") 運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用
運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用

ZMC408CE硬件介紹
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運動控制器可應(yīng)用于各種需要脫機或聯(lián)機運行的場合。
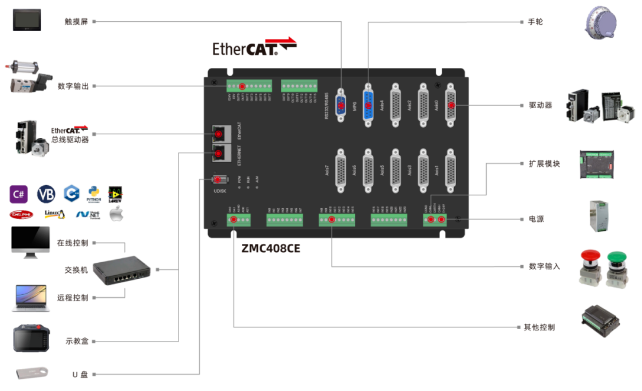
ZMC408CE支持8軸運動控制,最多可擴展至32軸,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨等功能。
ZMC408CE支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE支持8軸運動控制,可采用脈沖軸(帶編碼器反饋)或EtherCAT總線軸,通用IO包含24路輸入口和16路輸出口,部分IO為高速IO,模擬量AD/DA各兩路,EtherCAT最快125us的刷新周期。
ZMC408CE支持8個通道的硬件比較輸出、硬件定時器、運動中精準輸出,還支持8通道PWM輸出,對應(yīng)的輸出口為OUT0-7,支持8個通道同時觸發(fā)硬件比較輸出。
01 ZCAN擴展模塊
ZCAN總線擴展模塊包含兩個系列:ZCAN擴展模塊和ZMIO310-CAN擴展模塊,今天我們主要來介紹一下ZCAN擴展模塊。
ZCAN擴展模塊種類豐富,具體有如下型號。

02 ZCAN擴展模塊的接線
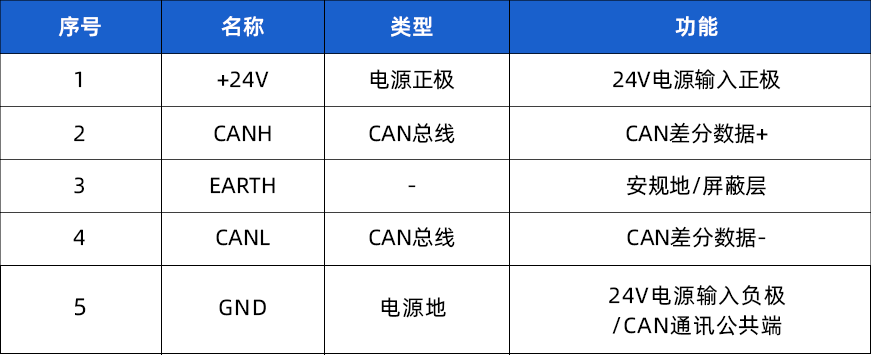
1、CAN總線上連接了多個CAN通訊模塊時,將全部CAN的CANL和CANH端口分別接到一起(CANL接CANL、CANH接CANH)。
2、在CAN總線最兩端接口各并接一個120歐的終端電阻,匹配電路阻抗,保證通訊穩(wěn)定性。(控制器/控制卡這一端需要在CANL和CANH之間接入一個120歐電阻,還有最后一個CAN擴展模塊需要把[撥碼開關(guān)8]撥到ON來表示并入一個120歐姆的電阻)。
3、要保證控制器的主電源的公共端和CAN擴展模塊的主電源的公共端接到一起端(俗稱“共零”),以防止CAN芯片燒壞。
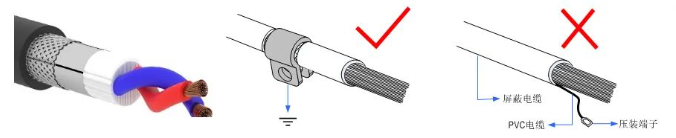
4、干擾嚴重的場合(正常接線重啟后ZCAN擴展板的ALM燈一直亮著),要將通訊線替換成雙絞屏蔽線,屏蔽層可靠接地。
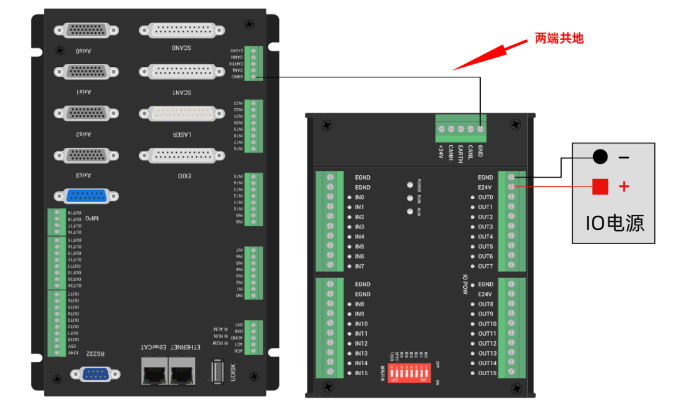
5、ZIO系列擴展模塊均采用雙電源供電,擴展板的主電源和IO單電源使用兩個電源分別供電,這樣可以防止IO的干擾傳給ZCAN擴展模塊的主電源影響通訊。
ZAIO模擬量擴展模塊采用單電源供電,只需要主電源,IO不需要單獨供電。
6、布線還要注意強電和弱電布線要拉開距離,建議20cm以上。
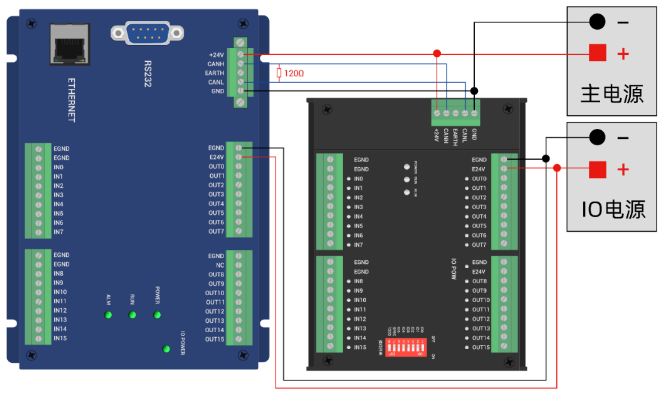
單電源控制器和擴展模塊接線參考
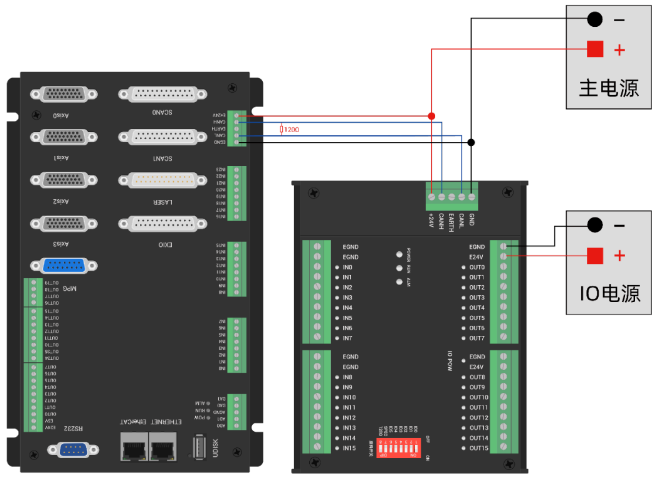
雙電源控制器和擴展模塊接線參考
03 ZCAN擴展模塊的撥碼設(shè)置

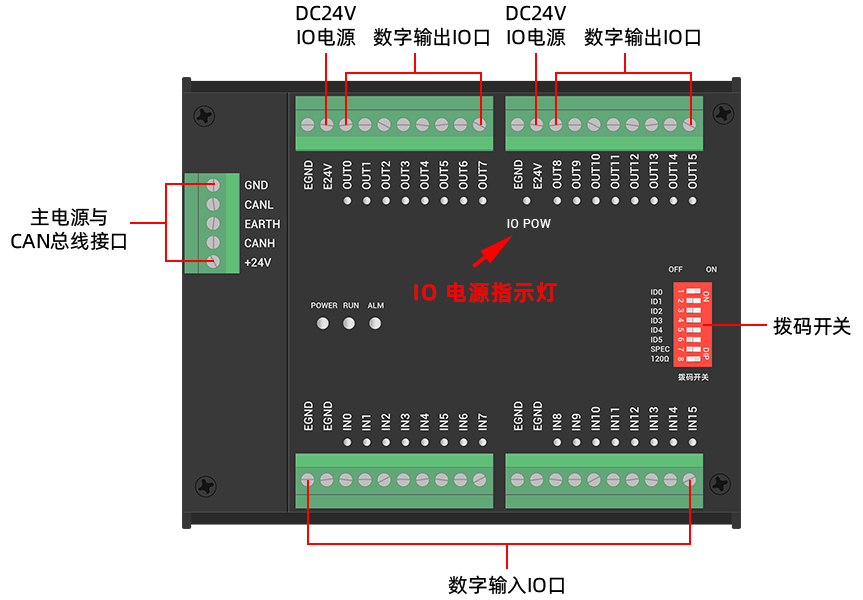
說到ZCAN擴展模塊的撥碼設(shè)置,我們先來了解一下?lián)艽a開關(guān),每塊ZCAN擴展板都有一個紅色的撥碼開關(guān),撥碼開關(guān)具體含義如下。
1、撥碼1-4
4位CAN ID(CAN撥碼地址)用于ZCAN擴展模塊IO地址映射,4位二進制位組合值對應(yīng)值范圍0-15,控制器根據(jù)CAN撥碼地址來設(shè)定對應(yīng)擴展模塊的IO起始地址及AD與DA的起始地址。
不同二進制位組合值對應(yīng)數(shù)字量IO起始編號分配情況如下表。
注:整個控制系統(tǒng)的IO編號不得重復,映射資源時需避開已有編號。

不同二進制位組合值對應(yīng)AD與DA的起始地址分配情況如下表。1-4位撥碼狀態(tài)與對應(yīng)地址ID可參考上表。

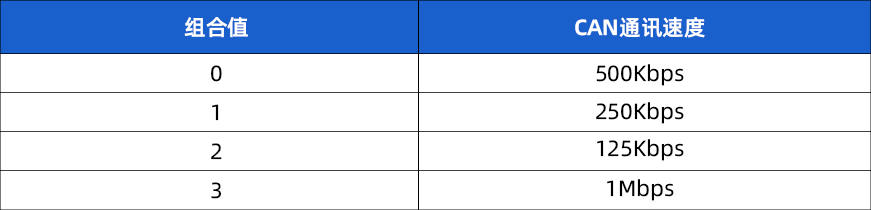
2、撥碼5-6
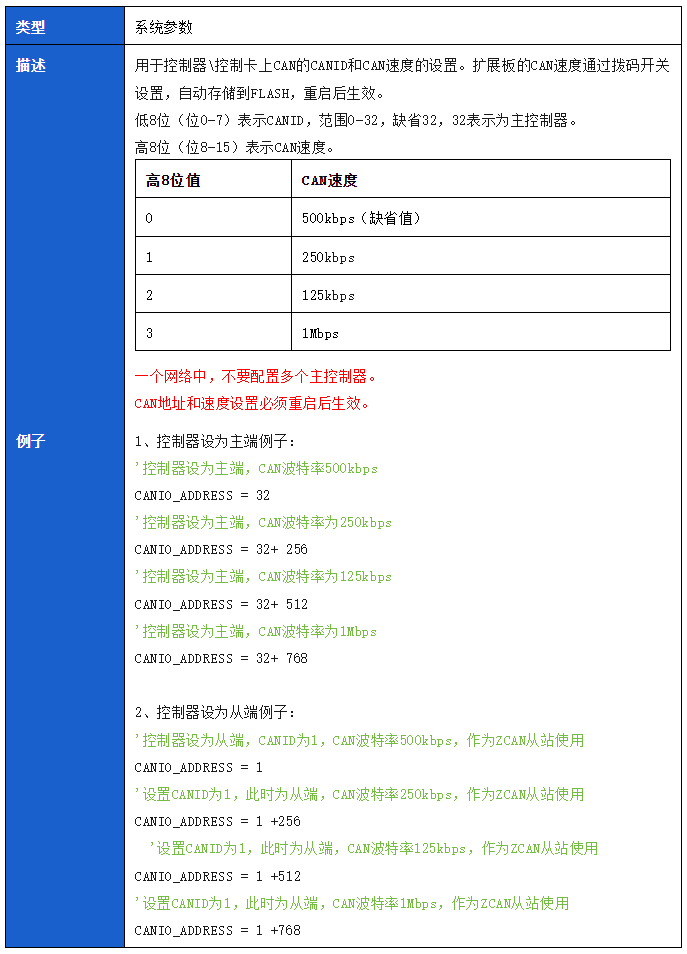
CAN通訊速度,組合值對應(yīng)值范圍0-3,可選四種不同的速度,一般CAN通訊速度默認即可,干擾嚴重可以降低CAN的通訊速度,同時需要通過控制器端通過CANIO_ADDRESS指令來修改控制器端(主端)的CAN通訊速度與ZCAN擴展模塊一致才可以正常通訊。
3、撥碼7
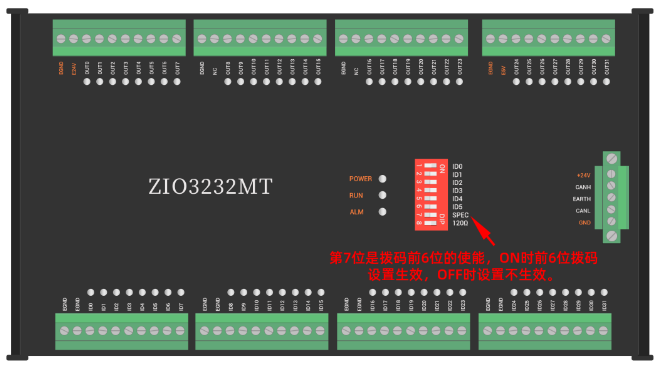
特殊功能預留(ZIO3232MT第7位是撥碼前6位的使能,ON時前6位撥碼設(shè)置生效,OFF時設(shè)置不生效);
4、撥碼8
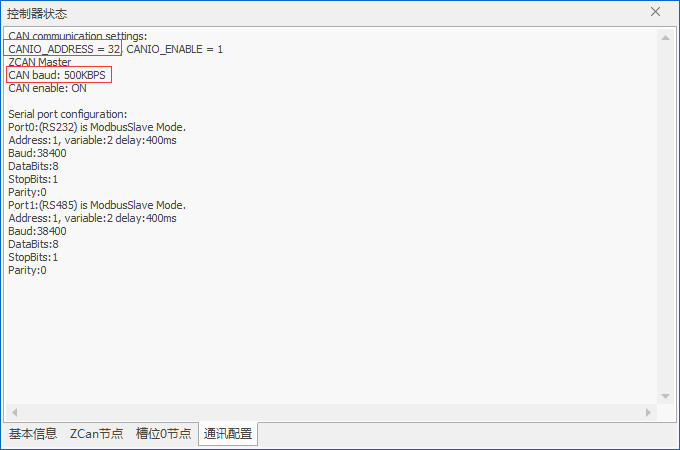
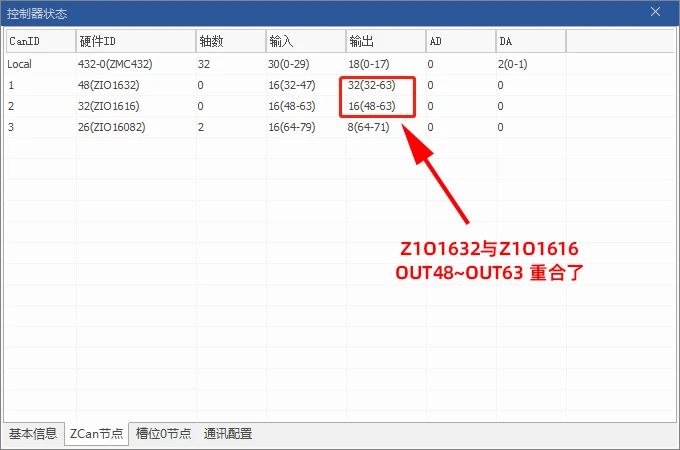
120歐電阻,撥ON表示CANL和CANH間并聯(lián)接入一個120歐電阻,連接了多個CAN通訊模塊時只需要把最后一個CAN通訊模塊的第8位撥為ON即可。(1)CAN撥碼地址的設(shè)置,要求整個控制系統(tǒng)的IO 編號不得重復,控制器端本地IO地址的范圍可以通過RTSys軟件點擊【控制器】-【控制器狀態(tài)】-【Zcan節(jié)點】查看相關(guān)信息。
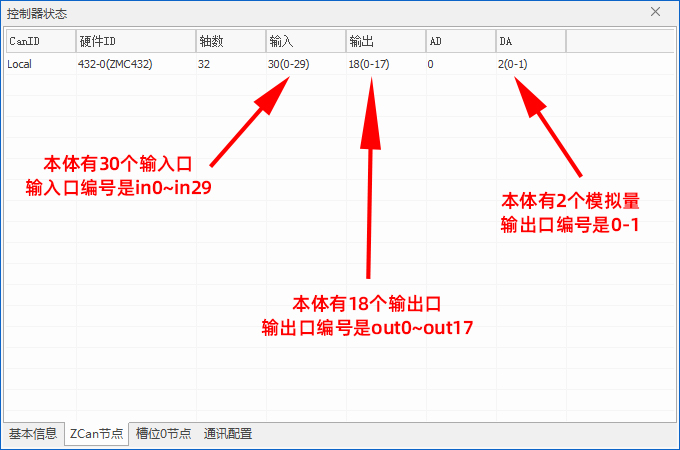
上圖是ZMC432控制器的本地數(shù)字量IO與模擬量IO的分部情況,針對擴展數(shù)字量IO的ZCAN擴展模塊,我們需要要求ZCAN擴展板的IO起始地址要大于輸入口編號的最大值29,同時大于輸出口編號的最大值17,查數(shù)字量IO組合值對照表得CAN地址撥碼的組合值要大于等于1。(2)CAN通訊速度。一般默認即可,都撥到OFF,此時默認的波特率為500kbps。
(3)特殊功能預留,一般撥到OFF (ZIO3232MT第7位要撥到ON)。
(4)最后一個CAN擴展模塊第8位要撥到ON,把末端的120歐匹配電阻加入CAN網(wǎng)絡(luò)。
完成CAN擴展模塊的接線和撥碼開關(guān)的設(shè)置后需要把控制器和擴展模塊斷電重啟后生效。
04 ZCAN擴展模塊功能驗證
1、斷電重啟后,觀察ZCAN擴展模塊的ALM是否熄滅,擴展模塊如果和主端控制器正常通訊上的話,ZCAN擴展模塊的燈應(yīng)該是Power[亮]、Run[亮]、Alarm/ALM[滅](下圖ALM燈亮表示異常)。
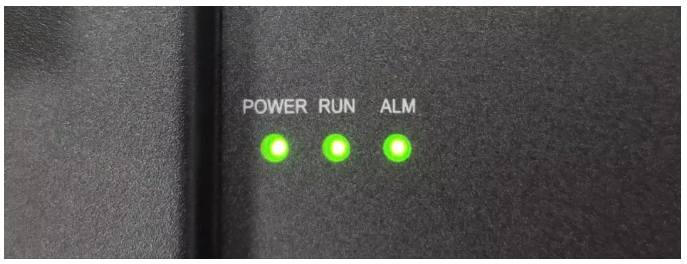
IO的電源是否正常。(下圖IOPOW燈亮表示IO供電正常)。

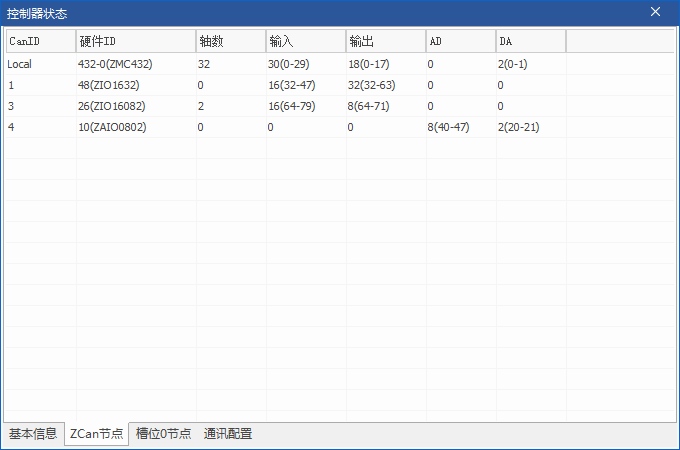
2、通過RTSys軟件點擊【控制器】-【控制器狀態(tài)】-【Zcan節(jié)點】可查看到各個ZCAN擴展模塊的IO起始編號等信息。
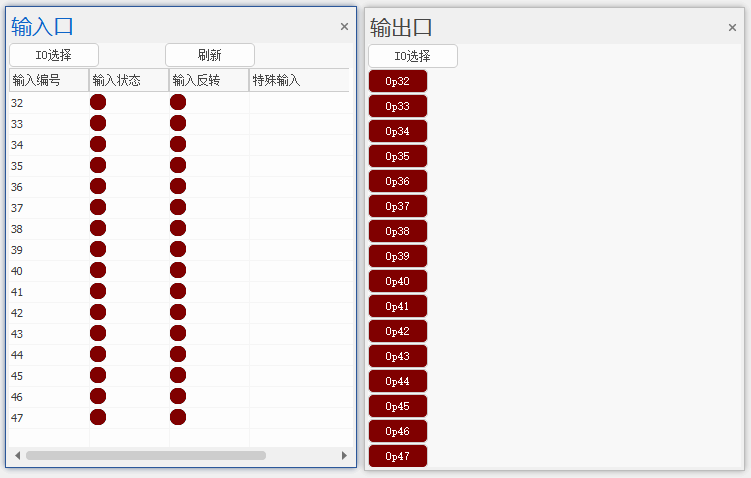
3、ZCAN擴展板IO口監(jiān)控。RTSys軟件點擊【工具】-【輸入口/輸出口】-【IO選擇】,即可監(jiān)控對應(yīng)IO口的IO信息。
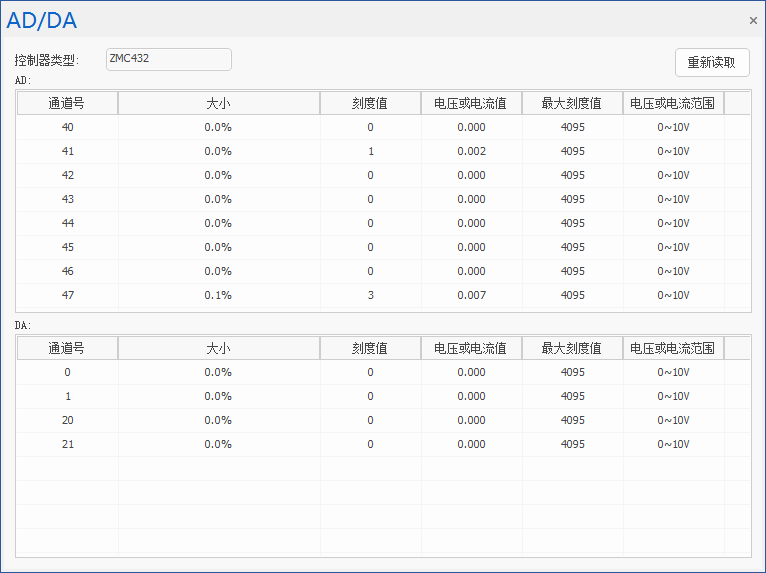
4、ZCAN擴展板模擬量監(jiān)控。RTSys軟件點擊【工具】-【AD/DA】;即可監(jiān)控對應(yīng)的模擬量輸入輸出口的相關(guān)信息,ZAIO0802擴展模塊的模擬量輸入與輸出都是12位的,所以最大刻度值檔位要手動選擇4095。
5、ZCAN擴展軸的測試。CAN總線擴展方式擴展脈沖軸時,可選ZIO16082,擴展兩個脈沖軸。擴展軸需要進行軸映射的操作,采用AXIS_ADDRESS指令映射,映射規(guī)則如下。
AXIS_ADDRESS(軸號)=(32*0)+ID '擴展板的本地軸接口0 AXIS_ADDRESS(軸號)=(32*1)+ID '擴展板的本地軸接口1
ID為擴展板1-4位地址撥碼的組合值。映射完成后設(shè)置ATYPE等軸參數(shù)后就可以使用擴展軸。
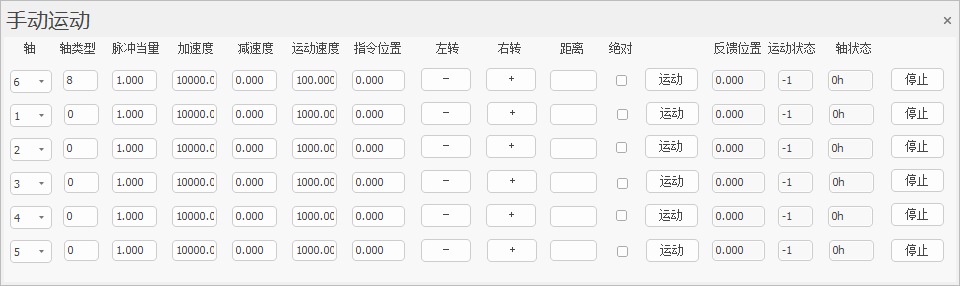
ATYPE(6)=0 '設(shè)為虛擬軸 '軸6映射到ZCAN擴展模塊ID為2的擴展板的軸接口1上 AXIS_ADDRESS (6)=2+(32*1) ATYPE(6)=8 'ZCAN擴展軸類型的脈沖軸 '一般脈沖當量設(shè)置為電機運動1mm或1度需要的脈沖數(shù) UNITS(6)=100 '脈沖當量100 SPEED(6)=100 '速度100units/s ACCEL(6)=1000 '加速度1000units/s^2 DECEL(6)=1000 '減速度1000units/s^2
參考上述例程對ZCAN擴展軸軸號進行映射后,便可點擊【工具】-【手動運動】現(xiàn)在對應(yīng)的軸號,進行左右點動的測試。如果電機運動比較慢看不出來,可以以10的倍數(shù)慢慢提升脈沖當量的值,測試看效果。
05 ZCAN擴展模塊常見問題分析
常見問題1:CAN擴展模塊的Power[亮]、Run[亮]、Alarm[亮]和控制器通訊不上,RTSys軟件在【控制器】-【控制器狀態(tài)】-【Zcan節(jié)點】界面也看不到擴展模塊的信息。
解決建議如下:
A、參考第二節(jié)的接線內(nèi)容,排查接線的電源是否正常(ZIO模塊的主電源是否24V,IO端子的電源是否24V),通過萬用表排查導線是否接線良好,是否有接觸不良的情況,CAN通訊線纜是否使用雙絞屏蔽線,屏蔽層可靠接地,擴展板是否已使用雙電源供電。
B、控制器端是否接120歐電阻,最后面一個擴展模塊撥碼開關(guān)8是否撥到ON。
兩端的CAN的地要在同一個地:要保證控制器的主電源的公共端和ZCAN擴展模塊ZIO模塊的主電源的GND接到一起端(俗稱“共零”),同一“地”電勢以防止CAN芯片燒壞。
C、有些擴展模塊(例如ZIO3232MT)需要把撥碼開關(guān)7撥上去才使能,可以把撥碼開關(guān)7撥到ON,然后斷電重啟查看。
D、撥碼開關(guān)是否設(shè)置正確,沒有和本體及其他擴展模塊有IO地址的沖突。可以通過RTSys軟件點擊【控制器】-【控制器狀態(tài)】-【Zcan節(jié)點】可查看到各個ZCAN擴展模塊的IO起始編號等信息。
E、是否存在干擾源,把控制器和擴展模塊的所有IO端子及軸接口等其他接線端子排都拔下來,其他無關(guān)的設(shè)備先斷電,然后斷電重啟看看是否可以通訊上。
F、控制器的CAN是否是主端模式(CANIO_ADDRESS的bit5有被置1,例如:CANIO_ADDRESS=32 ),CAN通訊的波特率和擴展模塊是否一致。可以通過RTSys軟件點擊【控制器】-【控制器狀態(tài)】-【通訊配置】可查看到各個CAN主站設(shè)置等詳細信息。
G、查看硬件是否被燒壞,可替換控制器及擴展模塊測試查看。
常見問題2:擴展模塊有一些IO響應(yīng)正常,有一些IO響應(yīng)異常。
解決建議:通過RTSys軟件點擊【控制器】-【控制器狀態(tài)】-【Zcan節(jié)點】可查看到各個ZCAN擴展模塊的IO編號范圍是否有沖突。
06 ZCAN擴展模塊相關(guān)指令說明
1、CANIO_ADDRESS -- CAN通訊設(shè)置
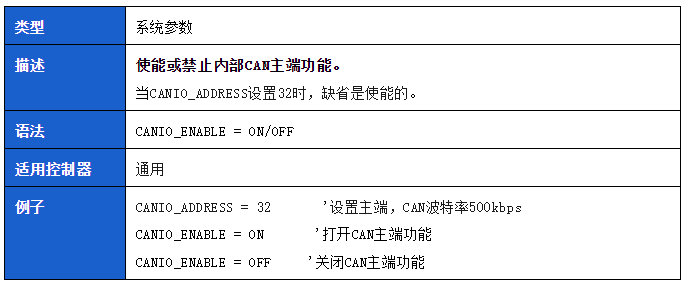
2、CANIO_ENABLE -- CAN使能
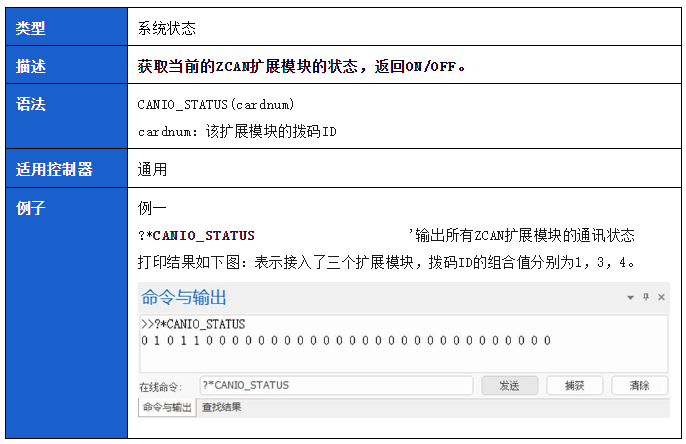
3、CANIO_STATUS -- CAN擴展板通訊狀態(tài)查詢
本次,正運動技術(shù)運動控制器/運動控制卡配套ZCAN總線ZIO模塊的使用,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運動小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運動技術(shù)銷售工程師。
本文由正運動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學習,一起提高中國智能制造水平。文章版權(quán)歸正運動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
審核編輯 黃宇
-
運動控制器
+關(guān)注
關(guān)注
2文章
484瀏覽量
26043 -
總線
+關(guān)注
關(guān)注
10文章
3040瀏覽量
91660 -
ethercat
+關(guān)注
關(guān)注
19文章
1508瀏覽量
45183 -
正運動技術(shù)
+關(guān)注
關(guān)注
0文章
125瀏覽量
892
發(fā)布評論請先 登錄

運動控制看的更清楚細致!RTSys示波器功能簡介 #正運動技術(shù) #運動控制器 #運動控制系統(tǒng) #運動控制卡
六軸運動控制卡
EtherCAT運動控制卡之ECI2820如何使用
正運動技術(shù)運動控制器EtherCAT總線快速入門
基于CH365的PCI總線運動控制卡的設(shè)計

基于PCI總線的STM32運動控制卡的設(shè)計

研控運動控制卡的編程小技巧
運動控制卡能仿真嗎?

阿爾泰科技 運動控制卡的簡要介紹
EtherCAT運動控制卡的總線軸參數(shù)設(shè)置和軸運動
PLC、運動控制卡、運動控制器,怎么區(qū)分?如何選用?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論