") 借助多個預(yù)校正相機的準確 360° 球型成像
借助多個預(yù)校正相機的準確 360° 球型成像

機器視覺發(fā)展至今,球型視頻數(shù)據(jù)的質(zhì)量和靈活性使該媒介成為需要同步視頻流的應(yīng)用的理想之選。典型的是成為GIS應(yīng)用,例如移動地圖和街景,彩色化LIDAR生成的3D點云。
Teledyne FLIR Ladybug6 紅色
Ladybug6 紅色 Ladybug6 黑色
Ladybug6 黑色
Teledyne FLIR Ladybug球型成像系統(tǒng)具有圖像采集、處理、拼接和校正功能,可將多個攝像頭圖像實時合并到全分辨率的數(shù)碼球型和全景流式視頻之中。這種實時媒體流的能力在市場上是獨特的。
多個攝像頭同步化mainfeatures
在一些系統(tǒng)使用鏡子或魚眼鏡頭產(chǎn)生全景效果的情況下,Ladybug 系統(tǒng)使用六個具有高質(zhì)量圖像傳感器的攝像頭,以從代表整個球型 90% 的六個優(yōu)越位置收集并真正提供圖像。五個傳感器位于水平環(huán)上,而一個的位置則是垂直指向上方。這六個攝像頭都經(jīng)過預(yù)先校正;這就是關(guān)鍵技術(shù),使得在系統(tǒng)之內(nèi)的很多其它創(chuàng)新成為可能。由于鏡頭設(shè)置,例如焦點與虹膜,均為固定以確保相機保持校正狀態(tài),使其不需要現(xiàn)場校正。
Ladybug相機受控于作為SDK的一部分的 Ladybug API。這樣能夠完全控制相機、圖形呈現(xiàn)以及坐標系統(tǒng)概述。圖像呈現(xiàn)支持包括實時校正、拼接和混合。系統(tǒng)坐標允許用戶單獨管理這六個傳感器中的任一個。最后,SDK 允許用戶整合系統(tǒng)與其定制應(yīng)用。
幾何校準與精準性main features
Ladybug系統(tǒng)并非僅依靠機械校準,它還可通過軟件對各個攝像頭進行單獨校準,然后再與另外五個攝像頭進行一一比對校準。該系統(tǒng)能夠識別與每個攝像頭的每個像素有關(guān)的矢量,精確度高達百分之一度。這反過來能使應(yīng)用知道,相對于剩余的世界,相機在哪里。為了能夠提供這種相關(guān)數(shù)據(jù),Teledyne FLIR 不僅解決了校正鏡頭的問題,而且還解決了校正在所有六個鏡頭之間旋轉(zhuǎn)和轉(zhuǎn)化至高精度的更大挑戰(zhàn)——一個因攝像頭視場之間的小重疊而更困難的問題。
Ladybug 校準的幾何精確度意味著圖像數(shù)據(jù)在整個球型上的空間一致性,而不僅僅是在整個拼接縫內(nèi)。這允許Teledyne FLIR軟件呈現(xiàn)任何視頻球體的局部視圖,即使那樣呈現(xiàn)跨越多個相機圖像,也沒有矚目的鏡頭失真。
使用軟件校正而不是機械調(diào)準的決定,意味著 Ladybug 相機能夠按照有效且合理的機械耐受性要求進行組裝。Teledyne FLIR已經(jīng)自動化了工廠校正流程,從而產(chǎn)生極其一致且可靠的結(jié)果。機械設(shè)計和自動化校準已經(jīng)使 Ladybug 相機生產(chǎn)非常穩(wěn)定,而且可以適應(yīng)不斷變化的需求。另外,工廠校正和牢固的外殼設(shè)計消除任何現(xiàn)場校正的需求。Ladybugs 經(jīng)原廠校正一次,然后再封裝入經(jīng)加固的獨特剛性外殼,其牢固程度足以抵御溫度、振動和電擊的變化。因此,校正保持完整,而且不再有需要作出現(xiàn)場校正。
校準的優(yōu)勢main features
使得應(yīng)用程序知道相機與世界相對位置的能力,使Ladybug超越相機拍攝全景圖像,并進入計算機視覺的王國,從而打開一系列可能的應(yīng)用程序。
最大動態(tài)范圍的后處理過程main features
憑借 Ladybug5+,圖像處理從相機轉(zhuǎn)移到用戶控制結(jié)果的主機上。Ladybug5+ 捕獲、壓縮以及傳送全色深度(12 位)圖像到主機。LadybugCapPro的后處理工具欄用于運用白平衡、灰度系數(shù)、拖尾校正、衰減校正和其它圖像處理功能。用戶可以在查看圖像時選擇并嘗試各種設(shè)置,并且可以觀看實時效果。
后處理的優(yōu)勢main features
捕獲和后處理工作流程模型可使用戶能夠返回到原始內(nèi)容,并根據(jù)需要重新應(yīng)用各個后期處理步驟從而把動態(tài)范圍最大化,并保持其靈活性。
-
傳感器
+關(guān)注
關(guān)注
2577文章
55359瀏覽量
793319 -
機器視覺
+關(guān)注
關(guān)注
165文章
4819瀏覽量
126387 -
GIS
+關(guān)注
關(guān)注
2文章
345瀏覽量
44083
發(fā)布評論請先 登錄

360度全息幻影成像
基于RK3588的360°全景相機
幾何校正自動化中的相機自動定位方法
數(shù)碼相機的成像原理圖
如何自建360度球幕影院
數(shù)碼相機成像原理
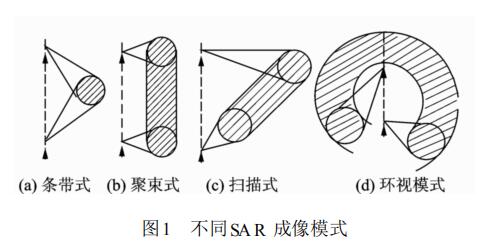
環(huán)視SAR成像處理中的幾何失真校正算法
Wunder360發(fā)布了360度新相機,具有“先拍后選”的拍攝風(fēng)格
魚眼相機的成像原理與成像模型解析
IFD-x 微型紅外成像儀與手機APP連接時光學(xué)相機圖像與熱成像疊加說明
【虹科】如何借助PTP來做高精度相機同步?

濱松科研級相機天文領(lǐng)域應(yīng)用案例:太陽成像

Ladybug 全景相機, 360°球形成像,帶來全方位的視覺體驗

Teledyne全景高精度工業(yè)相機——Ladybug6




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論