") DW3000方案如何構(gòu)建UWB高精度室內(nèi)定位系統(tǒng)
DW3000方案如何構(gòu)建UWB高精度室內(nèi)定位系統(tǒng)

一、明確需求與選擇測(cè)距方法
若要實(shí)現(xiàn)室內(nèi)厘米級(jí)定位,首先要明確系統(tǒng)需求,如目標(biāo)精度、更新頻率、延遲、電池續(xù)航、空間大小和形狀等,據(jù)此選擇合適的測(cè)距方法,設(shè)定成功指標(biāo)用于后續(xù)驗(yàn)證。在 UWB 定位方面,TWR(雙向測(cè)距)是異步的,部署相對(duì)簡(jiǎn)便。綜合部署復(fù)雜度與系統(tǒng)規(guī)模等因素,本文采用基于 TWR 的 UWB 測(cè)距方案,并從工程實(shí)踐角度,系統(tǒng)性介紹基于 DW3000 的室內(nèi)定位系統(tǒng)構(gòu)建方法。
二、準(zhǔn)備物料與工具鏈
1.物料清單
錨節(jié)點(diǎn)與標(biāo)簽節(jié)點(diǎn):選用 DW3000 開(kāi)發(fā)模塊,它基于 Qorvo 的 DW3000 芯片,該芯片報(bào)告符合 IEEE 802.15.4z HRP標(biāo)準(zhǔn),并支持認(rèn)證體系所需的物理層與測(cè)距特性。對(duì)于錨節(jié)點(diǎn),可搭配 Qorvo DWM3000EVB 開(kāi)發(fā)板與 STM32 Nucleo 開(kāi)發(fā)板組合使用,再加上機(jī)載天線或外部天線;標(biāo)簽節(jié)點(diǎn)同樣可采用 DW3000 開(kāi)發(fā)模塊,配備緊湊型 FPC 以及可穿戴或手持式外殼,使用便攜式充電電源。
2.工具鏈和庫(kù)
- 編譯器和 SDK:對(duì)于 DW3000 開(kāi)發(fā)模塊,使用廠商提供的驅(qū)動(dòng)程序和示例代碼路徑,其針對(duì) DW3000 系列和 15.4z HRP 測(cè)距標(biāo)準(zhǔn),芯片制造商在視距(LOS)及完成校準(zhǔn)的典型測(cè)試條件下報(bào)告其可達(dá) 10 厘米級(jí)測(cè)距精度。
- 燒錄工具:使用 MCU 板的標(biāo)準(zhǔn)燒錄器對(duì)錨點(diǎn)和標(biāo)簽?zāi)繕?biāo)進(jìn)行編程。
- 串口控制臺(tái):通過(guò)任何可讀取日志、配置和范圍輸出的 USB 串口應(yīng)用程序進(jìn)行操作。
- 繪圖和分析:利用 Python 腳本解析日志并繪制范圍直方圖和時(shí)間線,同時(shí)保留簡(jiǎn)單的 README 文件以便重新運(yùn)行繪圖。
- 版本管理:鎖定工具鏈版本,記錄確切的 SDK 標(biāo)簽和編譯器版本,在每個(gè)里程碑后標(biāo)記固件倉(cāng)庫(kù),方便他人重新編譯。
三、模塊方案選擇建議
在系統(tǒng)選型上,基于 DW3000 芯片的開(kāi)發(fā)板更適合研發(fā)與深度定制場(chǎng)景,具備更高的調(diào)試自由度。開(kāi)發(fā)者可結(jié)合 Qorvo 官方提供的驅(qū)動(dòng)與示例代碼,對(duì) DW3000 系列進(jìn)行底層功能開(kāi)發(fā)與算法優(yōu)化,適用于對(duì)協(xié)議、測(cè)距流程或系統(tǒng)架構(gòu)有特殊需求的項(xiàng)目。
而對(duì)于需要快速部署與落地的應(yīng)用場(chǎng)景(如中小型室內(nèi)定位系統(tǒng)、原型驗(yàn)證等),更推薦使用 UWB650Pro模塊。該模塊基于 Qorvo DW3000 芯片,高度集成了射頻與控制電路,支持雙向測(cè)距(TWR)及定位方案,并支持 RSSI(接收信號(hào)強(qiáng)度指示)輔助定位。用戶(hù)無(wú)需參與芯片底層驅(qū)動(dòng)開(kāi)發(fā),僅需通過(guò) UART 接口配置參數(shù)(如傳輸速率、定位參數(shù)等),即可快速完成系統(tǒng)搭建。TWR 提供高精度測(cè)距基礎(chǔ),RSSI 可作為輔助信息(用于錨點(diǎn)篩選或測(cè)距結(jié)果加權(quán)),兩者結(jié)合能進(jìn)一步提升定位魯棒性。?
 UWB650PRO模塊尺寸
UWB650PRO模塊尺寸針對(duì) UWB 應(yīng)用中常見(jiàn)的天線延遲校準(zhǔn)問(wèn)題,思為無(wú)線已在 UWB650 PC配置軟件中預(yù)置多款常用 UWB 天線的延遲參數(shù)。用戶(hù)只需選擇對(duì)應(yīng)的天線型號(hào)并配置相關(guān)信道參數(shù),系統(tǒng)即可自動(dòng)完成校準(zhǔn),無(wú)需手動(dòng)測(cè)量與調(diào)試,即可實(shí)現(xiàn)穩(wěn)定可靠的高精度測(cè)距。
 UWB模塊天線延遲校準(zhǔn)
UWB模塊天線延遲校準(zhǔn)UWB650Pro推薦方案物料清單
類(lèi)別 | 具體內(nèi)容 |
核心模塊 | UWB650Pro :符合 IEEE 802.15.4-2020 標(biāo)準(zhǔn),支持 UART 控制接口,顯著簡(jiǎn)化系統(tǒng)開(kāi)發(fā)流程。 功能:支持2D/3D定位。MESH組網(wǎng)及ESD防護(hù),天線自動(dòng)校準(zhǔn) |
配套要求 | 天線:定制超寬帶 FPC 或 PCB 天線。 |
適用場(chǎng)景 | 適合希望快速搭建系統(tǒng)、簡(jiǎn)化開(kāi)發(fā)流程、降低開(kāi)發(fā)成本的項(xiàng)目,尤其適用于中小型室內(nèi)定位系統(tǒng)及對(duì)開(kāi)發(fā)速度和易用性要求較高的應(yīng)用場(chǎng)景。 |
開(kāi)發(fā)復(fù)雜度 | 較低。模塊已集成大部分功能,支持天線校準(zhǔn)。通過(guò) UART 接口即可完成通信與參數(shù)配置,大幅減少底層硬件與協(xié)議開(kāi)發(fā)工作量。 |
天線與外殼 | 錨節(jié)點(diǎn):采用超寬帶 FPC 或 PCB 天線,通常安裝于天花板或高位位置。 |
 UWB模塊天線
UWB模塊天線四、組裝硬件、規(guī)劃電源與選擇外殼
硬件組裝要點(diǎn)
線路和接口:保持 UWB 模塊和控制器安裝在剛性載體上,確保無(wú)線電部分下方接地層清潔;使用屏蔽式 USB 或 UART 跳線,并在接觸運(yùn)動(dòng)的連接器上增加應(yīng)力消除裝置。避免金屬靠近天線邊緣,以防改變天線特性,影響信號(hào)質(zhì)量和定位精度。
電源預(yù)算和電池選擇:根據(jù)無(wú)線電常用狀態(tài)規(guī)劃功率。標(biāo)簽在塔臺(tái)模式下收發(fā)消耗更多空中時(shí)間,到達(dá)時(shí)間模式下僅發(fā)送短暫閃爍信號(hào),能耗較低。接收比發(fā)送消耗更多功率,要縮短接收窗口和空中時(shí)間,使用滿(mǎn)足通信距離要求的高數(shù)據(jù)速率,縮短前導(dǎo)碼和有效載荷長(zhǎng)度。通過(guò)縮短消息傳輸時(shí)間、合理設(shè)置更新頻率、縮短接收窗口和預(yù)留瞬態(tài)干擾余量等方式降低能耗。同時(shí),記錄固件中的模式轉(zhuǎn)換,根據(jù)不同模式下的平均電流和占空比計(jì)算預(yù)期電池壽命,更改相關(guān)參數(shù)后重新運(yùn)行測(cè)量表格。
外殼選擇與安裝
外殼要求:外殼不應(yīng)成為射頻濾波器,保持天線暢通無(wú)阻,確保外殼在關(guān)鍵方向上保持一致。最好使用非導(dǎo)電、對(duì)射頻友好的外殼直接安裝在天線表面,盡量保持視線暢通,錨點(diǎn)通常安裝在房間較高處靠近天花板,根據(jù)頻道情況使用獨(dú)立的天線并保持饋電匹配。
錨固安裝:將錨固件牢固固定在剛性結(jié)構(gòu)上,避免振動(dòng),保持對(duì)覆蓋區(qū)域的清晰視線,避免將天線放置在靠近大型金屬表面的地方,除非已測(cè)量并補(bǔ)償其影響。給每個(gè)已安裝的節(jié)點(diǎn)貼上標(biāo)簽,便于校準(zhǔn)時(shí)追蹤電源和配置情況。部署前查閱當(dāng)?shù)?UWB 法規(guī)限制,確保射頻設(shè)置和外殼符合規(guī)則。在電源穩(wěn)定、線路無(wú)應(yīng)力和安裝到位后,進(jìn)行錨固和標(biāo)簽的刷寫(xiě)固件及配置標(biāo)準(zhǔn)化工作。
五、規(guī)劃錨點(diǎn)放置與校準(zhǔn)調(diào)試網(wǎng)絡(luò)
錨點(diǎn)放置規(guī)劃
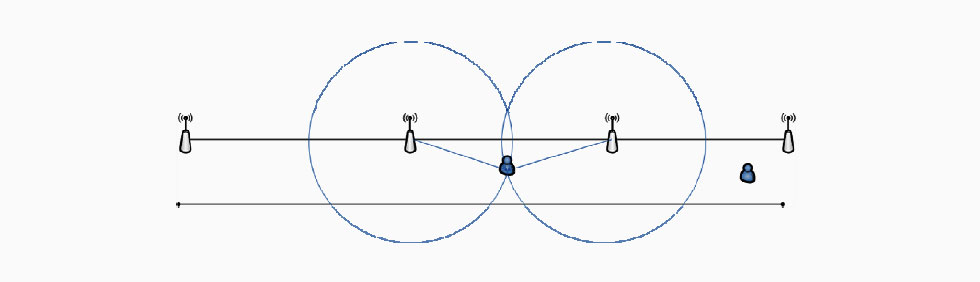
幾何規(guī)則:在覆蓋區(qū)域內(nèi)分散放置錨點(diǎn),使標(biāo)簽?zāi)芙邮盏讲煌轿唤牵苊忮^點(diǎn)共線或緊密排列,以防測(cè)距數(shù)據(jù)來(lái)自相似方向時(shí)幾何精度衰減加劇,將較小測(cè)距誤差放大為較大位置誤差。對(duì)于三維定位,保持錨點(diǎn)不共面,利用周界采用廣角布局,將至少一個(gè)錨點(diǎn)抬離公共平面。
高度、位置和視線:將錨點(diǎn)安裝在墻壁或天花板高處,減少遮擋,提高視距傳輸概率,遠(yuǎn)離金屬,確保天線附近有足夠空間,若要獲得穩(wěn)定 3D 性能,可使用不同高度。遵循供應(yīng)商提供的天線方向指南,確保附近物體朝向可預(yù)測(cè)。
小型和復(fù)雜房間布局:小房間使用四個(gè)非共面錨點(diǎn)進(jìn)行周長(zhǎng)或拐角處布局,避免直線;中等空間先設(shè)置周邊錨點(diǎn),再增加盲區(qū)錨點(diǎn);復(fù)雜幾何空間在遮擋區(qū)域使用基線加額外參數(shù),放置錨點(diǎn)開(kāi)辟新通道。
現(xiàn)場(chǎng)勘測(cè):走遍現(xiàn)場(chǎng)畫(huà)出覆蓋區(qū)域草圖,標(biāo)記大型反射器和阻擋物,站在候選錨點(diǎn)確認(rèn)通往跟蹤區(qū)域的線路暢通,在候選地點(diǎn)和標(biāo)簽間進(jìn)行快速測(cè)試范圍或 RSSI / SNR 檢查,選擇牢固安裝點(diǎn)并確認(rèn)電源和回程鏈路接入,記錄電纜走向并標(biāo)記每個(gè)計(jì)劃的錨固位置,選擇至少一個(gè)高度不同的錨點(diǎn)以減少共面性,記錄每個(gè)計(jì)劃錨點(diǎn)的臨時(shí)坐標(biāo)。
校準(zhǔn)和調(diào)試網(wǎng)絡(luò)
天線延遲和硬件偏移校準(zhǔn):通過(guò)設(shè)置初始天線延遲,收集固定錨點(diǎn)下標(biāo)簽在不同測(cè)量距離處的真實(shí)數(shù)據(jù)對(duì),擬合線性模型,將每個(gè)設(shè)備的發(fā)射和接收天線延遲或斜率和偏移量存儲(chǔ)在非易失性配置中。
基準(zhǔn)測(cè)試運(yùn)行:鋪設(shè)直線膠帶或畫(huà)小網(wǎng)格,將標(biāo)簽停在標(biāo)記處記錄停留時(shí)間,沿緩慢動(dòng)態(tài)路徑行走驗(yàn)證連續(xù)性和漂移行為,保存原始到達(dá)高度、計(jì)算出的距離和位置以及精確的配置文件。
檢查清單:驗(yàn)證固件版本和提交哈希值,確認(rèn)錨固點(diǎn)坐標(biāo)和高度,確保無(wú)線電配置匹配,已應(yīng)用校準(zhǔn),觀察TWR模式運(yùn)行狀態(tài),確保日志記錄就緒。
FAQ:DW3000 UWB 室內(nèi)定位常見(jiàn)問(wèn)題
Q1:DW3000 能否真正實(shí)現(xiàn)厘米級(jí)室內(nèi)定位?
A:可以。在視距條件良好、錨點(diǎn)布局合理并完成天線延遲校準(zhǔn)的情況下,基于 DW3000 的 TWR 測(cè)距方案可穩(wěn)定達(dá)到厘米級(jí)精度。實(shí)際精度主要受錨點(diǎn)幾何分布和環(huán)境反射影響。
Q2:錨點(diǎn)數(shù)量和擺放對(duì)精度影響大嗎?
A:影響非常大。錨點(diǎn)應(yīng)盡量分散、避免共線或共面,優(yōu)先安裝在高處并保持良好視距。合理的幾何布局往往比單純?cè)黾渝^點(diǎn)數(shù)量更重要。
Q3:天線延遲一定要校準(zhǔn)嗎?
A:必須。未校準(zhǔn)的天線延遲會(huì)直接引入系統(tǒng)性測(cè)距誤差,是影響定位精度的關(guān)鍵因素。使用已預(yù)置天線參數(shù)的模塊方案可顯著降低調(diào)試門(mén)檻。
Q4:開(kāi)發(fā)板方案和 UWB650Pro 模塊該怎么選?
A:需要底層算法開(kāi)發(fā)或協(xié)議定制,建議使用 DW3000 開(kāi)發(fā)板;注重快速部署和工程落地,UWB650Pro 模塊更合適,可通過(guò) UART 快速完成系統(tǒng)搭建。
Q5:復(fù)雜室內(nèi)環(huán)境下定位不穩(wěn)定怎么辦?
A:可通過(guò)增加錨點(diǎn)高度差、優(yōu)化錨點(diǎn)幾何結(jié)構(gòu)、結(jié)合 RSSI 輔助判斷非視距(NLOS)情況,并重新進(jìn)行現(xiàn)場(chǎng)校準(zhǔn)來(lái)提升整體穩(wěn)定性。
-
定位系統(tǒng)
+關(guān)注
關(guān)注
10文章
659瀏覽量
37647 -
UWB技術(shù)
+關(guān)注
關(guān)注
3文章
140瀏覽量
12149 -
室內(nèi)定位
+關(guān)注
關(guān)注
30文章
320瀏覽量
37755
發(fā)布評(píng)論請(qǐng)先 登錄
uwb室內(nèi)定位系統(tǒng)
UWB超寬帶室內(nèi)定位技術(shù)
常見(jiàn)的室內(nèi)定位方案
UWB室內(nèi)定位的優(yōu)勢(shì)
為什么UWB定位技術(shù)可用于室內(nèi)定位?
為何UWB室內(nèi)定位技術(shù)是最具潛力的高精度定位技術(shù)?
基于UWB技術(shù)的室內(nèi)定位方法簡(jiǎn)述
UWB定位的機(jī)遇與挑戰(zhàn) 室內(nèi)定位發(fā)展有哪些瓶頸?
影響UWB高精度室內(nèi)定位的7大因素
高精度室內(nèi)定位 室內(nèi)精確定位最高精度能達(dá)到多少?
UWB高精度室內(nèi)定位的特點(diǎn)
UWB室內(nèi)定位高精度定位應(yīng)用的寵兒
UWB室內(nèi)定位系統(tǒng)的發(fā)展前景
UWB室內(nèi)定位系統(tǒng)維度分析
基于Qorvo DW3000芯片的室內(nèi)定位系統(tǒng)構(gòu)建方法




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論