 AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃
AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃

AGV是實現柔性制造、裝配及自動化物流的關鍵設備之一,近幾年來,隨著各國智能制造政策的不斷實施,促進了AGV產業的快速發展。
目前,AGV系統廣泛應用于各個行業之中,比如物流行業、新能源行業、汽車行業、制藥行業等等。隨著幾十年的發展,AGV系統在結構、調度、導航方式等方面的發展更加趨近各行各業的需求,在穩定性、靈活性、安全性、智能化方面的優勢越加凸顯。
路徑規劃技術是AGV根據當前位置和目標點位置,在多個選擇路徑中選擇最優路徑的過程。目前,常用的路徑規劃算法有A*算法、Dijkstra算法和遺傳算法等。
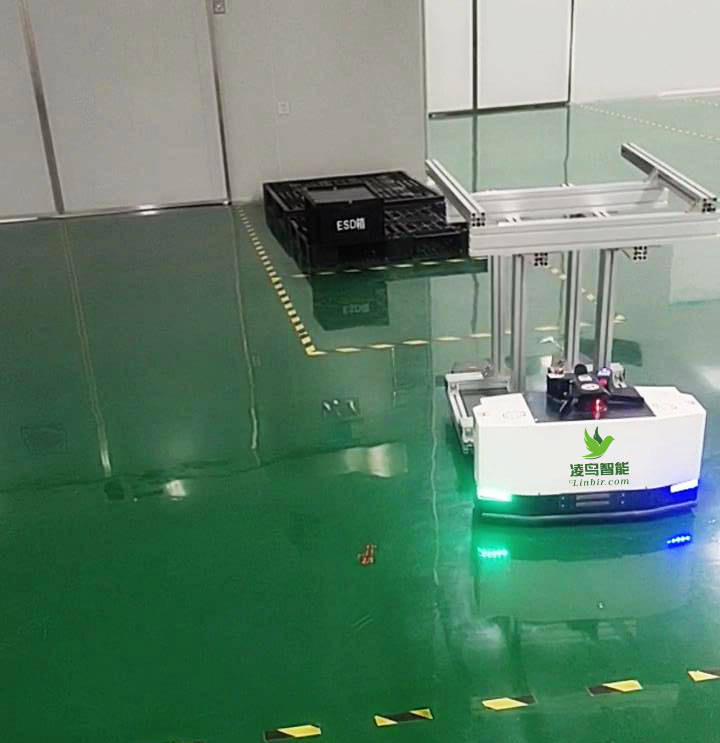
 AGV地牛小車
AGV地牛小車
A*算法是常用的啟發式搜索算法,通過評估每個候選節點的代價函數,預測目標節點的最優路徑。這種算法技術考慮了路徑的距離和啟發式估計,具有較高的搜索效率,準確性也較高。
Dijkstra算法是一種基于圖的最短路徑搜索算法,通過不斷更新起點到各個節點的最短路徑長度,逐漸擴大搜索范圍,找到目標點的最短路徑。Dijkstra算法適用于無向圖和有向圖,但在復雜的場景中時間復雜度較高。
遺傳算法模擬生物的進化過程,通過選擇、交叉和變異等操作,優化路徑規劃的解決方案。遺傳算法適應性強、全局搜索能力強,能夠適應復雜的物流場景和多目標路徑規劃問題,但計算復雜度較高,適合于規模較小的問題。
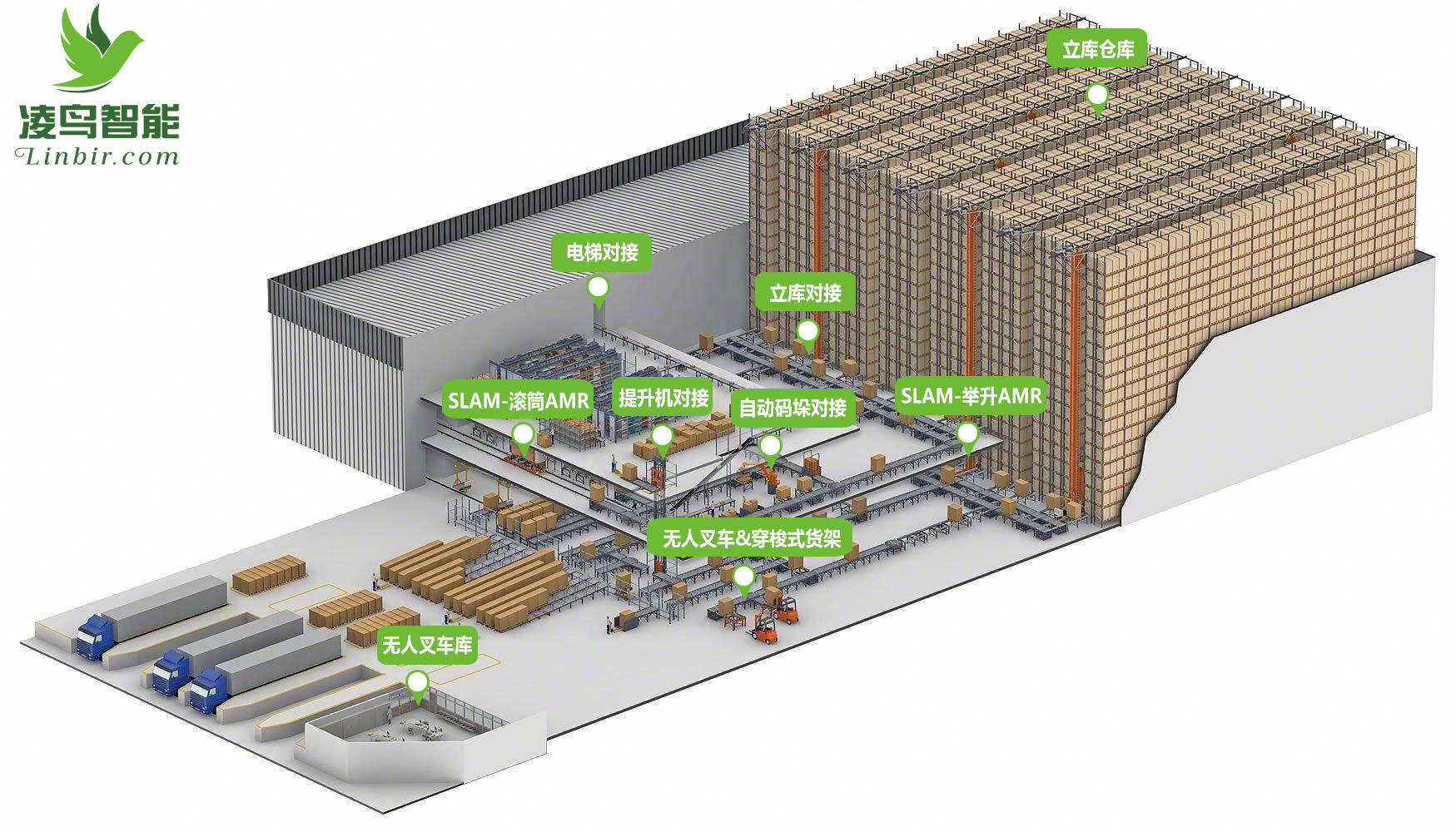
 AGV軟件系統
AGV軟件系統
為了提高AGV導航和路徑規劃技術的性能,以下是一些優化方向:
多傳感器融合
通過將多個傳感器的數據進行融合,提高定位和跟蹤的準確性,降低誤差。
高精度地圖構建
構建高精度的地圖,包括環境地圖和路網地圖,能夠為路徑規劃提供準確的參考,提高路徑規劃的效果。
實時路徑更新
在動態環境中,實時更新路徑規劃結果,考慮障礙物的變化,能夠使AGV更加靈活和適應不同場景。
深度學習技術
利用深度學習算法,通過對傳感器數據進行分析和處理,實現更智能和更精準的導航和路徑規劃,提高系統自適應性。
 AGV小車
AGV小車
傳統的叉車和拖車作業,需求有人駕馭。而叉車或拖車司機在工作期間需要吃飯喝水、休息,還可能發生怠工等影響作業功率的事件,叉車和拖車工作到一定時間還需求開到充電間進行充電,導致實際工作負荷不足70%;
而AGV搬運機器人作為自動化物料搬運設備,可在線充電,24h滿負荷作業,具有人工作業無法比擬的優勢。AGV搬運機器人可以做到高效率運行,合理安排,站點排隊。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
31092瀏覽量
222350 -
AGV
+關注
關注
28文章
1554瀏覽量
43682 -
AGV小車
+關注
關注
4文章
195瀏覽量
12147
發布評論請先 登錄
EtherNet/IP轉EtherCAT網關實現智能倉儲AGV產線通訊應用案例

AGV工作節拍計算
倉儲 AGV 調度亂?智能系統優化路徑,利用率升 25%

絕緣子漏電起痕試驗儀泄漏電流信號的小波變換分析及電弧能量計算

三坐標測量機路徑規劃與補償技術:核心算法解析
AGV小車中的動態路徑規劃算法揭秘

無人叉車AGV的智能物流樞紐邏輯:對接方式分類、技術原理及場景適配

AGV通信第5期 多AGV協同調度解決方案,賦能高密度物流作業

AGV通信第2期 AGV集群智能路徑規劃解決方案

AGV通信第1期 KAXA無線通信技術賦能AGV智慧物流系統升級

KAXA凱莎科技AGV通信方案如何賦能智能倉儲高效運作?
三維天地智能路徑規劃引擎:以算法驅動,重新定義智能路徑優化技術
常見傳動機構負載慣量計算方法及實例

如何選擇合適的水位流量計算公式?



 工商網監
工商網監
評論