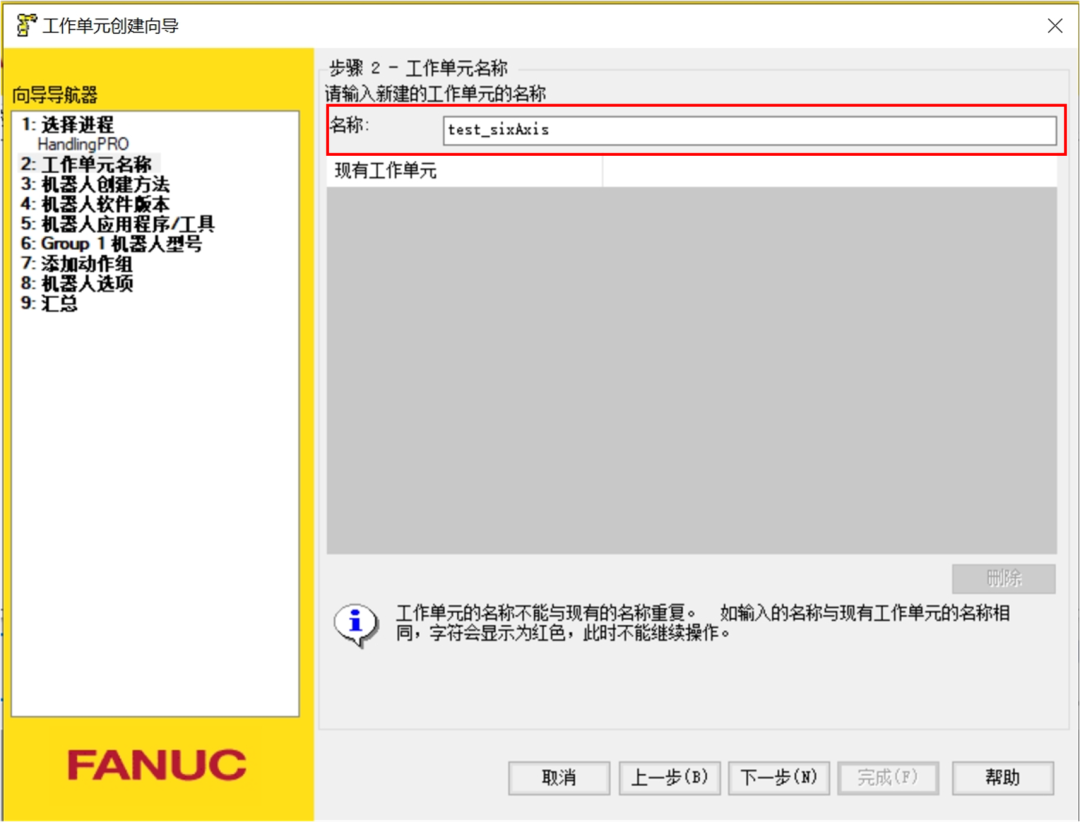
2.2 如下圖所示,設置工作單元的名稱,點擊下一步;
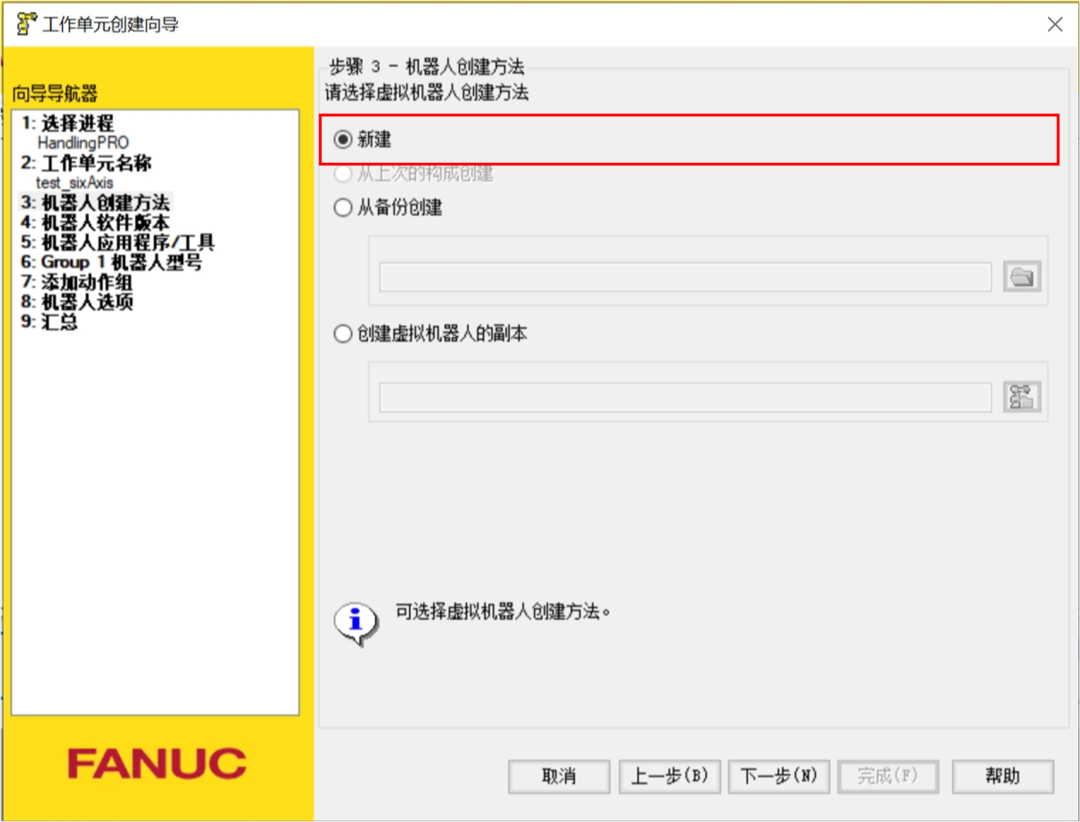
2.3 機器人的創建方法,選擇新建,點擊下一步;
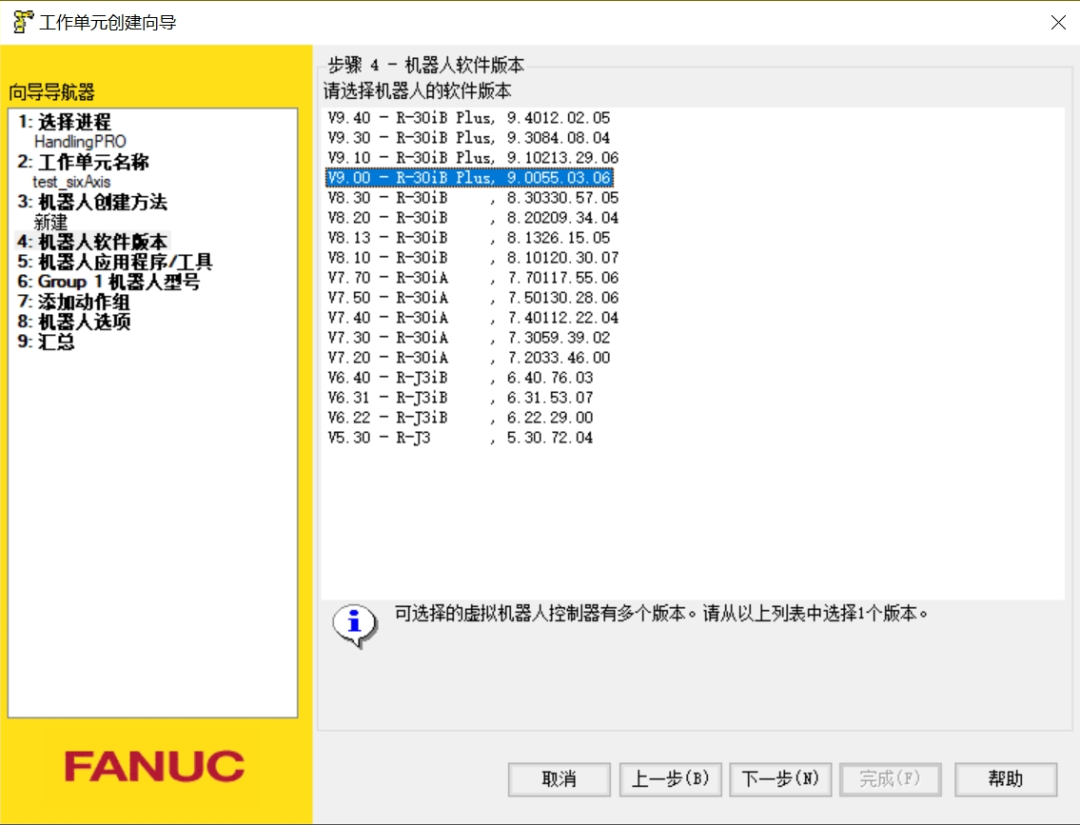
2.4 選擇機器人軟件版本(一般選擇最高版本),這里以V9.00-R-30iB Plus為例,點擊下一步;
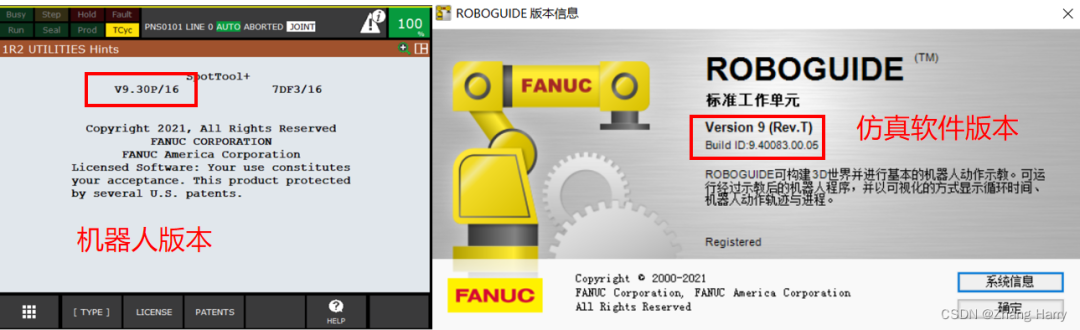
注:軟件版本需要與現場機器人對應,如果想直接導入現場機器人的備份來生成一個仿真機器人,必須要Roboguide軟件版本不低于現場機器人版本。比如V9.3、V9.4版本的軟件可以打開V9.3機器人的備份,V9.1就不行。
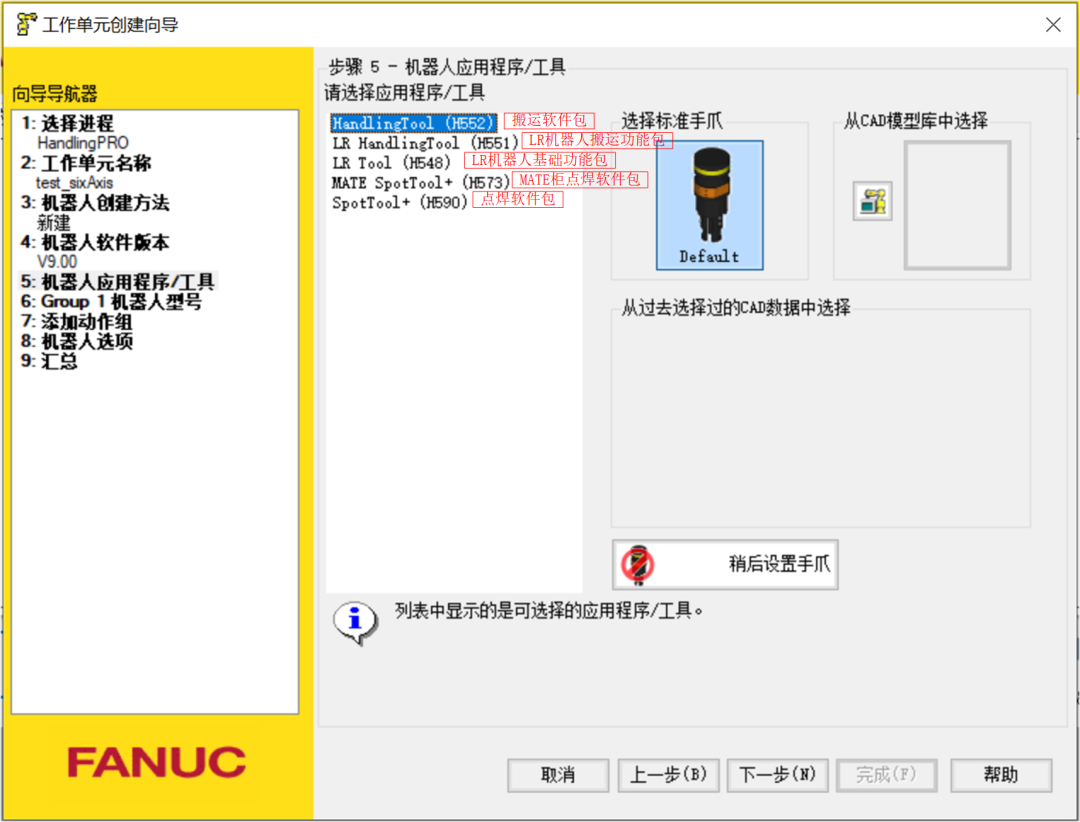
2.5 選擇機器人應用程序,本文為搬運,所以選擇搬運軟件包,點擊下一步;
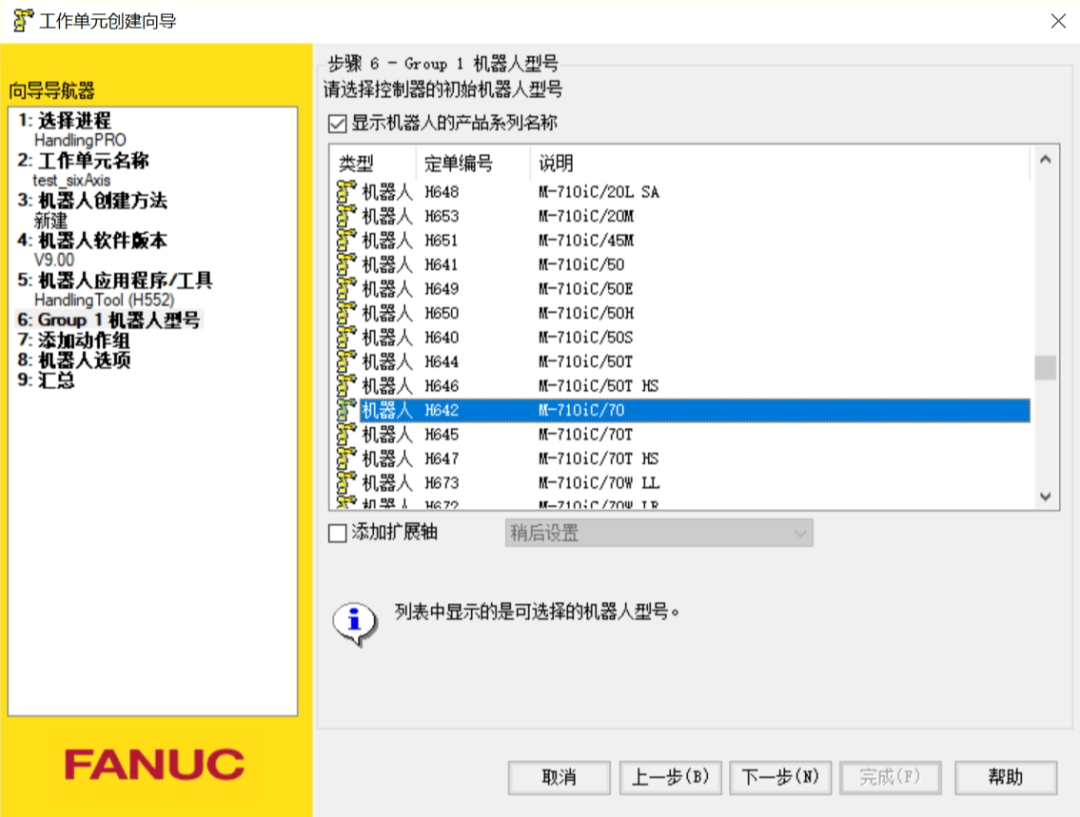
2.6 選擇機器人型號(如果選型錯誤,可以在創建之后再更改),本文選擇H642,點擊下一步;
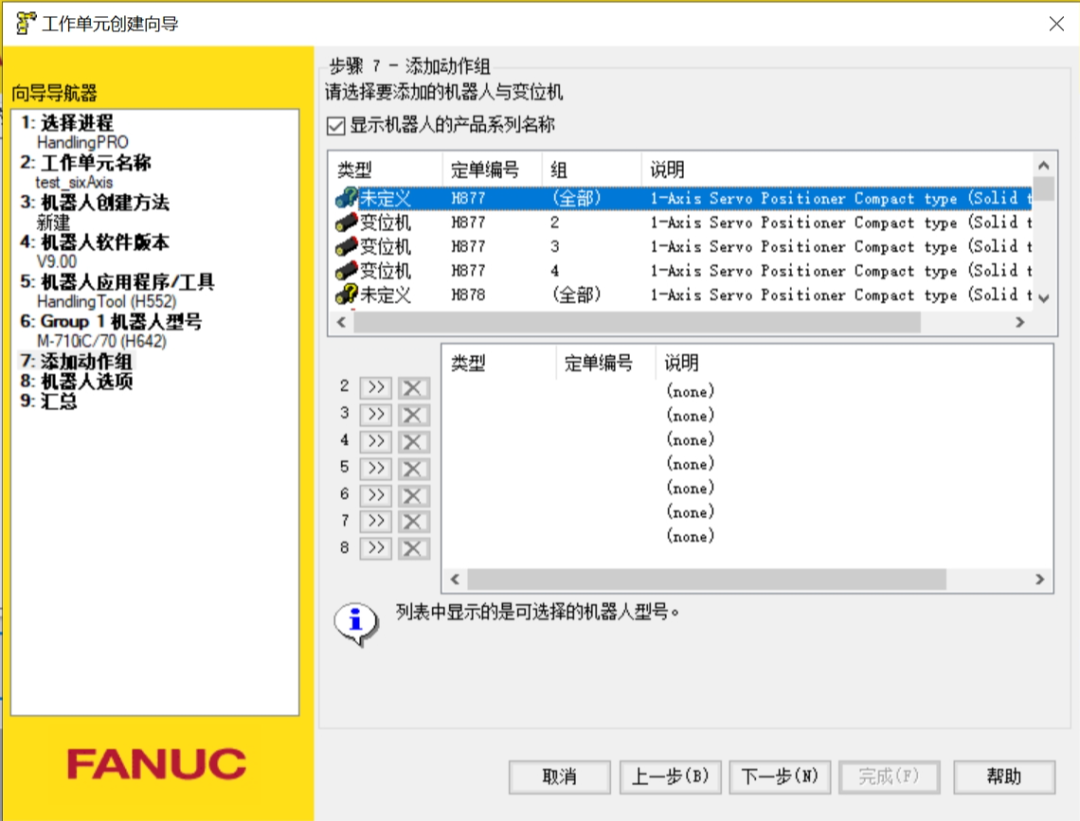
2.7 添加動作組,本文選擇未定義H877,點擊下一步;
添加完機器人本體后可以添加附加設備。可以選擇在同一控制柜中繼續添加額外的機器人(也可在建立Workcell之后添加),還可添加Group2~8的設備,如變位機等。
注意:
1.在添加Group2~8內的設備時需要依次添加,不能跳組;
2.在列表中選擇變位機等設備時,設備信息中帶有添加組限制的只能添加在限制的對應組內;
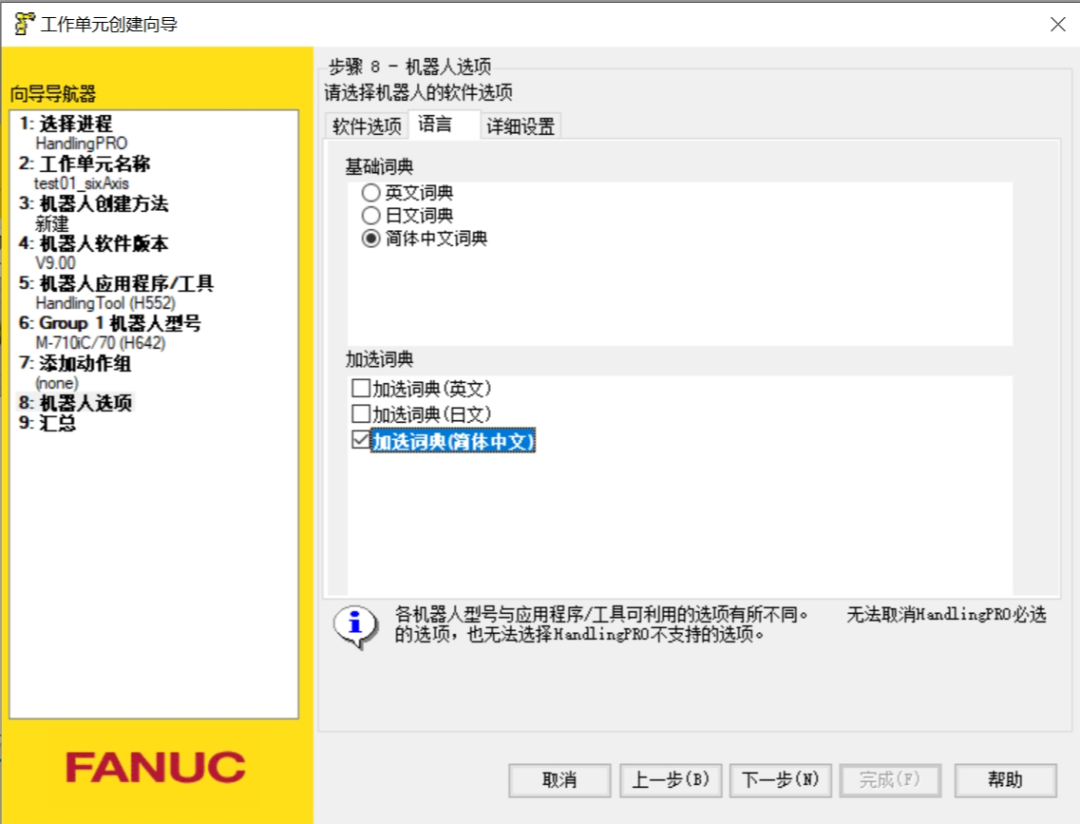
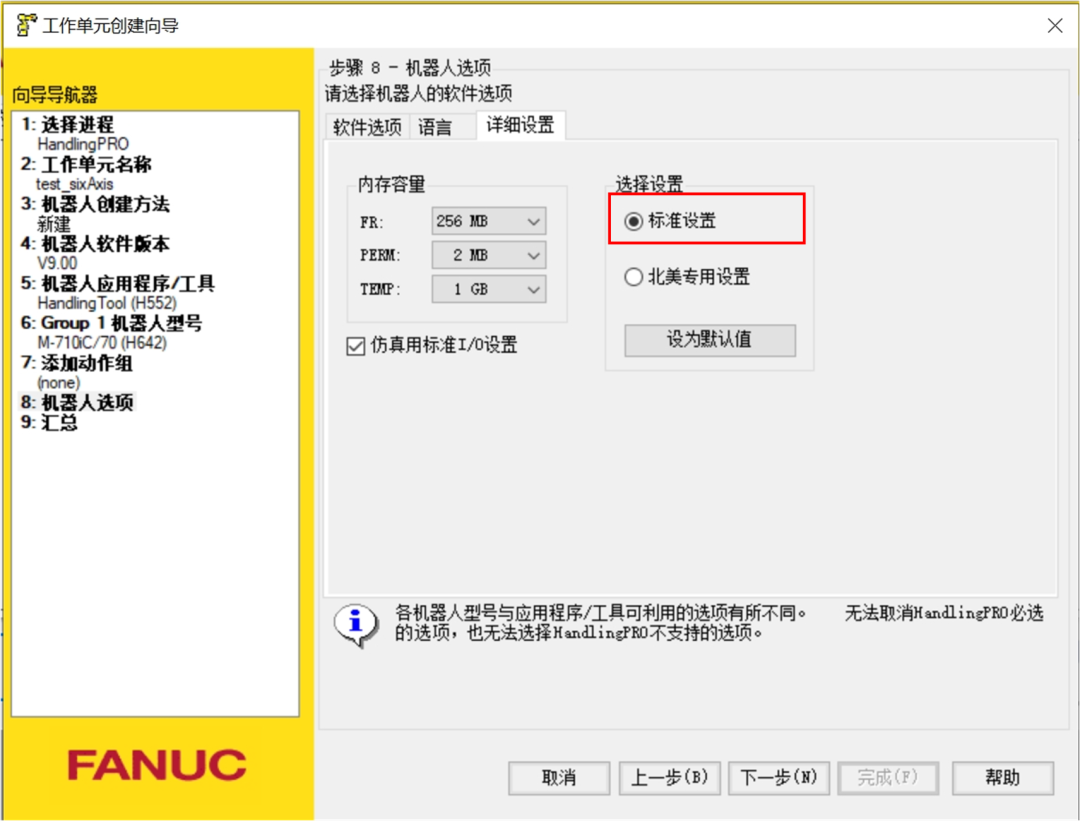
2.8 進行機器人選項:軟件選項、語言、詳細設置,點擊下一步;
添加各種應用類型內的軟件功能,將它們用于仿真,添加較多的功能應用是搬運中的附加軸控制、碼垛、點焊中的伺服槍設置、弧焊中的協同等。
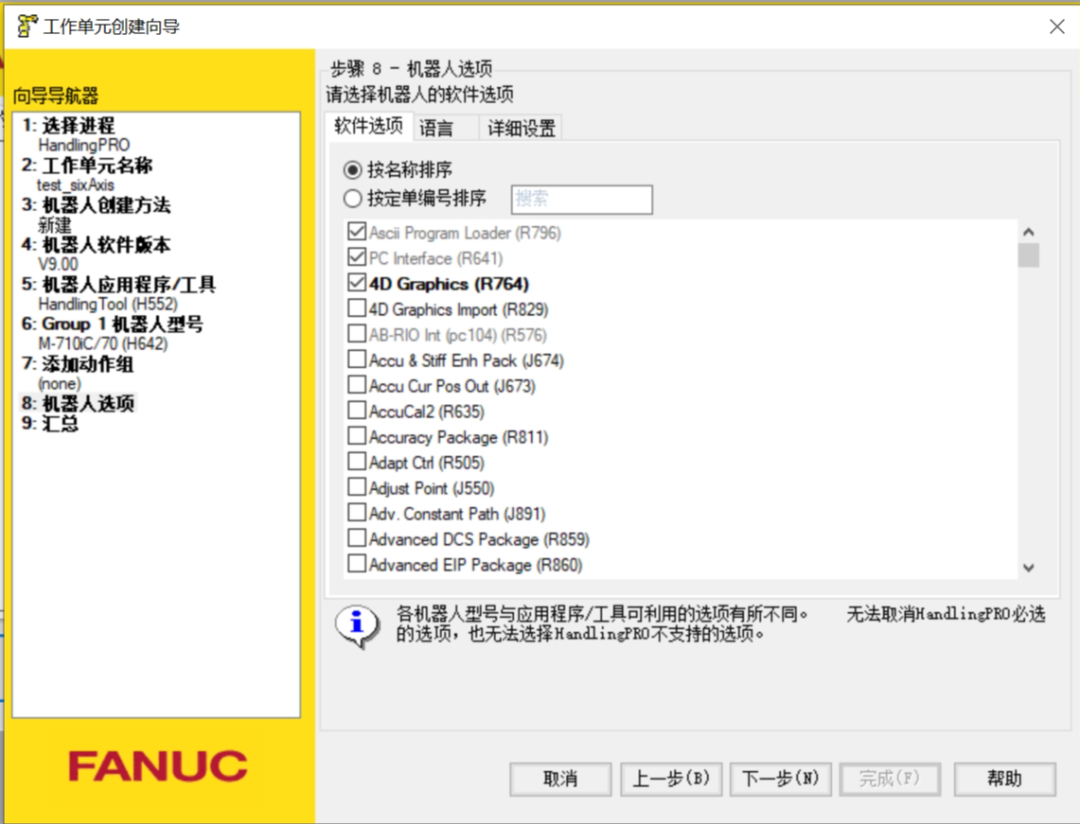
軟件選項–4D Graphics(R764)
語言–加選詞典(簡體中文)
詳細設置–標準設置
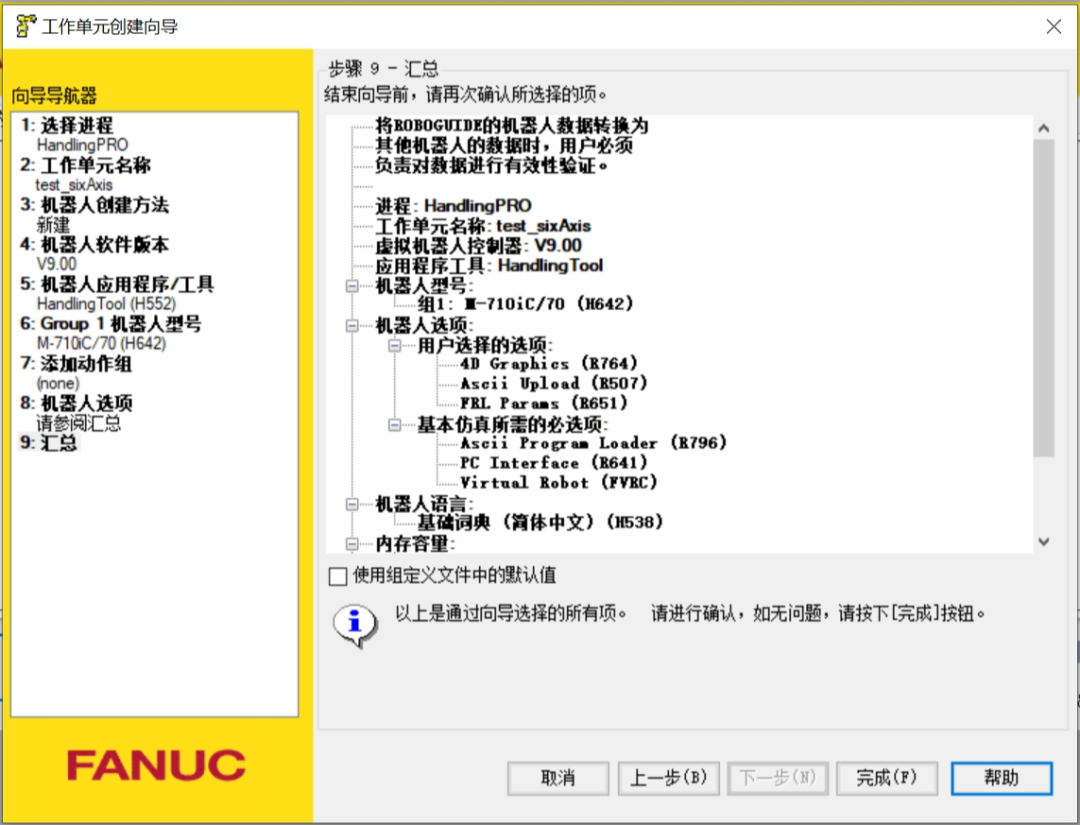
2.9 匯總,顯示當前設置和選擇的所有參數,點擊完成;
03等待軟件生成,完成創建
等待軟件生成
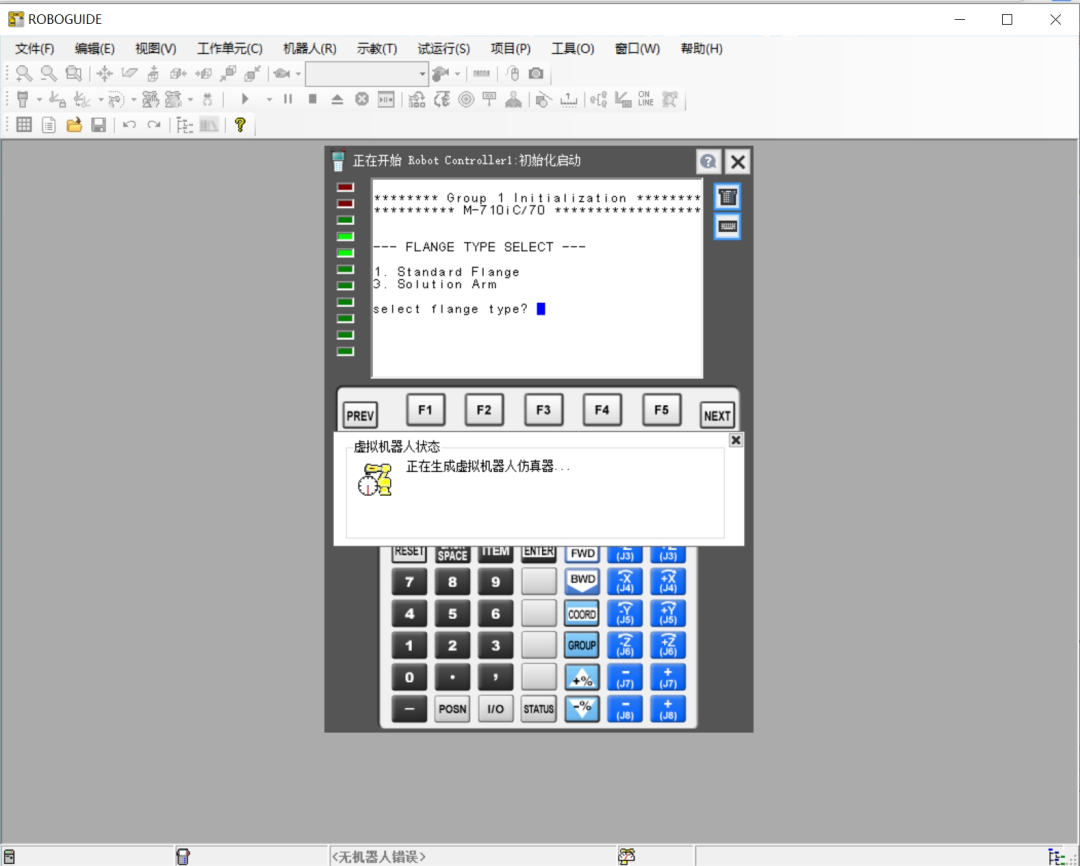
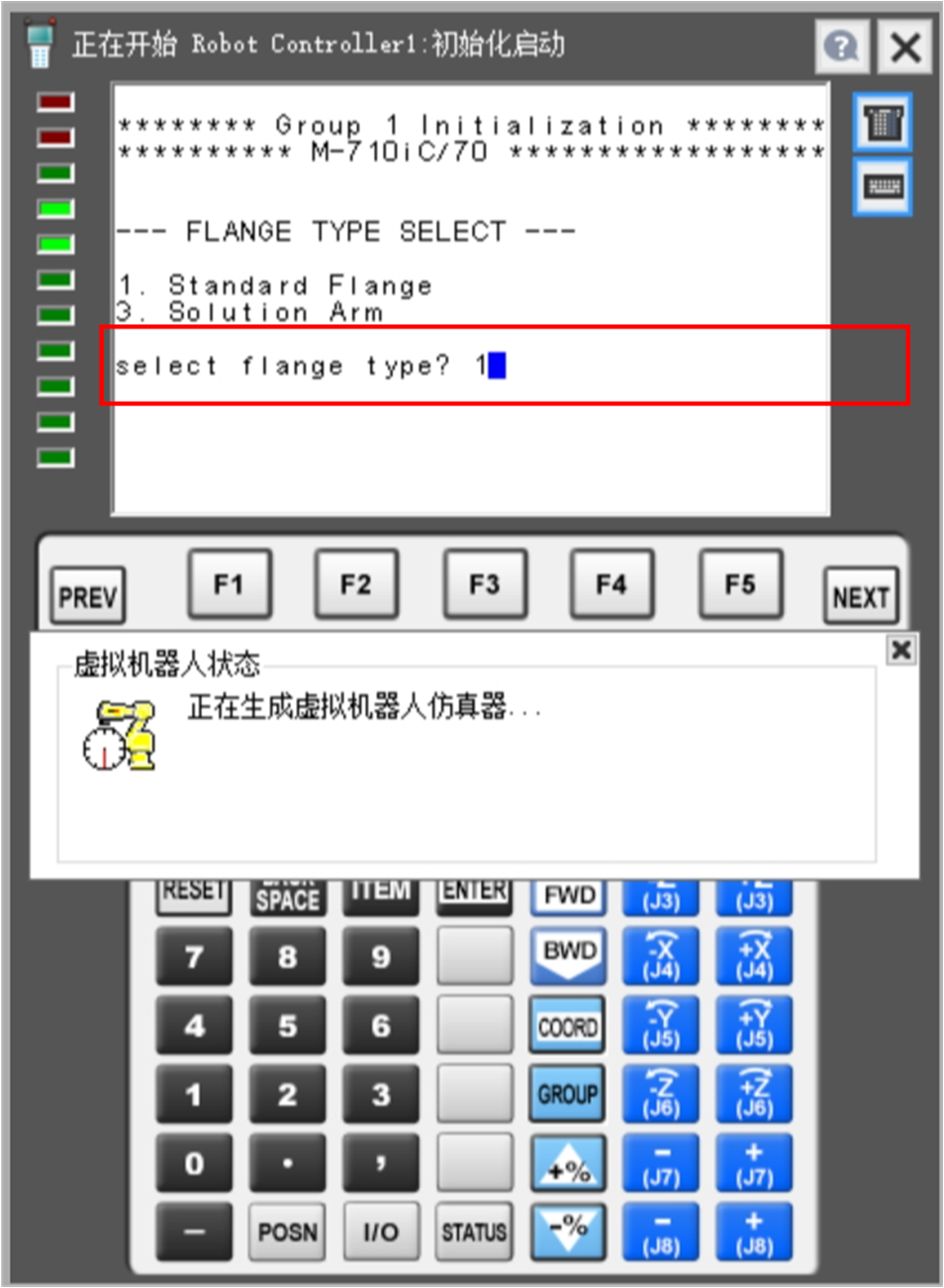
輸入選項1,然后點擊鍵盤回車,等待初始化;
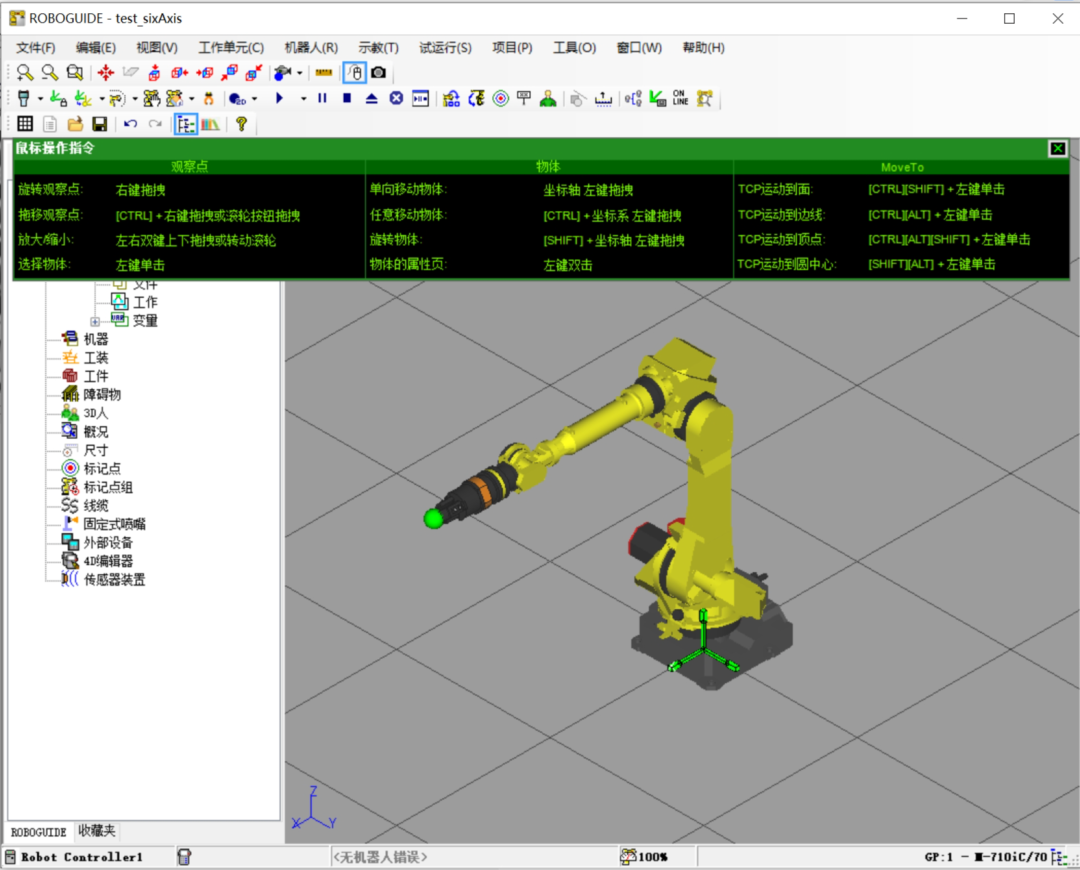
完成創建
-
機器人
+關注
關注
213文章
31075瀏覽量
222199 -
仿真
+關注
關注
54文章
4482瀏覽量
138256 -
發那科
+關注
關注
5文章
105瀏覽量
14764 -
Roboguide
+關注
關注
0文章
3瀏覽量
1748
原文標題:發那科ROBOGUIDE軟件入門-創建項目(文末附軟件免費領取地址)
文章出處:【微信號:指南車機器人科技,微信公眾號:指南車機器人科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
疆鴻智能EtherCAT轉DeviceNet,發那科機器人融入倍福的“焊接紅娘”

探索Xilinx Kria KR260機器人入門套件:開啟機器人應用開發新旅程
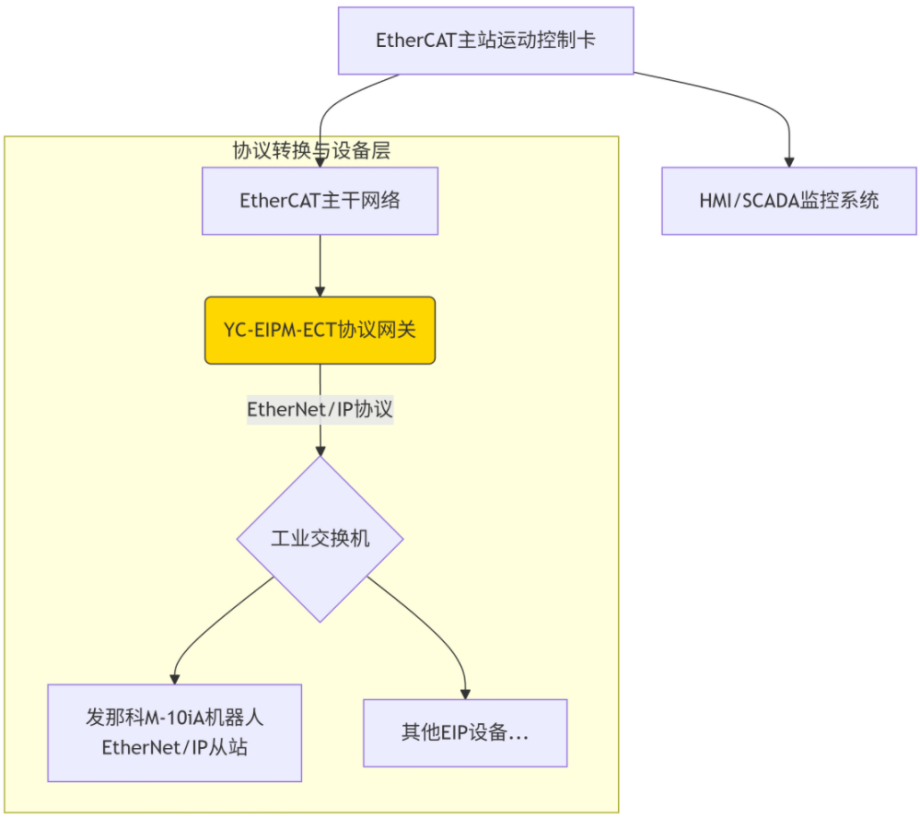
發那科機器人借助EtherNet/IP轉EtherCAT網關,實現與EtherCAT運動卡的高效互聯案例
發那科推出全新M-710iD系列六軸多功能機器人
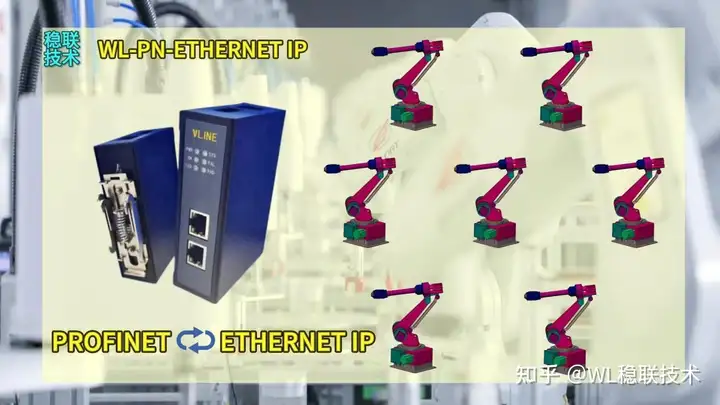
機器人通信的貼身翻譯,PROFINET轉Ethercat網關的高能玩法
工業機器人的特點
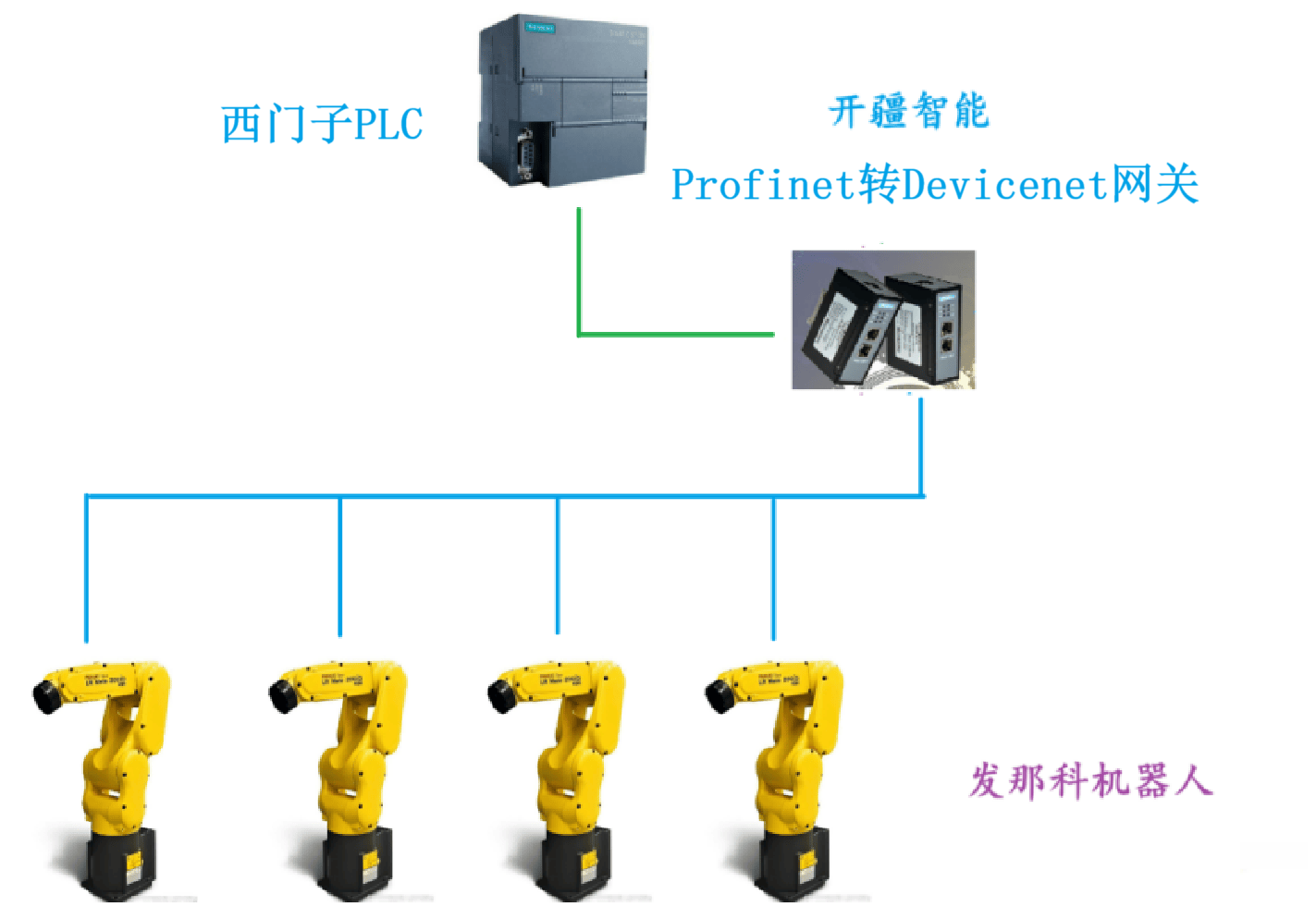
開疆智能Profinet轉Devicenet網關連接發那科機器人配置案例
工業機器人與協作機器人概念不同

速看!發那科機器人做為profinet轉ethernetip主站參數設置,每步都關鍵

盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
EtherCAT轉EtherNet/IP協議轉換網關實現歐姆龍 NJ PLC與發那科機器人連接通訊的配置案例

發那科機器人A型控制柜急停板安全回路接線方法
從“零”到“聯”:Profinet轉Ethernet/IP網關搞定發那科機器手臂



 工商網監
工商網監
評論