 【虹科】如何借助PTP來做高精度相機同步?
【虹科】如何借助PTP來做高精度相機同步?

 ?在某些應用場合中,如果需要處理來自多臺相機的圖像時,則圖像記錄的精確時間或準確的先后順序對后續處理至關重要。若相機能夠提供時間戳,則可為不同的圖像數據建立時間基準。然而,相機的時間基準要能夠精確匹配,這一點至關重要。通過使用“精確時間協議”(PTP),HK IDS GigE Vision相機(固件版本2.2或以上)能夠輕松實現同步。
?在某些應用場合中,如果需要處理來自多臺相機的圖像時,則圖像記錄的精確時間或準確的先后順序對后續處理至關重要。若相機能夠提供時間戳,則可為不同的圖像數據建立時間基準。然而,相機的時間基準要能夠精確匹配,這一點至關重要。通過使用“精確時間協議”(PTP),HK IDS GigE Vision相機(固件版本2.2或以上)能夠輕松實現同步。借助精確時間協議(PTP)同步
HK IDSGigEVision相機
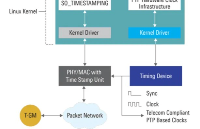
精確時間協議(PTP)是一種時間同步標準(IEEE1588),它使通過網絡連接的設備實現時間同步。支持此標準的相機可在特定的周期內與主時鐘交換同步信息。利用各自發送和接收時間中的時間戳信息,相機內部的計數器可實現精確地校準和同步。所有固件版本為2.2及以上的HK IDSGigEVision相機都可與PTP兼容!IEEE1588時間戳是以1970年1月1日0時0分為計時起點,支持1納秒(1 GHz)的時間分辨率。然而,由于延遲和信號運行時的不準確性,聯網設備的時間同步精度達微秒級。PTP應用案例
PTP作為一種基礎協議,通過為圖像數據提供時間基準,為各種應用奠定基礎。視應用要求及網絡基礎設施的復雜性的不同,PTP可以通過不同的方式來實現。1. 相對時間戳同步
在本案例中,所有相機都在同一個網絡。其中一臺相機為主服務器,其余相機為從服務器。所有從相機的時間戳與主相機同步。相機既不提供絕對時間戳(實時),同時在無其他操作的情況下,也無法實現同步觸發。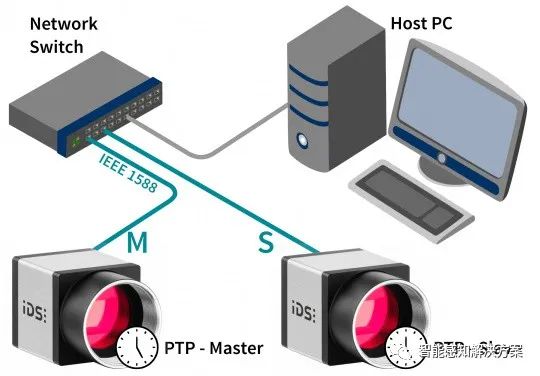 ?
?優勢:
-
在該應用場合中,相對時間戳確定所有相機圖像記錄的時間分配。此外,相對時間戳還能確定哪一張圖像為第一張,以及不同相機的圖像時差大小。
-
無需額外的操作和成本,即可為特定的網絡基礎架構生成相對時間戳。
2. 利用絕對時間同步時間戳
本案例中,聯網相機與外部主時鐘同步。該PTP主時鐘可以是支持“硬件時間戳”的網卡——若無硬件支持,同步精度將顯著降低。除必要的硬件外,還需要支持PTP的軟件。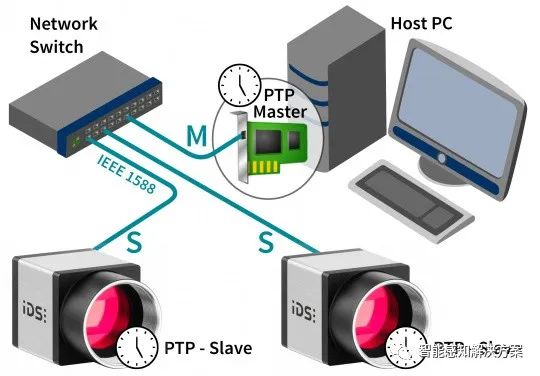
優勢:
-
具備全局(實時)時間戳的圖像內容可跨越當前的應用限制,與任何其他使用實時時間基準的信息相關聯。
-
對于其它使用全局時間基準的應用場合或評估,圖像內容可以重用。
使用PTP:“相對同步”
硬件設置
兩臺不同的固件版本為2.2(支持PTP)的HK IDS GigE Vision相機(GV-526xFA-C和GV-504xCP-M)連至同一網絡交換機。一臺額外的主機PC,僅用于控制和配置相機,不涉及相機的PTP同步。軟件設置
可通過“PtpControl”下的相機功能節點圖查找所有PTP配置功能。只有固件需為2.2或以上版本的相機才能使用這些功能。我們在主機PC上安裝配套軟件,來設置PTP同步。將一臺相機配置為PTP主時鐘
GV-526xFA-C相機應設置為PTP主時鐘。在軟件中打開相機,并將“PtpEnable”設為“True”,啟用PTP。另外,將“PtpSlaveOnly”設為“False”為相機賦予“主時鐘”角色。# Configure master cameraPtpEnable = TruePtpSlaveOnly=False將另一臺相機配置為PTP從時鐘
GV-504xCP-M相機應設為PTP從時鐘。同理,將“PtpEnable”設為“True”以啟用PTP。此時,這臺相機僅作為從時鐘使用。將“PtpSlaveOnly”仍設為“True”。# Configure slave cameraPtpEnable = TruePtpSlaveOnly = True
創建主從等級
在完成主從時鐘配置后,主-從等級將自動創建。對于主時鐘相機,可通過“PtpStatus”由“Listening”變成“Master”來確定。對于從時鐘相機,可通過“PtpStatus”先由“Listening”變為“Uncalibrated”,并在與主時鐘相機同步后變為“Slave”來確定。在通過相機的新PTP功能完成主從等級創建后,“相對同步”也隨之完成。啟用時間戳
如果您希望對圖像數據使用已同步相機生成的時間戳,則必須將時間戳作為元數據,啟用元數據(及塊數據)傳輸。首先,將“ChunkModeActive”設為“True”,以通過圖像緩沖區啟用塊數據傳輸。然后,通過“ChunkSelector”選擇“Timestamp”,并通過“ChunkEnable”開關啟用時間戳。
# activate chunk data creationChunkModeActive = True # enable "ChunkTimestamp"ChunkSelector = TimestampChunkEnable = True這時,相機所采集的每一張圖像將具備相應的時間戳,并借助圖像緩沖區(通過塊數據)傳輸至主機PC。這樣,塊數據及時間戳可通過任何視覺標準軟件進行讀取。圖像采集
如果應用中需要對帶時間戳的圖像數據進行處理,則圖像的記錄時間和相機的觸發至關重要。這種情況取決于來自多臺相機的圖像是否需要完全相同的采集時間(同步圖像采集)以及時間關聯偏差(時間戳抖動)有多大。根據應用要求,須選擇適合相機的觸發模式。在做出這一選擇時,要考慮的決定性的因素不僅包括不同軟件和硬件信號模式的精度,也包括部署和使用所需操作和成本。為檢查先前配置的“相對同步”,我們使用每秒脈沖數(PPS)信號來觸發相機,以實現同步自由運行。同步自由運行
顧名思義,在PTP功能啟用的情況下,每臺相機(主時鐘相機和從時鐘相機)的PPS信號會每秒生成一個。因此我們可借助PPS信號檢查相機的同步狀態。這一信號被設置為觸發源,因此每秒鐘將觸發一次圖像采集。除了由“相對同步”導致的幾微妙的偏差,相機生成的圖像時間戳應為一致。通過PPS信號實現所有相機同步自由運行的操作如下:# image acquisition configuration for both camerasLineSelector = Line2LineMode = OutputLineSource = PPSTriggerSelector = ExposureStartTriggerMode = OnTriggerSource = Line2 # Limit bandwidth on both camerasDeviceLinkThroughputLimit = 60000000 # Start acquisition on both camerasExecute AcquisitionStart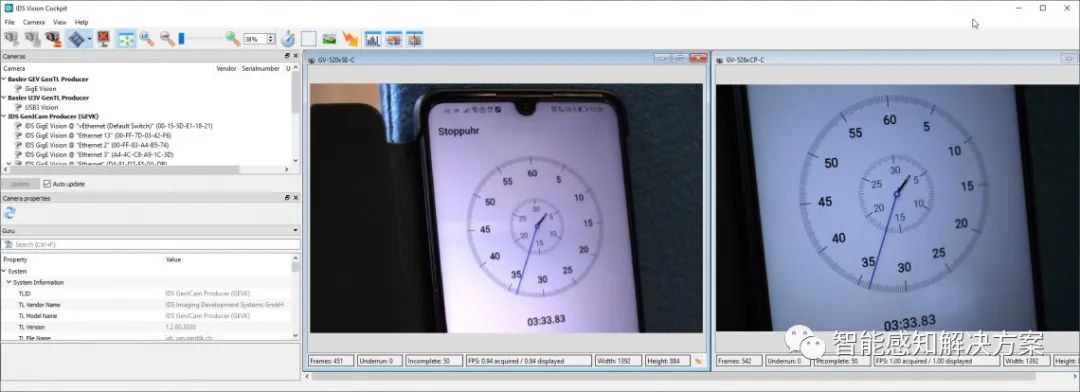 同步PPS觸發信號將觸發相機在同一時間點進行圖像采集
同步PPS觸發信號將觸發相機在同一時間點進行圖像采集讀取時間戳
為在應用場合中處理時間戳和圖像內容,您須讀取當前圖像緩沖區的塊數據。塊數據為制造商相關的有效負載緩沖區,其存儲布局通常未知,因此我們將通過節點圖來讀取各個元數據。為此,所有現有的元數據及其標準的節點名稱將從GenTL傳輸至節點圖,以便通過標準的API進行訪問。以下的源代碼片段為您演示如何從圖像緩沖區中提取時間戳。安裝包也為您提供了有關塊數據處理的完整源代碼示例。// Get buffer from device's datastreamconst auto buffer = m_dataStream->WaitForFinishedBuffer(5000); // check buffer for chunksif (buffer->HasChunks()){ // update nodemap with current chunk data m_nodemapRemoteDevice->UpdateChunkNodes(buffer); // Get the value of the timestamp chunk const auto chunktimestamp = m_nodemapRemoteDevice->FindNode("ChunkTimestamp")->Value();}
總結
當涉及圖像內容的時間分配時,PTP是多相機應用場合中一個重要的基礎功能,能夠輕松實現相機間的相對同步,無需額外的硬件和軟件支持。在許多應用場合中,相對相機同步也足以確保圖像在“相同”的時間或以正確的順序使用。相機還配備外部定時器,適用于全局同步。如果您對通過PTP同步時間存有疑問或需要了解更多信息,請聯系我們。end
關注我們,持續給您分享干貨!關于我們

虹科智能感知事業部專注于智能感知與機器視覺領域,已經和IDS,Blickfeld和Gidel等有著重要地位的國際公司展開深度的技術合作。我們的解決方案包括3D激光雷達,工業相機,視覺處理平臺,圖像采集卡及視覺系統集成等。虹科的工程師積極參與國內外專業協會和聯盟的活動,我們非常重視技術培訓和積累,公司定期與國內外專家團隊進行交流和培訓。
往期回顧
【虹科】蘊藏在廢物分類中的機器人技術革命
【虹科新聞】虹科受邀參加香港地鐵外來物檢測招標項目
【虹科】速度與激情:用于高速和高分辨圖像處理的緊湊型計算機FantoVision 20【虹科】機器視覺-LUT技術入門
【虹科】虹科教您部署混合人工智能以降低檢測成本【虹科】無需編碼,構建流程圖開發視覺應用,強勢來襲!
【虹科】激光雷達在安防中的應用——改變游戲規則
【虹科】嵌入式3D視覺功能原文標題:【虹科】如何借助PTP來做高精度相機同步?
文章出處:【微信公眾號:智能感知解決方案】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PTP
+關注
關注
0文章
96瀏覽量
9736
發布評論請先 登錄
相關推薦
熱點推薦
高精度時間同步的IEEE1588 PTP授時服務器
,IEEE1588精確時間協議(Precision Time Protocol,簡稱PTP)應運而生,憑借亞微秒級的同步精度、靈活的組網方式和優異的兼容性,成為當前高精度時間

基于PTP,如何做好多傳感器微秒級時間同步?
01引言自動駕駛車輛行駛過程中,多傳感器(相機、激光雷達等)采集的帶有精準同步時間戳的數據,是車輛實現高精度感知、定位、決策與規劃的核心前提。正因如此,在自動駕駛數據采集系統中,傳感器與主控單元之間通常會采用(g)

虹科答疑 | 使用虹科PCAN-Explorer 6進行.DBC解析總共分幾步?
各位虹科的新老客戶朋友們,大家好!「虹科技術答疑專欄」今天正式和大家見面了~做這個專欄的初衷很簡單:平時收到不少朋友咨詢實操問題,與其零散回復,不如集中分享——每期聚焦一個高頻痛點,用

PTP/GPTP主時鐘服務器的應用? PTP時間服務器
,精準記錄電力事件發生時間以保障電力調度的順暢,高精度的時間同步都顯得至關重要。? 超高精度同步:SYN2413型PTP時鐘服務器基于先進的

新品發布 | 車輛矢量測試難?虹科WVS系統來破局
虹科WVS車輛矢量測試系統高精度|抗干擾|輕量化在智能底盤開發中,您是否也曾困擾于:實車測試數據的重復性與一致性難以保證?多傳感器數據不同步,導致因果分析困難,拖慢研發進度?測試系統本
打破汽車動態測量困局, 虹科OMS光學傳感器重塑汽車測試精度標桿
科技應用對數據精度、可靠性與便捷性的嚴苛要求。虹科OMS 7光學傳感器將先進光學感知系統與高精度慣性測量單元深度融合,帶來從底層原理到應用體驗的徹底革新。
虹科分享 | 打破汽車動態測量困局, 虹科OMS光學傳感器重塑汽車測試精度標桿
技術瓶頸已難以滿足前沿科技應用對數據精度、可靠性與便捷性的嚴苛要求。虹科OMS7光學傳感器將先進光學感知系統與高精度慣性測量單元深度融合,帶來從底層原理到應用體驗
深入理解PTP:高精度時間同步的核心原理
PTP實現高精度的核心在于其精密的測量機制和對網絡延遲的細致處理。我們以常見的端到端 (End-to-End, E2E) 延遲請求-響應機制為例,來剖析PTP的“對表”藝術。
一文看懂 PTP(精確時間協議)及SONiC上的最新優化實踐
PTP 用于為時間同步敏感的系統和應用程序在局域網或廣域網上創造高精度時間同步的環境,往往需要通過硬件輔助才能實現。PTP 在 IEEE 1

虹科干貨 | AS三部曲之一:如何理解TSN同步概念中的時鐘角色?
導讀隨著時間同步需求的增長,IRIG-B、LORAN-C、NTP、PTP、GPS同步和SyncE等技術相繼被提出并應用。然而,這些方案要么難以滿足高精度要求,要么實現成本過高,限制了它
PTP 時鐘:精準時鐘同步的核心力量
的 SYN2407 系列 PTP 時鐘模塊,以其卓越的性能和廣泛的適用性,成為了實現高精度時鐘同步的關鍵組件。 一、SYN2407 系列 PTP 時鐘模塊概述 SYN2407 系列
PTP同步時鐘使用注意事項及場景應用
在數字化時代,精準時間同步對分布式系統至關重要。PTP(精確時間協議,IEEE1588標準)應運而生,它通過網絡傳輸時間戳,突破傳統同步技術局限,可實現亞微秒級高精度時鐘
PTP 時鐘:精準時鐘同步的核心力量?
的 SYN2407 系列 PTP 時鐘模塊,以其卓越的性能和廣泛的適用性,成為了實現高精度時鐘同步的關鍵組件。 一、SYN2407 系列 PTP 時鐘模塊概述 SYN2407 系列
PTP同步時鐘使用注意事項及場景應
在數字化時代,精準時間同步對分布式系統至關重要。PTP(精確時間協議,IEEE1588標準)應運而生,它通過網絡傳輸時間戳,突破傳統同步技術局限,可實現亞微秒級高精度時鐘
如何挑選一款1588PTP時鐘同步服務器?
在當今數字化程度極高的時代,高精度時間同步對于眾多關鍵領域的高效、穩定運行起著決定性作用。PTP(精確時間協議)時鐘作為實現高精度時間同步的



 工商網監
工商網監
評論