 多種傳感器集成,IMU助力無人機穩定飛行
多種傳感器集成,IMU助力無人機穩定飛行

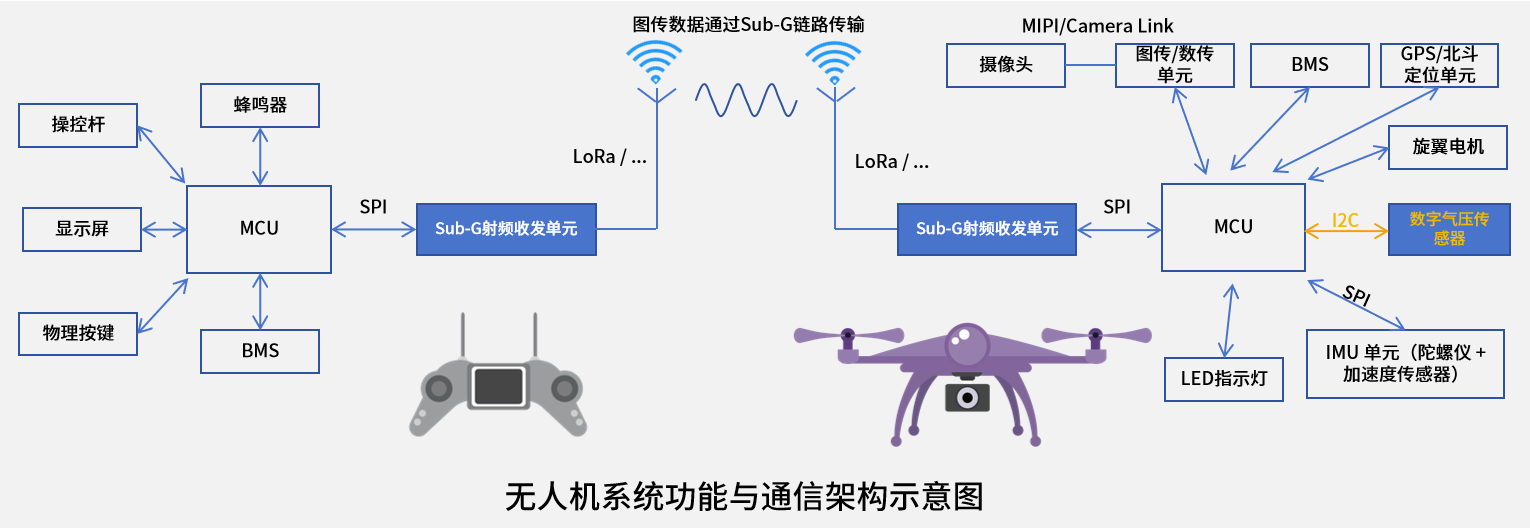
傳感器是無人機飛行控制系統的核心組件,負責采集無人機及周圍環境的數據,例如無人機的位置、速度、姿態等信息。
常見的傳感器包括[陀螺儀]、加速度計、磁力計(指南針)、氣壓計(高度計)和GPS模塊,大多數IMU只集成陀螺儀和加速度計。
我們現有一款IMU ER-MIMU-16,將陀螺儀、加速度計、磁力計與氣壓計等傳感器集成于一體,非常適合無人機。
多種高性能傳感器集成
陀螺儀:動態測量范圍±450o/s,零偏不穩定性0.3o/h,角速度隨機游走0.15o/√h;
加速度計:動態測量范圍±30g,零偏不穩定性10ug,偏置重復性為100ug;
陀螺儀與加速度計提供的角速度和加速度數據,通過系統計算可獲得無人機姿態、速度、位移等信息。
磁力計:動態測量范圍±2.5Gauss,測量所承受磁場的數據,提供磁北方向。
氣壓計:壓力范圍450~1100mbar,通過測量大氣壓強,提供的數據能協助飛控系統導航無人機上升到所需的高度。
[IMU]提供的數據能幫助飛控系統實時監測無人機姿態變化,實現穩定性控制。
陜西艾瑞科慣性技術有限公司 https://www.ericcotech.com/
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791339 -
無人機
+關注
關注
236文章
11300瀏覽量
195677 -
IMU
+關注
關注
6文章
417瀏覽量
47879
發布評論請先 登錄
相關推薦
熱點推薦
無人機操控核心:智能飛行的技術引擎
。 技術架構:三層協同設計 無人機的操控核心可分為硬件層、算法層和應用層。硬件層以飛控單元(FCU)為中心,集成IMU(慣性測量單元)、GNSS(全球導航衛星系統)模塊、氣壓計等傳感器
無人機如何靠陀螺儀保持穩定飛行?
在無人機的飛行過程中,你是否好奇它是如何保持穩定、精準轉向甚至抵抗風力干擾的?答案就藏在它的“神經中樞”——ER-3MG-043三軸陀螺儀中。這款高性能傳感器憑借卓越的角速度測量能力,

MEMS陀螺如何成為無人機穩定飛行的核心?
控進行姿態解算和維持飛行穩定的關鍵依據。 ER-3MG-103 MEMS三軸陀螺儀,正是為滿足現代無人機嚴苛要求而生的高性能傳感器。它如何奠定穩定
為什么IMU是無人機穩定控制的的核心?
在無人機從消費級向工業級/行業級跨越的過程中,"精準" 與 "穩定" 成為核心競爭力,這依賴于底層慣性測量技術的突破。IMU是無人機穩定控制
使用高精度IMU對無人機系統有何提升?
在無人機自主飛行的核心技術鏈條中,慣性測量單元(IMU)的精度與可靠性直接決定了整機的控制上限。高精度IMU對無人機系統的提升是全方位的,尤
IMU 能為無人機提供什么數據?
無人機在進行任何形式的飛行時,必須了解空中平臺的方向、其運動的性質以及飛行方向。
通常用于測量此運動的是IMU,IMU提供
為什么高端無人機不會在IMU精度上妥協?
姿態控制精度與系統集成度現已成為制約無人機性能提升的關鍵瓶頸。無人機通過IMU集成的陀螺儀與加速度計,實現對三維空間姿態(角速度、加速度)數
適用于無人機的 IMU 有哪些要求?
慣性測量單元(IMU)作為無人機飛行時運動感知的核心部件,它通過整合陀螺儀、加速度計,有時還包括磁力計、氣壓計等多種傳感器的數據,全面掌握

優化無人機航向控制的核心:IST8310飛控地磁傳感器解析
飛控上的地磁傳感器,也稱為指南針或磁羅盤,在無人機飛行控制系統中扮演著至關重要的角色。其主要作用如下:一、測量航向與方向地磁傳感器能夠根據地磁向量,求出

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
為助力開發者迅速掌握『KaihongOS輕量系統開發技術』與『星閃無線通信技術』,實現快速上手與深度體驗,“開鴻Developer社區”攜手“電子發燒友”再次聯合推出《手把手教你做星閃無人機
發表于 03-18 10:33
無人機傳感器線圈的設計與制造工藝詳解
無人機傳感器線圈是實現無人機精準控制、數據傳輸和智能感知的關鍵部件。隨著無人機技術的快速發展,傳感器線圈在導航系統、動力控制、無線通信等方面



 工商網監
工商網監
評論