 伺服驅動器重要參數的設置方法和技巧
伺服驅動器重要參數的設置方法和技巧

伺服驅動器的重要參數設置是確保伺服系統高效、精準工作的關鍵步驟,涉及到位置控制、速度控制、力矩控制等多個方面。以下是一些主要參數的設置方法和技巧:

1.位置比例增益(Position Proportional Gain,Kp)
●作用:
決定系統對位置誤差的反應速度和精度。
●設置技巧:
從小到大逐步增加,直到系統在無負載或輕負載下運行穩定,同時避免出現振蕩。
●檢測方法:
觀察伺服電機的響應,若出現振蕩,則減小增益;若響應緩慢,則適當增大。
2.速度比例增益(Velocity Proportional Gain,Kv)
●作用:
控制速度環的響應速度。
●設置技巧:在確保位置增益設置合理的基礎上,調整速度增益,使之既能快速響應速度指令變化,又不引起過大的速度波動。
●注意:速度增益過高可能導致系統不穩定,過低則響應慢。
3.速度積分時間常數(Velocity Integral Time,Ki)
●作用:消除速度誤差,提高系統穩定性。
●設置技巧:在避免速度漂移的同時,盡量減少積分作用帶來的超調和振蕩,逐步增加直至系統響應平穩。
●平衡點:找到增益與穩定性的最佳平衡點。
4.位置前饋增益(Position Feedforward Gain,Kf)
●作用:提高系統對快速變化指令的響應速度,減少跟隨誤差。
●設置技巧:根據負載慣量、速度要求和系統動力學特性調整,過高可能導致超調,過低則響應遲緩。
●測試:通過實際測試,觀察和調整以達到最佳性能。
5.電流環參數(Current Loop Gains,Kt,Ki)
●作用:控制力矩輸出,直接影響電機的響應速度和精度。
●設置:通常由制造商預設,但在特殊應用中可能需要調整,以適應高動態響應要求或重負載。
6.其他技巧
●逐步調整:逐一調整參數,觀察系統響應,避免同時更改多個參數導致問題難以定位。
●負載模擬:在實際運行前,使用負載模擬或在無負載下進行初步調試,逐步增加負載,觀察并調整參數。
●使用軟件工具:利用伺服驅動器自帶的調試軟件或第三方工具,進行參數優化和故障診斷。
●記錄與比較:記錄每次調整后的參數和系統響應,便于回溯和比較,找到最優設置。
●安全第一:在調整過程中確保安全措施到位,避免意外傷害或設備損壞。
每種伺服驅動器的具體設置方法和參數名稱可能有所不同,務必參考設備的用戶手冊或聯系制造商獲取詳細指導。
-
工業控制
+關注
關注
38文章
1660瀏覽量
91535
發布評論請先 登錄
伺服驅動器最常見的故障及解決方法

如何設置D2590驅動器的電流環參數?
MADDT1205A21驅動器的過載保護閾值如何設置?
MADDT1205A21驅動器有哪些參數設置?
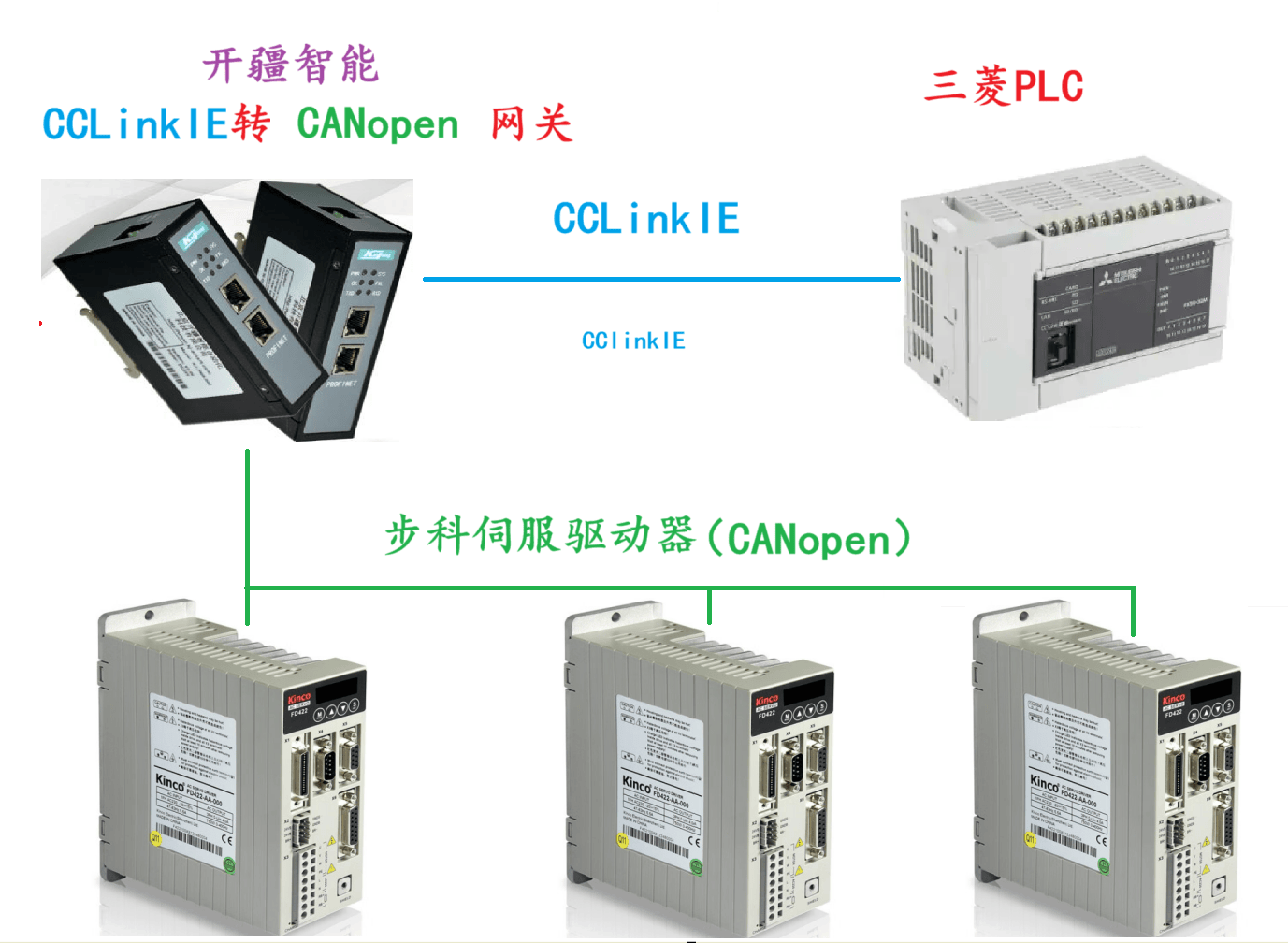
步科伺服驅動器通過CCLinkIE轉CANopen網關的標準化控制網絡接入

人形機器人伺服電機驅動器新動力:高性能電容器的協同作用

工業機器人伺服驅動器配哪樣的UPS不間斷電源比較好

永磁電機調速驅動器與伺服驅動器、變頻器有哪些異同?

開疆智能CCLinkIE轉CANopen網關連接步科伺服驅動器配置案例
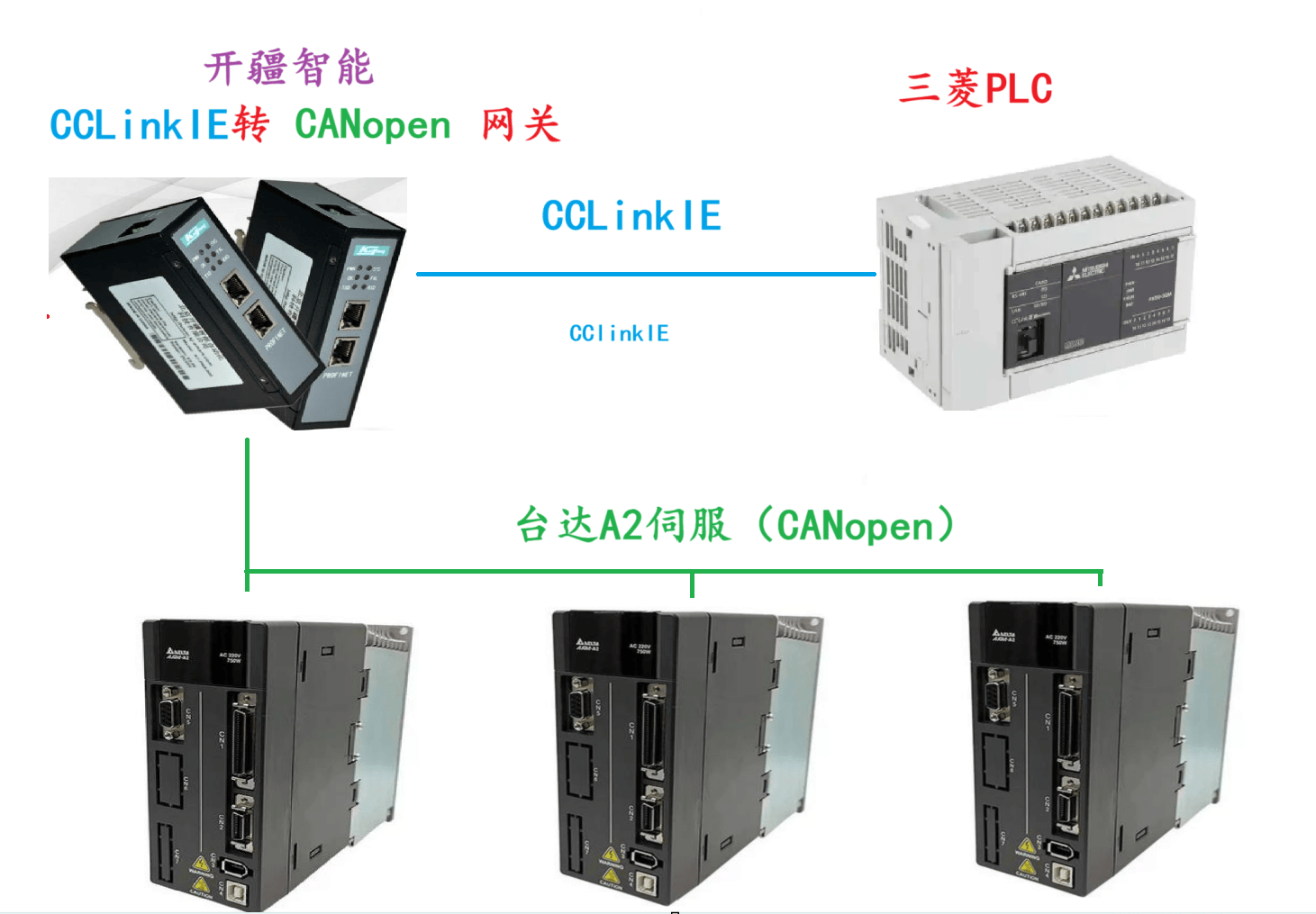
開疆智能CCLinkIE轉Canopen網關連接臺達伺服驅動器配置案例
伺服電機過載燒毀這3個參數調試細節

富士伺服驅動器的常用故障代碼及其檢查與維護

EtherCAT科普系列(3): EtherCAT技術在伺服驅動器領域的應用

變頻器重新設置參數應注意什么?




 工商網監
工商網監
評論