") 視頻融合×室內(nèi)定位×數(shù)字孿生
視頻融合×室內(nèi)定位×數(shù)字孿生

隨著物聯(lián)網(wǎng)技術(shù)的迅猛發(fā)展,室內(nèi)定位與視頻融合技術(shù)在各行各業(yè)中得到了廣泛應(yīng)用。不僅能夠提供精確的位置信息,還能通過實(shí)時視頻監(jiān)控實(shí)現(xiàn)全方位數(shù)據(jù)的可視化。
與此同時,數(shù)字孿生等技術(shù)的興起為智慧城市、智慧工廠等應(yīng)用提供了強(qiáng)大支持,使得復(fù)雜系統(tǒng)的數(shù)字化管理成為可能。通過結(jié)合三維可視化及室內(nèi)定位,視頻融合、鷹眼 AR、視頻拼接等技術(shù),為決策提供更直觀的數(shù)字化視角,推動了相關(guān)領(lǐng)域的快速發(fā)展。
圖撲軟件(Hightopo) 的自主研發(fā)產(chǎn)品 HT for Web 能夠?qū)⒁曨l監(jiān)控與室內(nèi)定位技術(shù)融合,進(jìn)行高效的可視化項(xiàng)目搭建,輕松實(shí)現(xiàn)視頻與定位數(shù)據(jù)的動態(tài)展示與交互,打造一個功能強(qiáng)大、直觀易用的視頻孿生可視化監(jiān)控系統(tǒng)。
視頻融合
視頻融合的概念:
視頻融合的概念:視頻融合技術(shù)是虛擬現(xiàn)實(shí)技術(shù)的一個分支,也是虛擬現(xiàn)實(shí)技術(shù)發(fā)展的一個重要階段。它通過將來自不同視頻源的信息與 3D 場景進(jìn)行整合,生成一個連貫、無縫、并且虛實(shí)結(jié)合的新場景。這種技術(shù)不僅增加了虛擬場景與現(xiàn)實(shí)的互動性,還減小了計(jì)算機(jī)模型中信息的不確定因素,提高了虛擬模型的信息承載量。
傳統(tǒng)的視頻監(jiān)控通常將所有視頻以網(wǎng)格化方式展示在大屏或網(wǎng)頁上,雖然可以讓監(jiān)控人員同時查看多個視頻源,但長時間觀看容易導(dǎo)致疲勞和注意力下降。此外,若監(jiān)控人員對攝像頭布局不熟悉,在突發(fā)事件(如發(fā)現(xiàn)可疑人員活動)中,可能無法快速感知現(xiàn)場情況,進(jìn)而無法立即進(jìn)行準(zhǔn)確定位和反應(yīng)。
圖撲軟件擁有獨(dú)立研發(fā)的 2D 和 3D 圖形引擎 HT for Web,充分利用其在 3D 渲染上的強(qiáng)大功能,結(jié)合自定義 Shader,打造了處理視頻融合的插件,顯著提升了視頻的流暢性和視覺效果。該插件支持添加視頻到 3D 場景中,并通過顏色矯正、幾何校正、裁切、羽化、顏色剔除等手段將視頻完美融入周圍環(huán)境。在應(yīng)用過程中,利用視頻分布式布局的特點(diǎn),結(jié)合視角位置,可在一個場景中支持超多路視頻。
視頻融合的基本流程
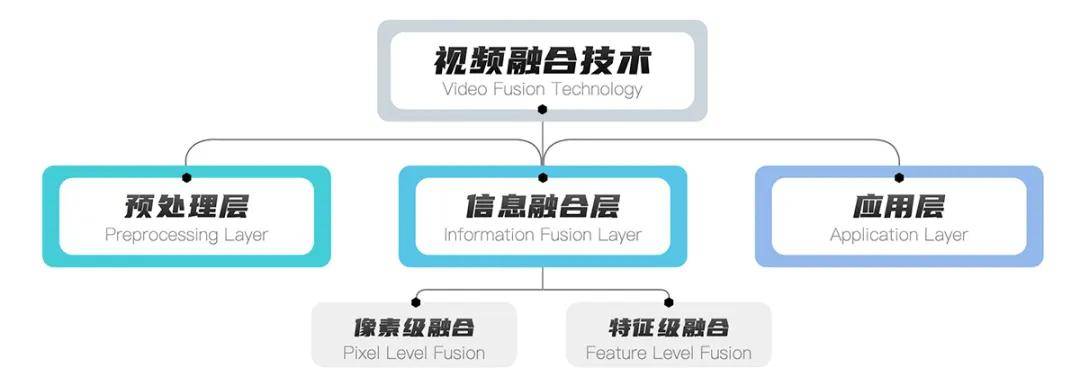
視頻融合技術(shù)一般可以分為三個層次:預(yù)處理、信息融合與應(yīng)用層。
預(yù)處理層:對視頻圖像進(jìn)行幾何校正、噪聲消除、色彩亮度調(diào)整和配準(zhǔn)。通過找到視頻與三維場景或相鄰視頻間的最大相關(guān),消除圖像在空間、相位和分辨率等方面的差異,實(shí)現(xiàn)更準(zhǔn)確的信息融合。
信息融合層:即視頻圖像的與 3D 場景的融合過程。這一層可以根據(jù)智能度的不同,分為像素級和特征級:
像素級融合:主要用于多視頻的像素拼接融合,使多個圖像成為一個整體。
特征級融合:主要用于視頻與 3D 場景的融合,以明顯特征(如線條、建筑)為基礎(chǔ),實(shí)現(xiàn)圖像和三維場景的拼接。
應(yīng)用層:對融合后的視頻進(jìn)行綜合評估,并應(yīng)用于實(shí)際場景,如智慧城市的會議、監(jiān)控和輿情管理等。
圖撲 HT 視頻融合技術(shù)通過先進(jìn)的圖形圖像處理,將視頻畫面與三維場景無縫疊加。利用虛擬攝像機(jī)的位置、角度和視野對視頻信號進(jìn)行精確校準(zhǔn),確保視頻與場景的視覺效果高度一致,實(shí)現(xiàn)了逼真的視頻融合效果。視頻融合可以提供更直觀、全面的視覺信息,幫助用戶更好地理解和分析場景中的實(shí)時監(jiān)控視頻。
視頻融合應(yīng)用場景
在現(xiàn)代地鐵站的管理中,視頻融合技術(shù)與圖撲 3D 可視化的結(jié)合發(fā)揮了重要作用。
盡管三維建模和物聯(lián)網(wǎng)數(shù)據(jù)采集可以提供設(shè)備的運(yùn)行狀態(tài),但它們僅能展示系統(tǒng)的虛擬視圖,無法直觀呈現(xiàn)現(xiàn)場的真實(shí)情況。例如,當(dāng)某個設(shè)備出現(xiàn)故障導(dǎo)致人群擁堵時,僅靠虛擬數(shù)據(jù)無法反映出現(xiàn)場的緊張程度和具體布局。在這方面,視頻融合技術(shù)通過整合和呈現(xiàn)實(shí)時的現(xiàn)場視頻,為管理團(tuán)隊(duì)提供了對地鐵站內(nèi)真實(shí)環(huán)境的清晰視角。
圖撲軟件通過將三維虛擬建模與實(shí)時視頻相結(jié)合,讓管理者不僅可以監(jiān)控設(shè)備的運(yùn)行狀態(tài),還可以迅速識別并解決因設(shè)備故障引發(fā)的問題,實(shí)現(xiàn)了虛擬與現(xiàn)實(shí)的最佳結(jié)合。這種技術(shù)應(yīng)用極大提升了決策的效率和現(xiàn)場響應(yīng)能力。
更多應(yīng)用場景
視頻融合技術(shù)在多個領(lǐng)域都有廣泛的應(yīng)用,包括但不限于:
智慧城市:整合不同攝像頭和傳感器的數(shù)據(jù),為城市管理提供全面、準(zhǔn)確的信息支持。
工業(yè)生產(chǎn):將多個攝像頭畫面合并,方便監(jiān)控人員實(shí)時了解生產(chǎn)線狀況,及時發(fā)現(xiàn)并處理問題。
公共安全:在公共場所和交通樞紐,視頻融合技術(shù)提高監(jiān)控效率,快速響應(yīng)和處理異常行為。
交通管理:視頻融合技術(shù)實(shí)時監(jiān)控交通流量和交叉口情況,提高道路通行效率和交通安全。


圖撲視頻融合技術(shù)通過整合不同視頻源的信息與 3D 場景,生成一個連貫、無縫的虛實(shí)結(jié)合的新場景,提高了監(jiān)控效率和反應(yīng)速度。盡管視頻融合技術(shù)具有直觀展現(xiàn)、增強(qiáng)視頻利用價值和提升態(tài)勢掌控能力等優(yōu)點(diǎn),但也面臨技術(shù)復(fù)雜度高、設(shè)備成本高和實(shí)時性挑戰(zhàn)等問題。
圖撲將不斷創(chuàng)新研究,讓視頻融合技術(shù)朝著更高清晰度、更智能化和更實(shí)時化的方向發(fā)展,為各行各業(yè)提供更加高效、智能的解決方案。
室內(nèi)定位
在工業(yè)自動化和控制領(lǐng)域中,室內(nèi)定位技術(shù)作為一個重要的應(yīng)用擴(kuò)展,可以幫助提升生產(chǎn)效率、安全性和管理水平。室內(nèi)定位技術(shù)用于在建筑物內(nèi)部或其他封閉環(huán)境中確定物體或人員的位置,實(shí)現(xiàn)全方位的智能管理。
利用圖撲先進(jìn)的可視化技術(shù)以及結(jié)合各類室內(nèi)定位技術(shù),管理者可以實(shí)時監(jiān)控人員和設(shè)備的位置,提高運(yùn)營效率和安全性。
室內(nèi)定位的常見類型
室內(nèi)外定位技術(shù)通過多種傳感器和信號技術(shù),實(shí)現(xiàn)對室內(nèi)外物體和人員的精確定位。常見的室內(nèi)外定位技術(shù)包括:無線射頻識別(RFID)、Wi-Fi 定位、藍(lán)牙低功耗(BLE)、超寬帶(UWB)、圖像識別定位。


圖撲定位的應(yīng)用
圖撲自主研發(fā) HT for Web 2D 和 3D 圖形渲染引擎,為室內(nèi)外定位數(shù)據(jù)提供了豐富的可視化展示方式。
廠區(qū)人員定位
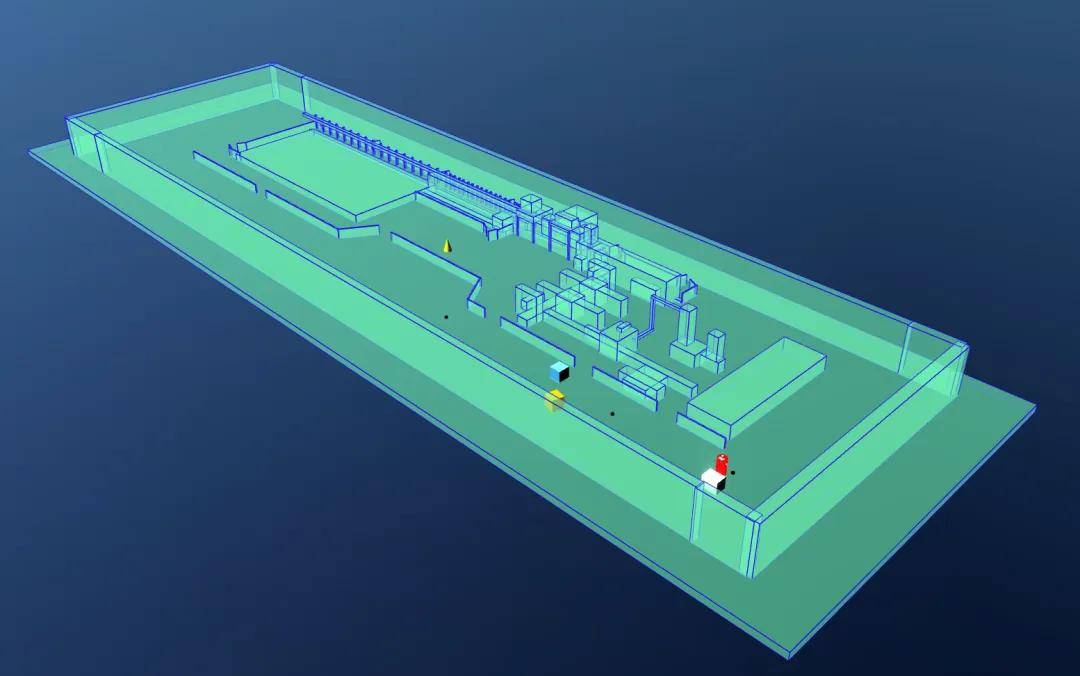
采用圖撲的 HT for Web 產(chǎn)品來構(gòu)造輕量化的 3D 可視化場景,該場景從正面展示了一個現(xiàn)代化工廠的現(xiàn)實(shí)場景,室內(nèi)定位包括工廠工人的實(shí)時位置、電子圍欄的范圍、現(xiàn)場的安全情況等等,幫助我們直觀的了解當(dāng)前工廠人員的安全狀況。
在工廠中,室內(nèi)定位技術(shù)的應(yīng)用顯著提升了運(yùn)營效率和安全性。數(shù)據(jù)經(jīng)過圖撲可視化技術(shù)處理后,以數(shù)字孿生形式呈現(xiàn),使得人員調(diào)度、設(shè)備維護(hù)和安全監(jiān)控更加精準(zhǔn)高效。
鋼廠人員安全定位
依托圖撲自研 HT for Web 產(chǎn)品,從數(shù)字孿生鋼廠出發(fā),將鋼廠廠區(qū)、設(shè)備機(jī)械、作業(yè)人員高度集中。并基于 UWB 精準(zhǔn)定位技術(shù),讓位置數(shù)據(jù)與可視化業(yè)務(wù)流程直接關(guān)聯(lián),實(shí)現(xiàn) 3D 可視化監(jiān)控車間作業(yè)人員的精準(zhǔn)定位、歷史軌跡溯源、電子圍欄監(jiān)管及異常預(yù)警告警等業(yè)務(wù)功能。形成基于 UWB 精準(zhǔn)定位的調(diào)度一體化、數(shù)據(jù)透明化、運(yùn)維智能化的監(jiān)管平臺。
異常報警一鍵定位
鋼廠環(huán)境錯中復(fù)雜,如有外來訪客或作業(yè)人員疏忽大意,導(dǎo)致錯入設(shè)備檢修區(qū)、高空作業(yè)區(qū)、大型設(shè)備作業(yè)區(qū)附近,后果不堪設(shè)想。
UWB 作為厘米級高精度人員定位技術(shù),將其與圖撲可視化場景深度融合,依照 UWB 定位系統(tǒng)傳輸?shù)亩ㄎ蛔鴺?biāo)數(shù)據(jù),在場景內(nèi)實(shí)時呈現(xiàn)人員 SOS 報警、微標(biāo)簽低電量報警、無陪同作業(yè)報警、電子圍欄越界報警等因素觸發(fā)的位置信息。確保作業(yè)人員定位坐標(biāo)精準(zhǔn)復(fù)現(xiàn)于虛擬場景之中,清晰查看人員的位置分布信息和人員數(shù)據(jù)統(tǒng)計(jì)。
室內(nèi)定位與視頻融合
可視化平臺聯(lián)合多種視覺圖像進(jìn)行 7×24h 動態(tài)監(jiān)測。并且支持疊加圖撲軟件 HT 視頻融合技術(shù),通過車間內(nèi)監(jiān)控視頻與三維場景疊加展示,可如臨其境查看現(xiàn)場情況。并實(shí)現(xiàn)關(guān)鍵路徑自動視頻巡檢,重點(diǎn)區(qū)域關(guān)注目標(biāo)快速鎖定等高級功能。
圖撲軟件視頻融合技術(shù)采用 WebGL 技術(shù),利用 GPU 高性能計(jì)算能力對視頻圖像進(jìn)行實(shí)時處理,圖像處理不占用 CPU 資源,整個方案畫面流暢。
倉儲物流園區(qū)設(shè)備定位
集合倉儲系統(tǒng)應(yīng)用物聯(lián)網(wǎng)、視頻監(jiān)控聯(lián)網(wǎng)技術(shù)、嵌入智能控制與通信模塊的物流機(jī)器人技術(shù)、RFID 托盤等技術(shù)。數(shù)字孿生物流全過程,讓物品出入庫信息可展現(xiàn),可監(jiān)控,可管理。
通過融合 HT 可視化技術(shù),園區(qū)內(nèi)的人、機(jī)、車、設(shè)備實(shí)現(xiàn)了一體互聯(lián)。這包括自動駕駛、自動分揀、自動巡檢和人機(jī)交互等整體調(diào)度及管理,進(jìn)一步搭建起智能化室內(nèi)定位的應(yīng)用場景。
設(shè)備定位
AGV 通過無線網(wǎng)絡(luò)向上位機(jī)發(fā)送當(dāng)前位置和狀態(tài),上位機(jī)根據(jù)當(dāng)前狀態(tài)更新數(shù)據(jù)庫,并同步接入 HT 可視化系統(tǒng)進(jìn)行路徑的實(shí)時展示,也可根據(jù)項(xiàng)目需求設(shè)置 AVG 行走路徑。

數(shù)字化和智能化技術(shù)在全領(lǐng)域的覆蓋,使室內(nèi)定位應(yīng)用變得越來越普及。這些技術(shù)改變了傳統(tǒng)的人工讀取和記錄信息的方式,實(shí)現(xiàn)了信息的主動“感知”。
車輛定位管理
智慧停車場的車輛定位技術(shù)極大提升了管理效率和用戶體驗(yàn)。通過使用藍(lán)牙、Wi-Fi、UWB 和物聯(lián)網(wǎng)等多種定位技術(shù),停車場管理系統(tǒng)能夠?qū)崟r跟蹤每輛車的位置。通過 HT 可視化使停車場管理更加智能化。

圖撲車輛定位可視化技術(shù)可以實(shí)時監(jiān)控車輛動向,優(yōu)化車位利用率,并在緊急情況下進(jìn)行迅速處理。智慧停車場通過數(shù)字化技術(shù)顯著提升了用戶體驗(yàn),同時提高了管理效率和安全性。

SDF 自動矯正
SDF(Signed Distance Field),高度科技自動矯正算法是一種結(jié)合視頻融合和室內(nèi)定位技術(shù)的尖端工具,旨在提升三維空間數(shù)據(jù)的精準(zhǔn)度和可靠性。碰撞檢測中,通過查詢點(diǎn)在 SDF 中的值,可以判斷該點(diǎn)是否與物體發(fā)生碰撞。
對于 3D 場景中平面的物體的碰撞檢測矯正,具體步驟如下:
1.創(chuàng)建平面的二維圖, 模型、障礙物等不可進(jìn)入?yún)^(qū)域用黑色填充,可自由移動區(qū)域用白色填充。
2.生成平面二維圖的圖片,并創(chuàng)建 SDF,黑色區(qū)域距離為負(fù),白色區(qū)域距離為正。同時記錄指向最近距離方向的向量。
3.運(yùn)行時根據(jù)模型當(dāng)前位置查詢 SDF 距離。如果距離為負(fù),根據(jù)距離向量計(jì)算出模型的矯正位置。
SDF 在圖撲的應(yīng)用
SDF 是一種常用于計(jì)算機(jī)圖形學(xué)和圖像處理中的技術(shù),用于表示和處理幾何形狀。SDF 能夠高效地描述一個形狀及其邊界,并且常用于邊界檢測、碰撞檢測、字體渲染等。
圖撲 HT 提供封裝好的插件,通過簡單配置和少量代碼即可實(shí)現(xiàn)碰撞檢測。
1.創(chuàng)建 3D 場景,將障礙物標(biāo)出來。
2.添加 HT 碰撞檢測插件。插件會根據(jù)場景中障礙物信息自動生成 SDF 黑白圖片,并保存在內(nèi)存中。
3.添加代碼處理碰撞。
結(jié)合視頻融合和室內(nèi)定位技術(shù),圖撲軟件正在引領(lǐng)智能管理和監(jiān)控的創(chuàng)新方向。這種視頻孿生綜合解決方案不僅提升了數(shù)據(jù)的可操作性和決策的科學(xué)性,還為用戶提供了更為直觀和智能的監(jiān)控體驗(yàn)。隨著技術(shù)的不斷進(jìn)步,這一領(lǐng)域?qū)⒂瓉砀訌V闊的發(fā)展前景,為智慧城市、智能工廠、智能辦公等場景帶來更多創(chuàng)新與可能。
審核編輯 黃宇
-
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2945文章
47820瀏覽量
415070 -
三維可視化
+關(guān)注
關(guān)注
0文章
304瀏覽量
9995 -
視頻融合
+關(guān)注
關(guān)注
0文章
5瀏覽量
7663 -
人員定位
+關(guān)注
關(guān)注
0文章
409瀏覽量
5385 -
數(shù)字孿生
+關(guān)注
關(guān)注
4文章
1658瀏覽量
13979
發(fā)布評論請先 登錄
北斗+AI深度融合:云翎智能RTK定位執(zhí)法儀打造鐵路作業(yè)的“數(shù)字孿生”現(xiàn)場

DW3000方案如何構(gòu)建UWB高精度室內(nèi)定位系統(tǒng)

藍(lán)牙信標(biāo)、UWB等主流室內(nèi)定位無線技術(shù)的參數(shù)對比、核心算法和選型指南詳解(二)

室內(nèi)定位無線技術(shù)的分類和原理全解析(一)
低功耗BLE+iBeacon:打造室內(nèi)定位與近場通信應(yīng)用!

藍(lán)牙室內(nèi)定位核心技術(shù)解析:RSSI 與 AOA 的測距原理對比與精度升級邏輯
常見的室內(nèi)定位技術(shù)有哪些?深度剖析UWB、藍(lán)牙定位等技術(shù)的優(yōu)劣與應(yīng)用場景

基于北斗和藍(lán)牙beacon的室內(nèi)北斗定位系統(tǒng)從原理到應(yīng)用全面詳解(一)
面對UWB室內(nèi)定位可靠性需求,網(wǎng)絡(luò)協(xié)同能力是關(guān)鍵

從軌尖到云端:云翎智能rtk高精度定位工作記錄儀構(gòu)建鐵路巡檢數(shù)字孿生
【室內(nèi)定位UWB模組】工廠人員和設(shè)備“秒定位”,高精度、高安全!
如何選擇室內(nèi)定位硬件
什么是室內(nèi)定位導(dǎo)航技術(shù)
室內(nèi)外電子工牌:北斗與藍(lán)牙融合定位的高效應(yīng)用

u-blox u-locate解決方案助力實(shí)現(xiàn)亞米級室內(nèi)定位精度



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論