") 深視智能點激光/點光譜使用編碼器觸發(fā)采集操作說明
深視智能點激光/點光譜使用編碼器觸發(fā)采集操作說明

深視智能點激光/點光譜使用編碼器觸發(fā)采集操作說明旨在協(xié)助用戶更加全面地了解我們的傳感器設備。
步驟①:
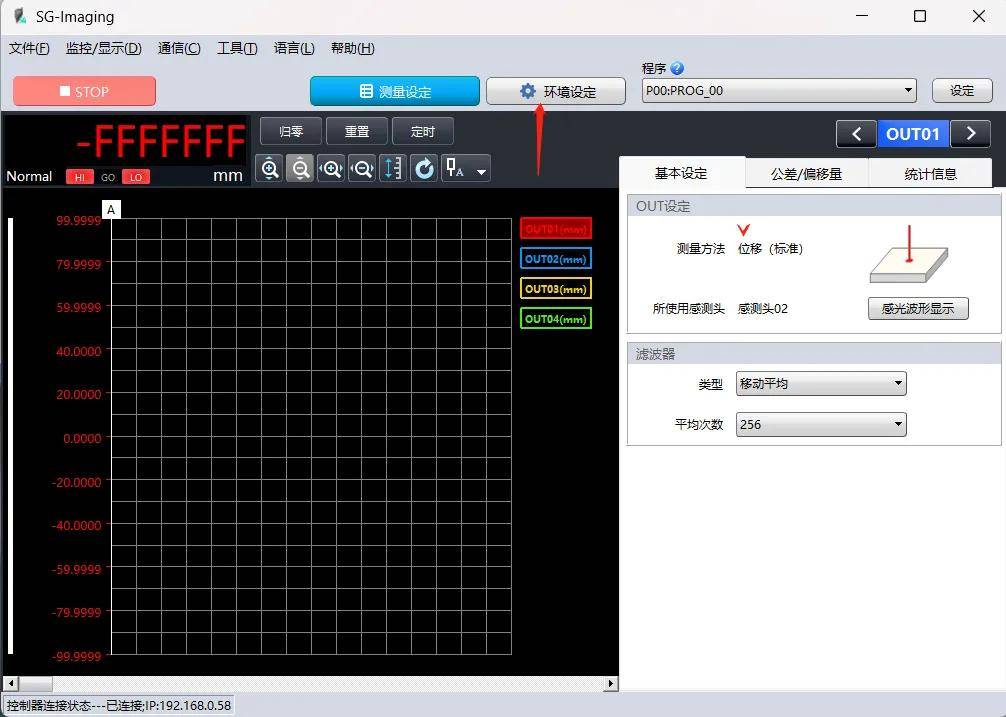
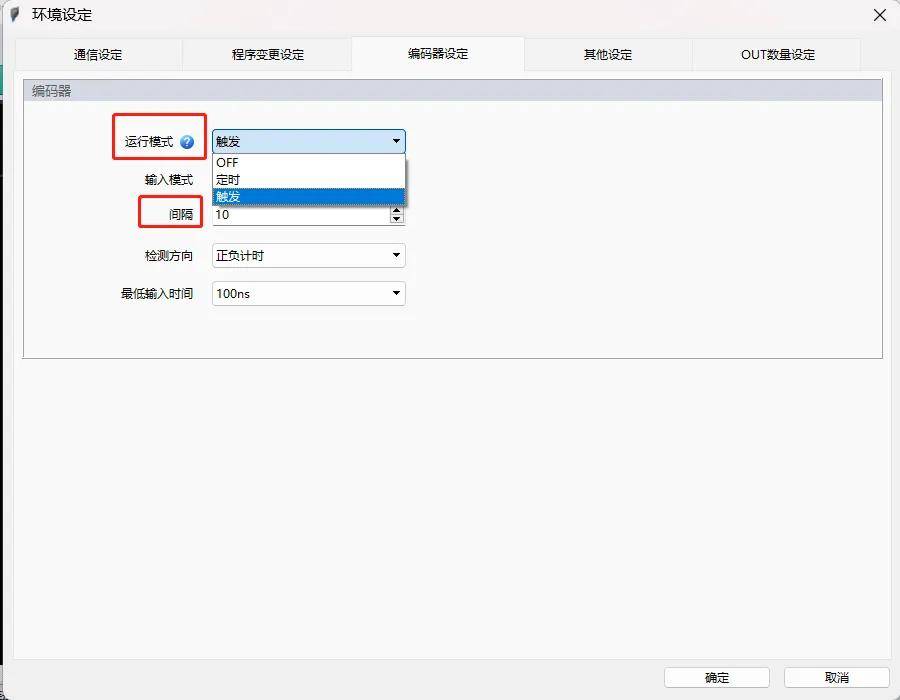
點擊主界面的環(huán)境設定,找到【編碼設定】,將運行模式選擇為觸發(fā),點擊確定。注意間隔值的設置,間隔表示的是編碼器觸發(fā)間隔,例如間隔是10,那就表示間隔10個脈沖信號采集一次。
步驟②:
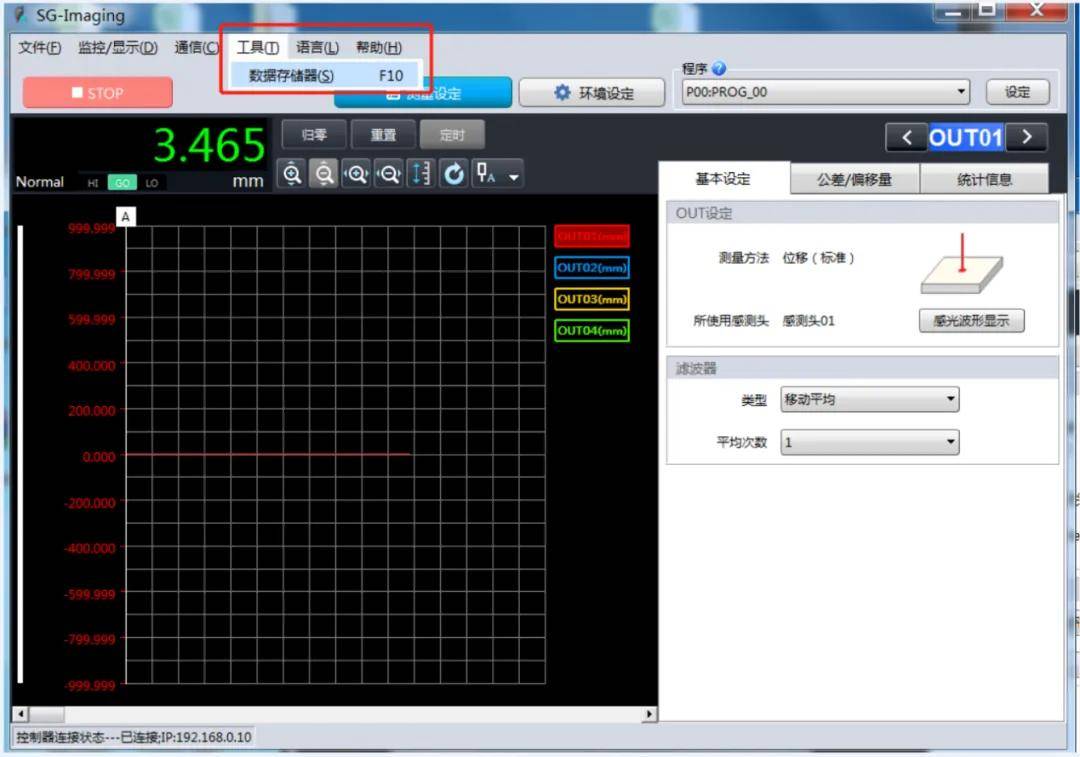
點擊主界面的任務欄中的工具,進入數(shù)據(jù)存儲器,點擊數(shù)據(jù)存儲設定, 可將存儲周期選擇*1,此時存儲再將需要輸出的 out 序號√上,點擊發(fā)送至控制器,再點擊存儲開始,此時等待編碼器信號采集數(shù)據(jù),要注意數(shù)據(jù)存儲量的設置,表示的是我需要采集的數(shù)據(jù)點數(shù), 采集運動距離=觸發(fā)間隔*數(shù)據(jù)存儲量,存儲點數(shù)=采集運動距離/脈沖當量*1 。
步驟③:
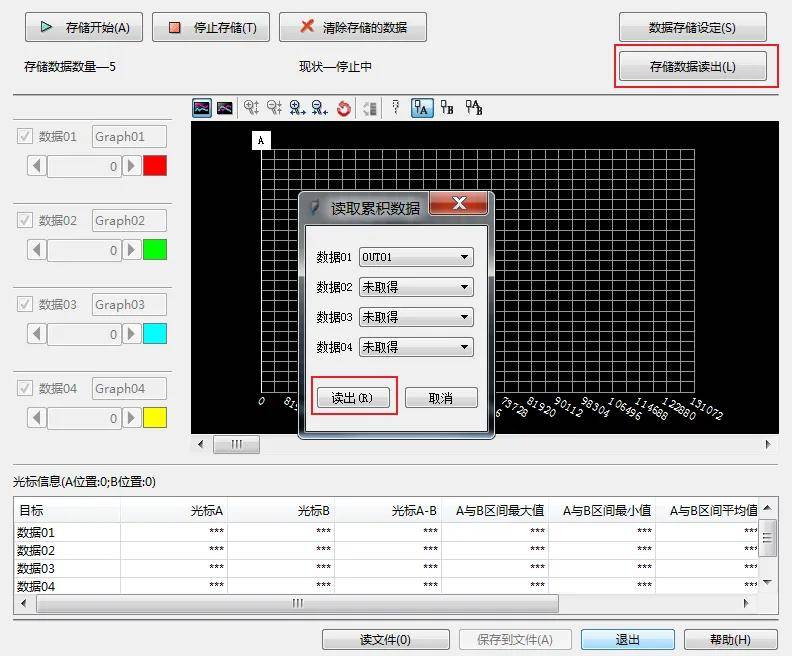
采集點數(shù)滿了之后自動停止采集,點擊存儲數(shù)據(jù)讀出就能得到采集的數(shù)據(jù),讀出后點擊下方保存到文件可以將高度點位數(shù)據(jù)以CSV格式保存。
本文為節(jié)選內(nèi)容,具體內(nèi)容請登錄深視智能官網(wǎng)查看。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
位移傳感器
+關注
關注
5文章
1258瀏覽量
36702 -
激光測距儀
+關注
關注
2文章
102瀏覽量
15834 -
激光測距
+關注
關注
9文章
193瀏覽量
28861 -
光譜儀器
+關注
關注
1文章
19瀏覽量
8662 -
光譜測量
+關注
關注
1文章
27瀏覽量
9765
發(fā)布評論請先 登錄
相關推薦
熱點推薦
深視課堂丨點激光位移傳感器SD33系列兩點示教操作指南(第四課)
的工業(yè)檢測需求。今天將為大家詳細介紹深視智能SD33系列激光位移傳感器兩點示教功能的


舵機伺服編碼器
—— 沒有編碼器的反饋,舵機就無法判斷自身是否到達目標位置,控制精度會大幅下降。 核心作用:實現(xiàn) “閉環(huán)控制” 舵機伺服編碼器的本質(zhì)是為舵機提供 “位置反饋”,其核心作用體現(xiàn)在以下 3 點: 位置檢測 :實時讀取舵機輸出軸
磁編碼器為何能取代光電編碼器?
在復雜工業(yè)場景下,磁編碼器憑借其不怕油污粉塵、抗沖擊振動、安裝便捷及高速響應等優(yōu)勢,正有效解決光電編碼器怕臟、怕震、難安裝、怕高速的痛點,逐漸成為提升機器人性能的新選擇。
深視課堂丨點激光位移傳感器SD33/SD22系列歸零設置教程(第二課)
大家好!歡迎來到本期產(chǎn)品小課堂。在精密測量中,為激光位移傳感器設置一個準確的“零點”基準是確保數(shù)據(jù)精準的第一步。今天,我們就來詳細講解一下如何為深視

深視課堂丨點激光位移傳感器SD33/SD22系列接線與安裝教程(第一課)
大家好!歡迎來到本期深視課堂。今天,我們將通過實際操作演示,帶你一步步了解深視智能
應用案例 | 深視智能線激光3D輪廓測量儀實現(xiàn)3C點膠質(zhì)量在線檢測
”通過引入深視智能SRI8020一體式三維激光輪廓測量儀,在點膠后工位進行一次高速掃描,能夠同步輸出膠寬、膠高與完整輪廓數(shù)據(jù),并實時比對工藝
增量型編碼器與絕對值型編碼器怎么選擇?
在選擇增量型編碼器與絕對值型編碼器時,需要考慮多個因素,包括應用需求、成本、精度、可靠性以及環(huán)境適應性等。以下是對兩種編碼器的詳細比較及選擇建議: 一、增量型編碼器 1. 優(yōu)點: ?
應用案例 | 深視智能SCI系列光譜共焦位移傳感器以亞微米精度精準把控手機鏡頭鏡片厚度
一手機鏡頭厚度測量痛點問題:手機鏡頭通常由多層鏡片疊加而成,同時每層鏡片表面還鍍著各種顏色的膜。挑戰(zhàn):傳統(tǒng)測量工具難以精準定位每層鏡片厚度,且易受顏色干擾,導致數(shù)據(jù)失真。二深視智能的“

技術指南丨深視智能點光譜共焦位移傳感器測量透明物體厚度操作指南
深視智能光譜共焦位移傳感器SCI系列透明物體厚度測量操作指南旨在協(xié)助用戶更加全面地了解我們的傳感

深視智能SCI系列光譜共焦位移傳感器以亞微米精度測量晶圓平整度
項目背景晶圓作為半導體芯片的核心載體,其表面平整度直接影響芯片性能、封裝良率及產(chǎn)品可靠性。傳統(tǒng)接觸式測量容易導致晶圓劃傷或污染,而常規(guī)光學傳感器受鏡面反射干擾難以實現(xiàn)高精度檢測。深視智能
編碼器常見的故障詳細說明
運行和加工精度。本文將詳細說明編碼器常見的故障及其排除方法,以幫助用戶更好地維護和使用編碼器。 一、信號輸出故障 1. 無信號輸出:編碼器無法產(chǎn)生信號,上位機或控制系統(tǒng)接收不到任何數(shù)據(jù)
瑞薩RZ T2M與RZ T2L微控制器的編碼器接口使用有何差異
RZ T2M和RZ T2L兩款芯片在編碼器接口的硬件實現(xiàn)上有所差異。不少客戶關注到這個差異之后,比較關心二者在編碼器接口使用上有什么差異和注意事項。本文就客戶的關注點展開詳細的說明,在

深視智能SCI系列點光譜共焦位移傳感器破解晶圓搭邊檢測難題
光弱、縫隙干擾等問題難以精準識別晶圓搭邊狀態(tài)。針對這一難題,深視智能SCI系列光譜共焦位移傳感器憑借33kHz超高速采樣、自研超強感光算法及



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論