 AUTOSAR通信與CAN協議的關系
AUTOSAR通信與CAN協議的關系

AUTOSAR通信模型:
AUTOSAR定義了一個分層的軟件架構,其中包括應用層、基礎軟件層和微控制器抽象層。在這些層中,通信模型是實現ECU之間通信的關鍵部分。AUTOSAR通信模型基于事件和信號的概念,允許應用層組件(如軟件組件和ECU抽象層)通過定義良好的接口進行通信。
1. 通信服務:
AUTOSAR提供了一系列通信服務,包括復雜驅動通信(COM)、網絡管理(NM)、診斷通信(DCM)和CAN通信(CAN)。這些服務確保了不同ECU之間數據的有效傳輸。
2. 信號和事件:
在AUTOSAR中,信號是ECU之間傳輸的數據的基本單位,而事件則是觸發信號傳輸的機制。這種基于事件的通信模型提高了系統的響應性和效率。
CAN協議:
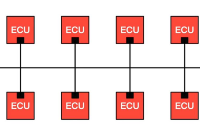
CAN協議是一種用于車輛內部網絡的通信協議,它允許多個ECU通過共享的雙絞線傳輸數據。CAN協議的關鍵特性包括:
1. 消息和幀:
CAN協議定義了消息和幀的概念。消息是ECU之間傳輸的數據包,而幀是實際在物理介質上傳輸的數據單元。
2. 仲裁和錯誤處理:
CAN協議具有基于優先級的仲裁機制,確保高優先級的消息能夠優先傳輸。此外,它還具有強大的錯誤檢測和處理能力,確保通信的可靠性。
AUTOSAR與CAN的集成:
AUTOSAR通信模型與CAN協議的集成是通過AUTOSAR的CAN通信服務實現的。這個服務提供了一個抽象層,允許AUTOSAR應用層組件與底層的CAN硬件接口進行通信。
1. CAN驅動:
AUTOSAR定義了CAN驅動,這是一個軟件組件,負責管理CAN硬件接口,并提供與AUTOSAR通信服務的接口。
2. CAN網絡管理:
網絡管理服務(NM)負責監控和管理CAN網絡上的ECU狀態。它確保ECU在啟動時能夠正確地加入網絡,并在運行時保持網絡的穩定性。
3. 信號和消息映射:
在AUTOSAR中,信號和事件被映射到CAN消息和幀。這種映射確保了AUTOSAR通信模型的抽象性,同時允許開發者利用CAN協議的高效性和可靠性。
案例研究:
為了更好地理解AUTOSAR通信與CAN協議的關系,我們可以考慮一個實際的案例。例如,在現代汽車中,發動機控制單元(ECU)和車身控制模塊(BCM)需要頻繁地交換信息。AUTOSAR通信模型允許這些ECU通過定義的接口發送和接收信號,而CAN協議則確保這些信號在物理層面上可靠地傳輸。
1. 發動機控制單元(ECU):
發動機ECU負責監控和控制發動機的性能。它需要從BCM接收關于車輛狀態的信息,如車門是否關閉,以及發送關于發動機狀態的信號。
2. 車身控制模塊(BCM):
BCM負責監控車輛的車身系統,如門鎖和窗戶。它需要從發動機ECU接收關于發動機狀態的信號,并發送關于車身狀態的信號。
3. 通信過程:
在AUTOSAR通信模型中,發動機ECU和BCM定義了需要交換的信號和事件。然后,這些信號和事件被映射到CAN消息和幀。CAN協議確保這些消息在ECU之間可靠地傳輸。
-
微控制器
+關注
關注
49文章
8783瀏覽量
165380 -
通信
+關注
關注
18文章
6436瀏覽量
140225 -
AUTOSAR
+關注
關注
11文章
405瀏覽量
23737 -
CAN協議
+關注
關注
1文章
42瀏覽量
13207
發布評論請先 登錄
CAN協議的深度剖析

機器人通信協議EtherCAT和CAN如何選擇
車載以太網通信協議棧如何測?UT和SP聯手!

CAN網關的協議棧架構分析及性能優化策略

直流電源的 CAN 通信設置與實踐
基恩士PLC使用EtherNet/IP協議通過EtherNet/IP轉CAN協議轉換網關與CAN協議IO卡通訊案例


如何實現安全的AUTOSAR通信棧
RT-Thread睿賽德正式加入AUTOSAR 組織,成為開發合作伙伴!

【干貨】一文帶你了解CAN、Modbus與LoRa三種通信協議的區別

CAN XL通信技術在車載毫米波雷達中的應用(2)

打破協議壁壘,CAN轉EtherCAT連接工業相機秒變跨國CP”!
從手寫代碼到AUTOSAR工具鏈:J1939Tp應用篇
一文讀懂CAN XL協議



 工商網監
工商網監
評論