") 基于移動自回歸的時序擴(kuò)散預(yù)測模型
基于移動自回歸的時序擴(kuò)散預(yù)測模型

在人工智能領(lǐng)域,目前有很多工作采用自回歸方法來模擬或是替代擴(kuò)散模型,其中視覺自回歸建模(Visual AutoRegressive modeling,簡稱 VAR)就是其中的典型代表,該工作利用自回歸取得了比傳統(tǒng)基于噪聲的擴(kuò)散模型更好的生成效果,并且獲得了人工智能頂級會議 NeurIPS 2024 的 best paper。
然而在時間序列預(yù)測領(lǐng)域,當(dāng)前主流的擴(kuò)散方法還是傳統(tǒng)的基于噪聲的方法,未能充分利用自回歸技術(shù)實現(xiàn)時間序列建模。
近期,來自上海交通大學(xué)和東方理工的研究團(tuán)隊推出了自回歸移動擴(kuò)散(Auto-Regressive Moving Diffusion,簡稱 ARMD)模型。ARMD 模型受經(jīng)典的自回歸移動平均(ARMA)理論啟發(fā),重新定義了時間序列的擴(kuò)散過程:如圖一所示,與傳統(tǒng)的基于噪聲的擴(kuò)散方法不同,
ARMD 將時間序列的演進(jìn)看成是一個擴(kuò)散過程,并采用了基于鏈?zhǔn)綌U(kuò)散的方式。它的前向過程由未來序列擴(kuò)散到歷史序列,并根據(jù)擴(kuò)散步數(shù)通過滑動序列的操作生成中間狀態(tài);反向過程則通過歷史序列‘采樣’生成未來序列,實現(xiàn)了采樣和預(yù)測目標(biāo)的統(tǒng)一。
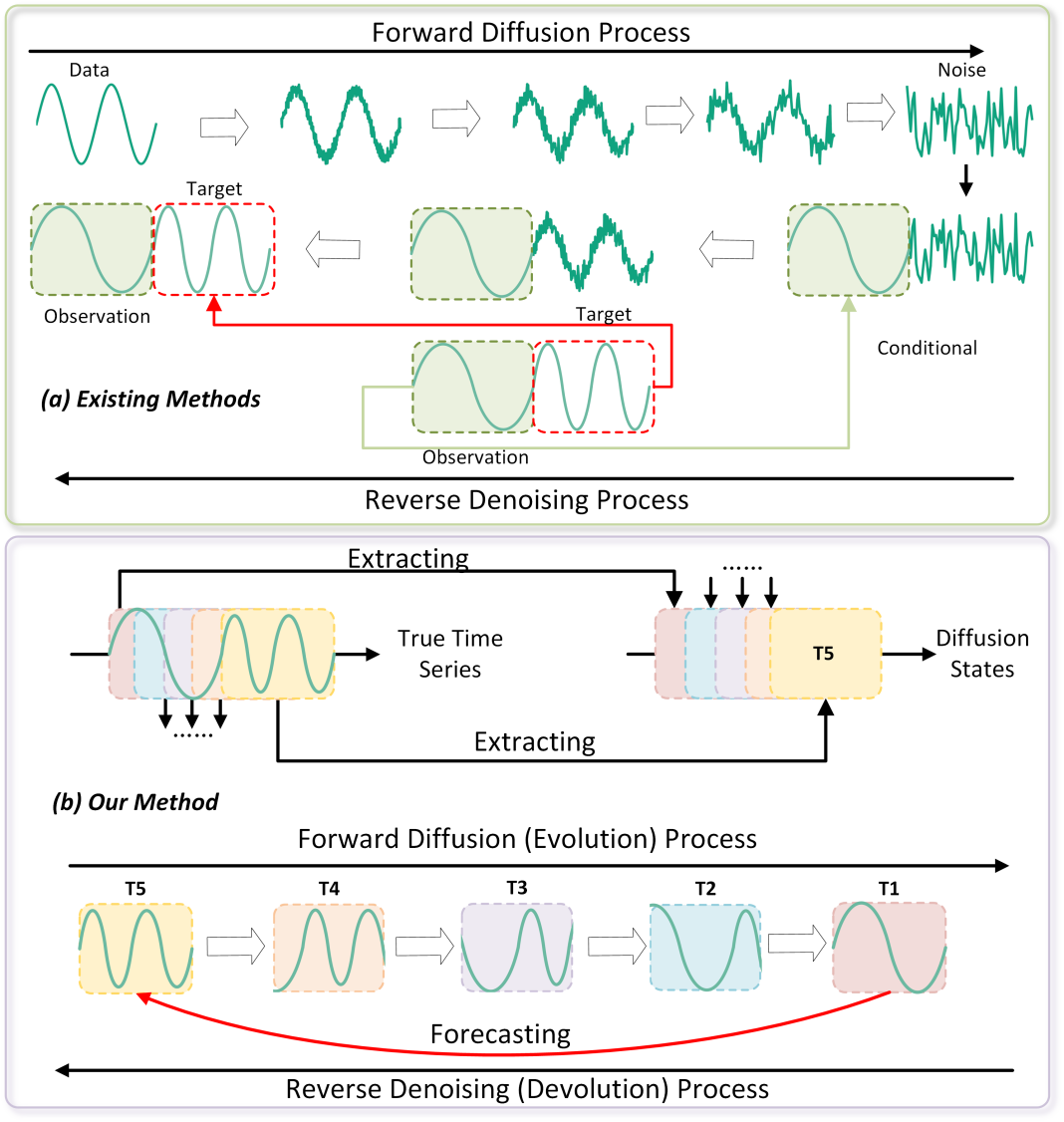
▲ 圖1. 已有的基于噪聲的時序擴(kuò)散方法和ARMD的時序擴(kuò)散方法對比
相比于傳統(tǒng)基于擴(kuò)散的時序模型,ARMD 并沒有將時間序列預(yù)測視為從噪聲起步的條件生成任務(wù),而是充分利用時間序列數(shù)據(jù)的連續(xù)演化特性,實現(xiàn)了擴(kuò)散機(jī)制與時間序列連續(xù)性之間的對齊,從而提升了模型性能。
該項研究以《Auto-Regressive Moving Diffusion Models for Time Series Forecasting》為題,被 AAAI 2025 接收。
論文題目:
Auto-Regressive Moving Diffusion Models for Time Series Forecasting
論文鏈接:
https://arxiv.org/abs/2412.09328
代碼鏈接:
https://github.com/daxin007/ARMD
方法介紹 針對時序預(yù)測任務(wù),該研究用歷史序列去預(yù)測未來序列,其中 L 為歷史序列的長度,T 為未來序列的長度。在該任務(wù)中,研究人員將歷史序列的長度設(shè)置為與未來序列相同,即。 在 ARMD 中,時間序列的演進(jìn)被概念化為一個擴(kuò)散過程,時間序列的每一步都可以看成是擴(kuò)散模型的一個狀態(tài),如圖二所示。 未來序列(下標(biāo)表示在序列中的位置,上標(biāo)表示在擴(kuò)散模型中的狀態(tài))作為前向擴(kuò)散(演進(jìn))過程的初始狀態(tài),而歷史序列則是最終狀態(tài)。 不同于傳統(tǒng)方法逐漸添加噪聲生成中間狀態(tài),ARMD 通過對進(jìn)行滑動操作來生成中間狀態(tài)(序列),使其逐漸接近歷史序列。 這一過程不僅保持了時間序列的連續(xù)性,還確保每個中間狀態(tài)反映了時間序列演進(jìn)的特定階段。由初始狀態(tài)到中間狀態(tài)添加的內(nèi)容可以定義為演進(jìn)趨勢,類似于傳統(tǒng)擴(kuò)散模型中的噪聲。 反向去噪(逆演進(jìn))過程則利用歷史序列來迭代生成(預(yù)測)未來序列。ARMD 采用了一個基于距離的去噪(逆演進(jìn))網(wǎng)絡(luò),根據(jù)中間狀態(tài)和時間步 t 得到時間序列的演進(jìn)趨勢。
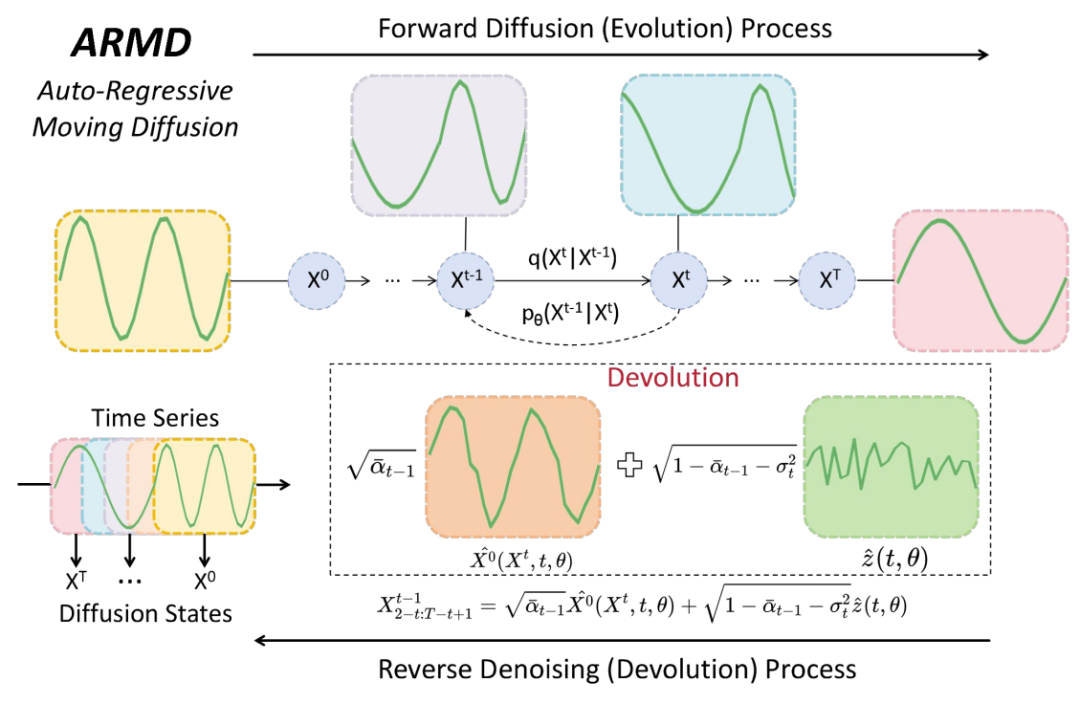
▲ 圖2. ARMD 擴(kuò)散模型示意圖。在前向擴(kuò)散(演進(jìn))過程中,未來序列逐漸被轉(zhuǎn)化為歷史序列。相反,反向去噪(反演進(jìn))過程則利用歷史序列迭代地生成 / 預(yù)測未來序列。
在最終的采樣(預(yù)測階段),ARMD 從歷史序列開始,迭代生成對未來序列的預(yù)測,使采樣過程和最終的時間序列預(yù)測目標(biāo)對齊,從而使 ARMD 成為無條件的時序擴(kuò)散模型。采樣過程遵循 DDIM(Denoising Diffusion Implicit Models)的方法,用預(yù)測的演進(jìn)趨勢替代傳統(tǒng)擴(kuò)散模型中預(yù)測的噪聲,并通過逐步去噪(反演進(jìn))得到對模型的最終預(yù)測。
模型結(jié)果 經(jīng)過在七個廣泛使用的時序預(yù)測數(shù)據(jù)集上的大量實驗,ARMD 模型的表現(xiàn)超越了現(xiàn)有的基于擴(kuò)散的時間序列預(yù)測模型,并且和最先進(jìn)的端到端時間序列預(yù)測模型取得了相當(dāng)?shù)男ЧDP偷念A(yù)測結(jié)果如表一和表二所示:
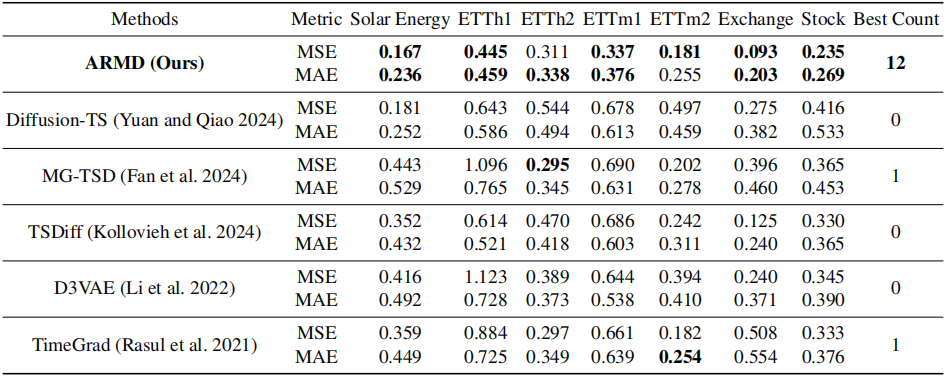
▲ 表1. 時間序列預(yù)測實驗之與基于擴(kuò)散的時間序列預(yù)測基準(zhǔn)模型的結(jié)果比較。最佳結(jié)果以粗體突出顯示。“最佳次數(shù)” 列表明模型取得最佳結(jié)果的次數(shù)。
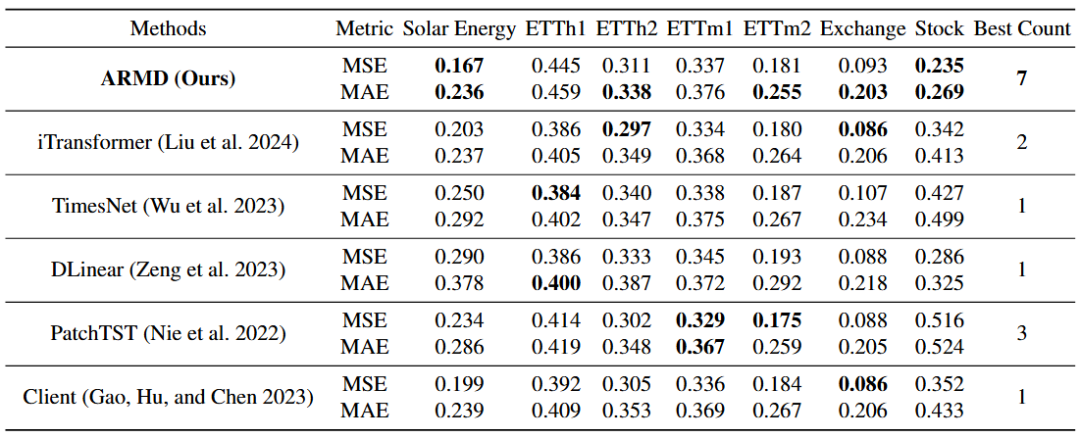
▲ 表2. 時間序列預(yù)測實驗之與端對端時間序列預(yù)測基準(zhǔn)模型的結(jié)果比較。最佳結(jié)果以粗體突出顯示。“最佳次數(shù)” 列表明模型取得最佳結(jié)果的次數(shù)。 另外,由于擴(kuò)散過程的優(yōu)化,ARMD 模型在訓(xùn)練推理時間和預(yù)測的穩(wěn)定性方面相對于之前的時序擴(kuò)散模型也有明顯的優(yōu)勢。ARMD 模型的預(yù)測效果示例如圖三所示:ARMD 在具有明顯周期性或趨勢特征的時間序列上展現(xiàn)了卓越的預(yù)測性能,能夠有效地捕捉這些時間序列中的相關(guān)特征,且相對于其他擴(kuò)散模型預(yù)測更加穩(wěn)定。
總結(jié)綜上所述,Auto-Regressive Moving Diffusion (ARMD) 模型通過重新詮釋時間序列的擴(kuò)散過程,結(jié)合時間序列的自回歸特性,成功彌合了擴(kuò)散機(jī)制與時間序列預(yù)測目標(biāo)之間的差距。 不同于傳統(tǒng)方法從白噪聲開始逐步添加噪聲,ARMD 采用鏈?zhǔn)綌U(kuò)散策略,通過滑動操作將未來序列逐漸轉(zhuǎn)化為歷史序列,更準(zhǔn)確地模擬時間序列的演化路徑。該模型還引入了獨(dú)特的反向去噪(逆演化)過程,利用歷史序列迭代生成(預(yù)測)未來序列,有效捕捉時間序列的特征。實驗結(jié)果和理論分析共同證明了 ARMD 作為一種穩(wěn)健且有效的時間序列預(yù)測方案的巨大潛力。
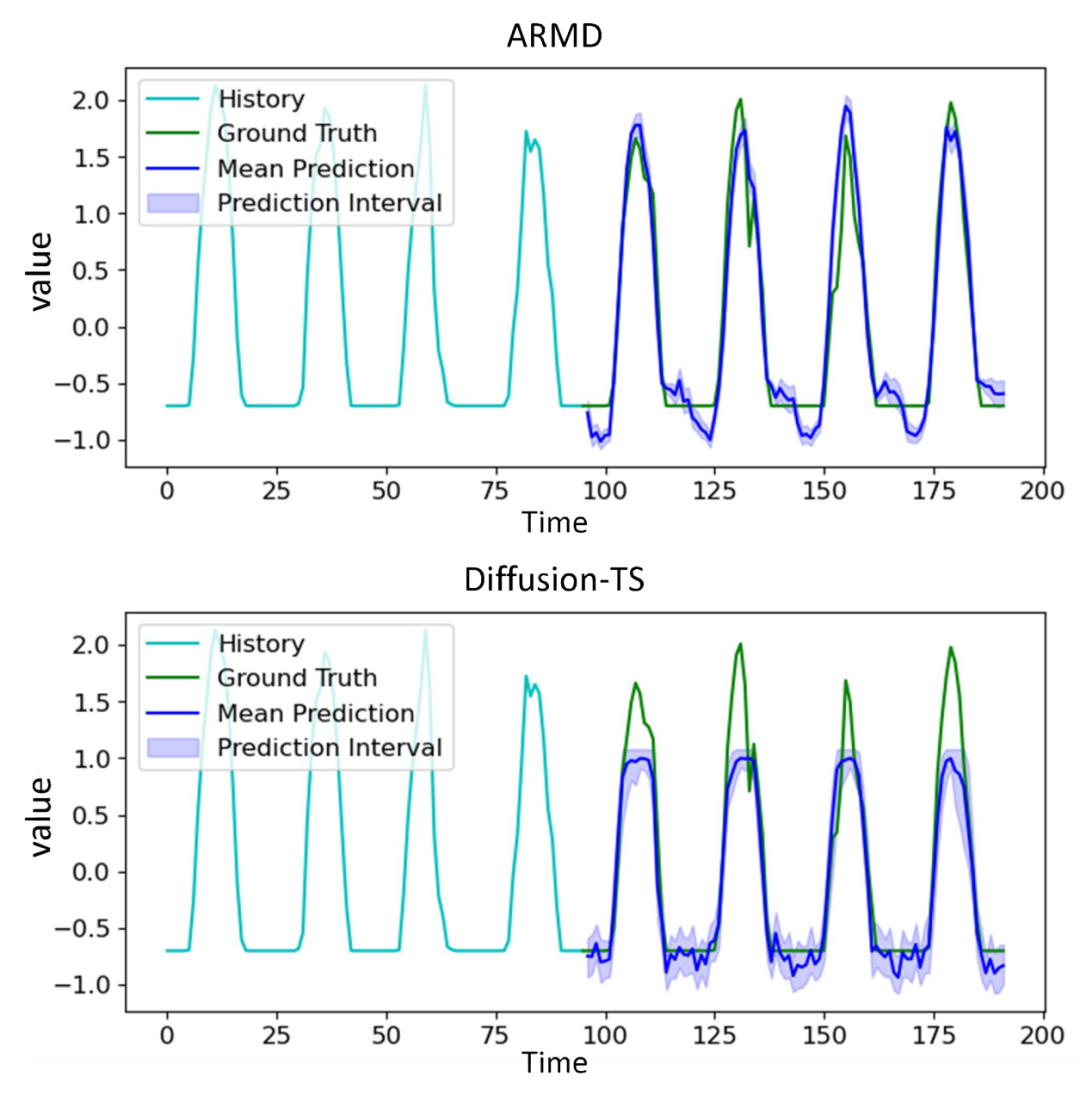
▲ 圖3. ARMD 和 Diffusion-TS 在給定相同歷史序列的情況下,分別做出的 10 次不同預(yù)測的分布情況。ARMD 實現(xiàn)了更穩(wěn)定且準(zhǔn)確的預(yù)測。
-
人工智能
+關(guān)注
關(guān)注
1819文章
50231瀏覽量
266601 -
時序
+關(guān)注
關(guān)注
5文章
411瀏覽量
38970 -
模型
+關(guān)注
關(guān)注
1文章
3805瀏覽量
52230
原文標(biāo)題:AAAI 2025 | 時間序列演進(jìn)也是種擴(kuò)散過程?基于移動自回歸的時序擴(kuò)散預(yù)測模型
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
端子電流循環(huán)壽命試驗機(jī)核心算法解析:溫升預(yù)測模型與壽命衰減曲線擬合

線性回歸的類型和應(yīng)用

算法工程師需要具備哪些技能?
大模型實戰(zhàn)(SC171開發(fā)套件V3)2026版
從數(shù)據(jù)到模型:如何預(yù)測細(xì)節(jié)距鍵合的剪切力?
大模型賦能物資需求精準(zhǔn)預(yù)測與采購系統(tǒng)軟件平臺
大模型賦能物資需求精準(zhǔn)預(yù)測與采購系統(tǒng):功能特點與平臺架構(gòu)解析
世界模型是讓自動駕駛汽車?yán)斫馐澜邕€是預(yù)測未來?

4種神經(jīng)網(wǎng)絡(luò)不確定性估計方法對比與代碼實現(xiàn)

基于全局預(yù)測歷史的gshare分支預(yù)測器的實現(xiàn)細(xì)節(jié)
普強(qiáng)用大模型重塑TTS語音合成新高度
晶圓切割深度動態(tài)補(bǔ)償?shù)闹悄軟Q策模型與 TTV 預(yù)測控制



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論