 結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(下)
結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(下)

LimoPro小車建圖導航
引言
前景提要:我們在上文介紹了使用LIMOcobot實現一個能夠執行復雜任務的復合機器人系統的應用場景的項目,從以下三個方面:概念設計、系統架構以及關鍵組件。
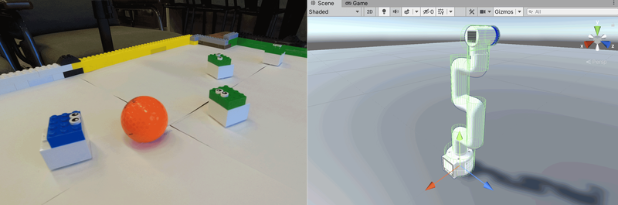
本文主要深入項目內核的主要部分,同樣也主要分為三個部分:機械臂的視覺抓取,LIMOPro在ROS中的功能,建圖導航避障等,以及兩個系統的集成。
設備準備
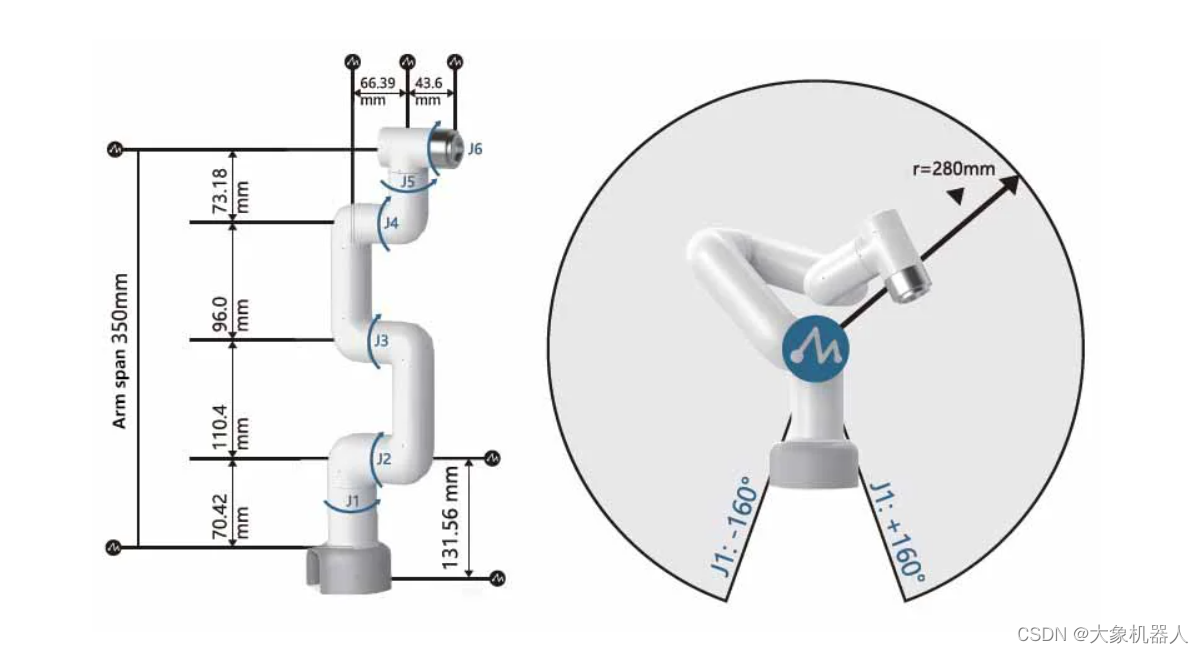
myCobot280M5stack
myCobotAdaptiveGripper
myCobotCameraFlange2.0
LIMOPRO
機械臂視覺抓取
這是機械臂安裝AdaptiveGripper,和cameraflange2.0之后的樣子。

我們是用的cameraflange2.0是一款2D的相機,他并不能夠依靠他相機本身來獲取到一個物體的三維(長寬高),但我們可以使用標記物來獲得到目標物體的都長寬高。常見的有ArUco,STag,AR碼,AprilTags。今天我們用STag算法來做視覺識別。
STag標記系統
STag是一個為了高穩定性和精確的三位定位而設計的標記系統。它特別適用于環境中有遮擋和光照變化的情況。
下面有一個視頻展示了STag標記碼,ARToolKit+,ArUco,RUNE-Tag碼在同一個環境下的識別效果。
https://www.youtube.com/watch?v=vnHI3GzLVrY
可以從視頻中看出來STag對環境變化的強大適應性和在復雜場景下的高可靠性,使其成為在要求高精度跟蹤和定位的應用中的首選。還有一篇論文專門講解STag穩定的基準標記系統,感興趣的可以自己點擊鏈接去了解一下。
https://arxiv.org/abs/1707.06292
STag系統可以是適配與ROS,有ROS軟件包,用的是c++編寫的,也能夠支持python進行使用。
C++/ROS:GitHub - bbenligiray/stag: STag: A Stable Fiducial Marker System
Python:GitHub - ManfredStoiber/stag-python: Python Package for STag - A Stable, Occlusion-Resistant Fiducial Marker System
用python簡單寫一個例子
importcv2
importstag
importnumpyasnp
#加載相機參數
camera_params=np.load("camera_params.npz")
mtx,dist=camera_params["mtx"],camera_params["dist"]
#初始化STag檢測器
stag_detector=stag.detectMarkers(mtx,dist)
#初始化視頻捕獲
cap=cv2.VideoCapture(0)
whilecap.isOpened():
ret,frame=cap.read()
if notret:
break
#應用相機校正(可選)
frame_undistorted=cv2.undistort(frame,mtx,dist, None,mtx)
#檢測STag標記
(corners,ids,rejected_corners) =stag.detectMarkers(frame_undistorted, 21)
#繪制檢測到的標記及其ID
stag.drawDetectedMarkers(frame_undistorted,corners,ids)
#繪制被拒絕的候選區域,顏色設為紅色
stag.drawDetectedMarkers(frame_undistorted,rejected_corners,border_color=(255, 0, 0))
#顯示結果
cv2.imshow("STagDetection",frame_undistorted)
ifcv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()

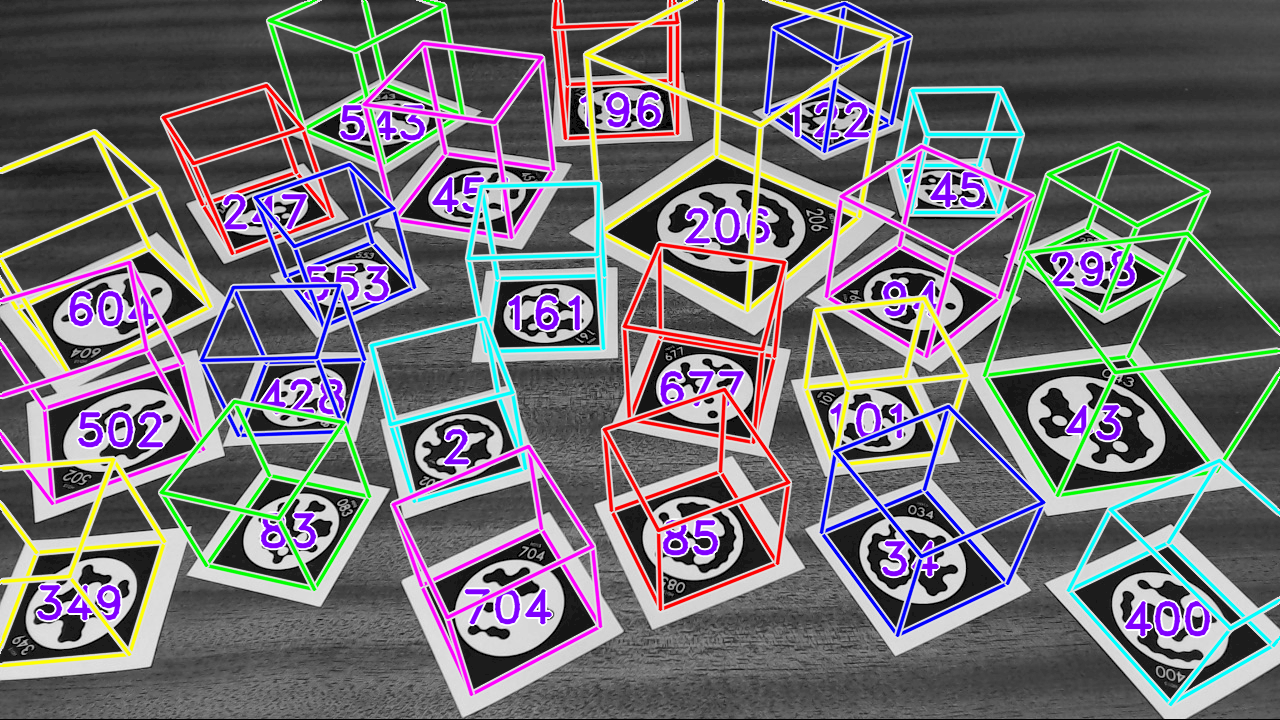
標記了STag碼之后可以獲得標記碼四個角的參數,
(array([[[257., 368.],
[185., 226.],
[345., 162.],
[420., 302.]]],dtype=float32),)
給定坐標過后,可以用opencv的‘cv2.solvePnP'函數來計算標記相對于相機的旋轉和偏移量。這個函數需要標記的3D坐標(在物理世界中的位置)和相應的2D圖像坐標(即檢測到的角點),以及相機的內參和畸變系數。solvePnP會返回旋轉向量(rvec)和平移向量(tvec),它們描述了從標記坐標系到相機坐標系的轉換。這樣,就可以根據這些參數計算出標記的位置和朝向。
以下是偽代碼方便理解。
defestimate_pose(corners):
#DosomecalculationswithPnP,camerarotationandoffset
returnrvec,tvec
defconvert_pose_to_arm_coordinates(rvec,tvec):
#將旋轉向量和平移向量轉換為機械臂坐標系統中的x,y,z,rx,ry,rz
returnx,y,z,rx,ry,rz
defconvert_grab(object_coord_list):
#Dosomecalculationstoconvertthecoordinatesintograspingcoordinatesfortheroboticarm
returngrab_position
cap=cv2.VideoCapture(0)
whilecap.isOpened():
ret,frame=cap.read()
ifnotret:
break
maker=(corners,ids,rejected_corners)=stag.detectMarkers(image,21)
rvec,tvec=stag.estimate_pose(marker)
object_coord_list=convert_pose_to_arm_coordinates(rvec,tvec)
grab_position=convert_grab(object_coord_list)
mycobot.move_to_position(grab_position)
機械臂控制
以上的代碼就是大概的抓取的流程,比較復雜的部分解決了,接下來我們處理機械臂的運動控制,用到的是pymycobot庫
frompymycobotimportMyCobot
#Createaninstanceandlinktheroboticarm
mc=MyCobot('com3',115200)
#Controltheroboticarmwithangle
mc.send_angles(angles_list,speed)
#Controltheroboticarmusingcoordinates
mc.send_coords(coords_list,speed,mode)
#Controlgripper,value-0~100
mc.set_gripper_value(value,speed)
因為機械臂的開放接口比較多,我們只需要使用坐標控制,夾爪控制就好了。
LimoPro建圖導航
完成了機械臂抓取部分的功能,接下來我們要實現小車的建圖導航模塊了。
首先我們要見圖,有了地圖之后才能夠在地圖上進行導航,定點巡航等一些的功能,目前有多種建圖的算法,因為我們搭建的場景并不是很大,環境相對于靜態我們選擇使用gmapping算法來實現。
建圖
Gmapping是基于濾波SLAM框架的常用開源SLAM算法。Gmapping有效利用了車輪里程計信息,對激光雷達的頻率要求不高,在構建小場景地圖時,所需的計算量較小且精度較高。這里通過使用ROS封裝了的GMapping功能包來實現limo的建圖。
注:以下的功能都是封裝好的可以直接使用
首先需要啟動雷達,打開一個新終端,在終端中輸入命令:
roslaunchlimo_bringuplimo_start.launchpub_odom_tf:=false
然后啟動gmapping建圖算法,打開另一個新終端,在終端中輸入命令:
roslaunchlimo_bringuplimo_gmapping.launch
成功啟動之后會打開rviz可視化工具,這時候看到的界面如圖
這時候就可以把手柄調為遙控模式,控制limo建圖了。
構建完地圖之后,需要運行以下命令,把地圖保存到指定目錄:
1、切換到需要保存地圖的目錄下,這里把地圖保存到~/agilex_ws/src/limo_ros/limo_bringup/maps/,在終端中輸入命令:
cd~/agilex_ws/src/limo_ros/limo_bringup/maps/
2、切換到/agilex_ws/limo_bringup/maps之后,繼續在終端中輸入命令:
rosrunmap_servermap_saver-fmap1
map1為保存地圖的名稱,保存地圖時應避免地圖的名稱重復
導航
前面我們用了gmapping來進行建圖,我們現在來進行導航。導航的關鍵是機器人定位和路徑規劃兩大部分。針對這兩個核心,ROS提供了以下兩個功能包。
(1)move_base:實現機器人導航中的最優路徑規劃。
(2)amcl:實現二維地圖中的機器人定位。
在上述的兩個功能包的基礎上,ROS提供了一套完整的導航框架,
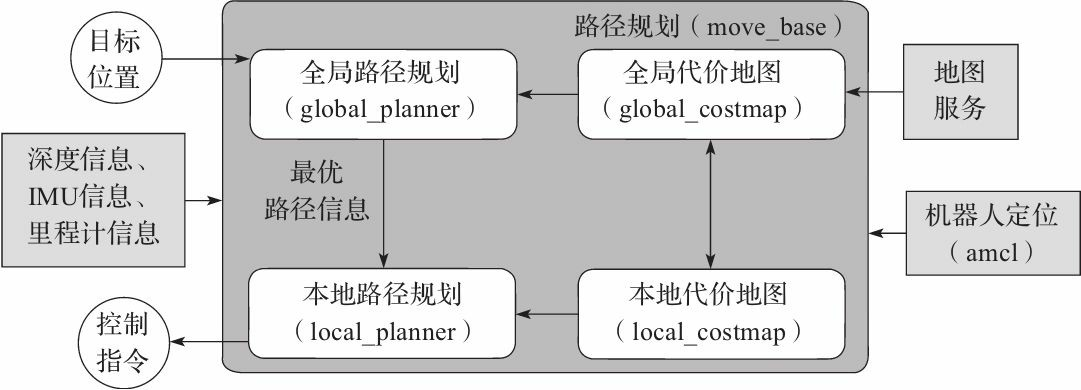
機器人只需要發布必要的傳感器信息和導航的目標位置,ROS即可完成導航功能。在該框架中,move_base功能包提供導航的主要運行、交互接口。為了保障導航路徑的準確性,機器人還要對自己所處的位置進行精確定位,這部分功能由amcl功能包實現。
在導航的過程中,運用了兩種算法DWA和TEB算法,這兩種算法分別處理全局路徑和局部路徑規劃,來保證小車能夠安全的前進到目的地,避免與障礙物發生碰撞。
(1)首先啟動雷達,在終端中輸入命令:
roslaunchlimo_bringuplimo_start.launchpub_odom_tf:=false
(2)啟動導航功能,在終端中輸入命令:
roslaunchlimo_bringuplimo_navigation_diff.launch
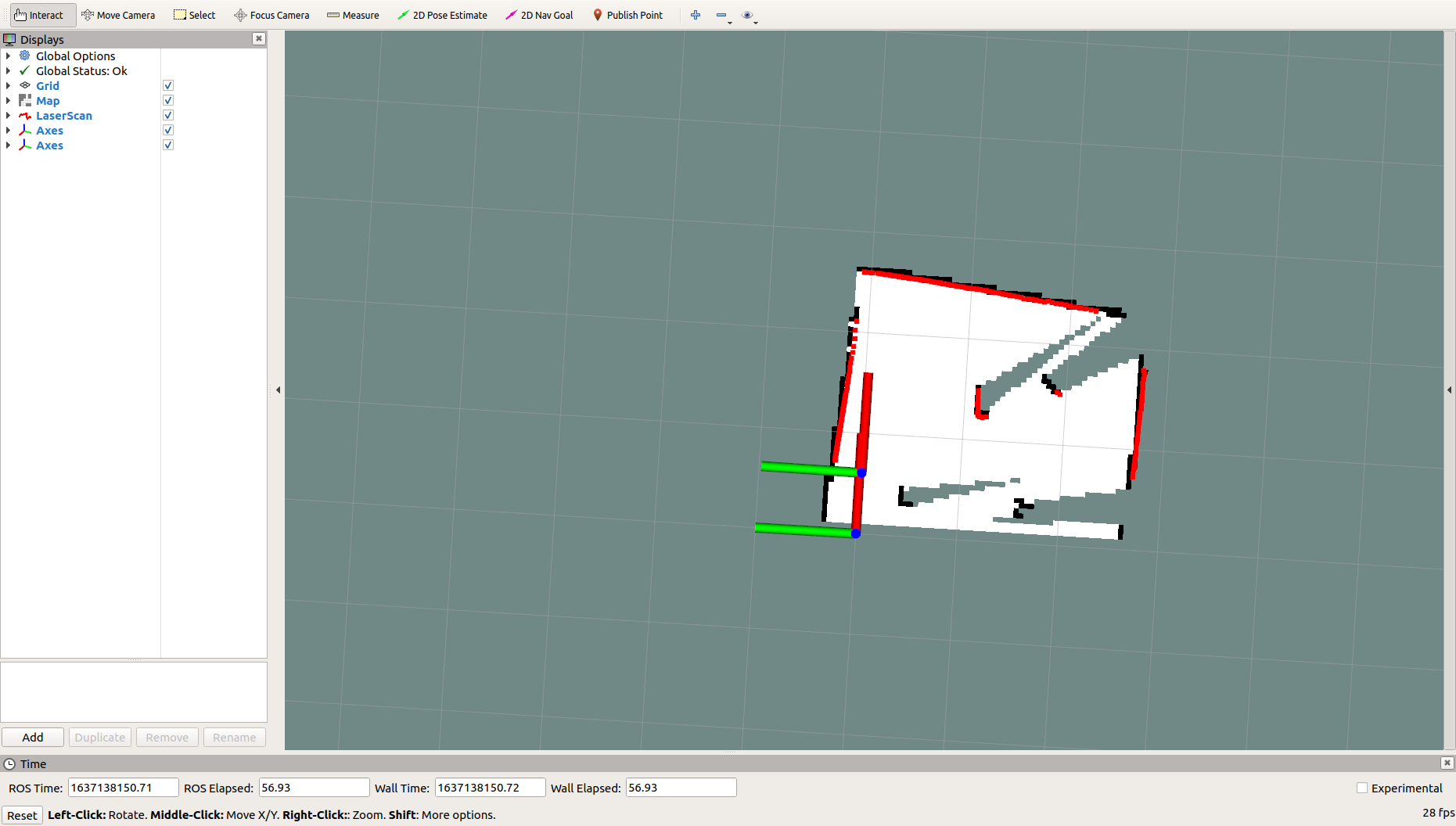
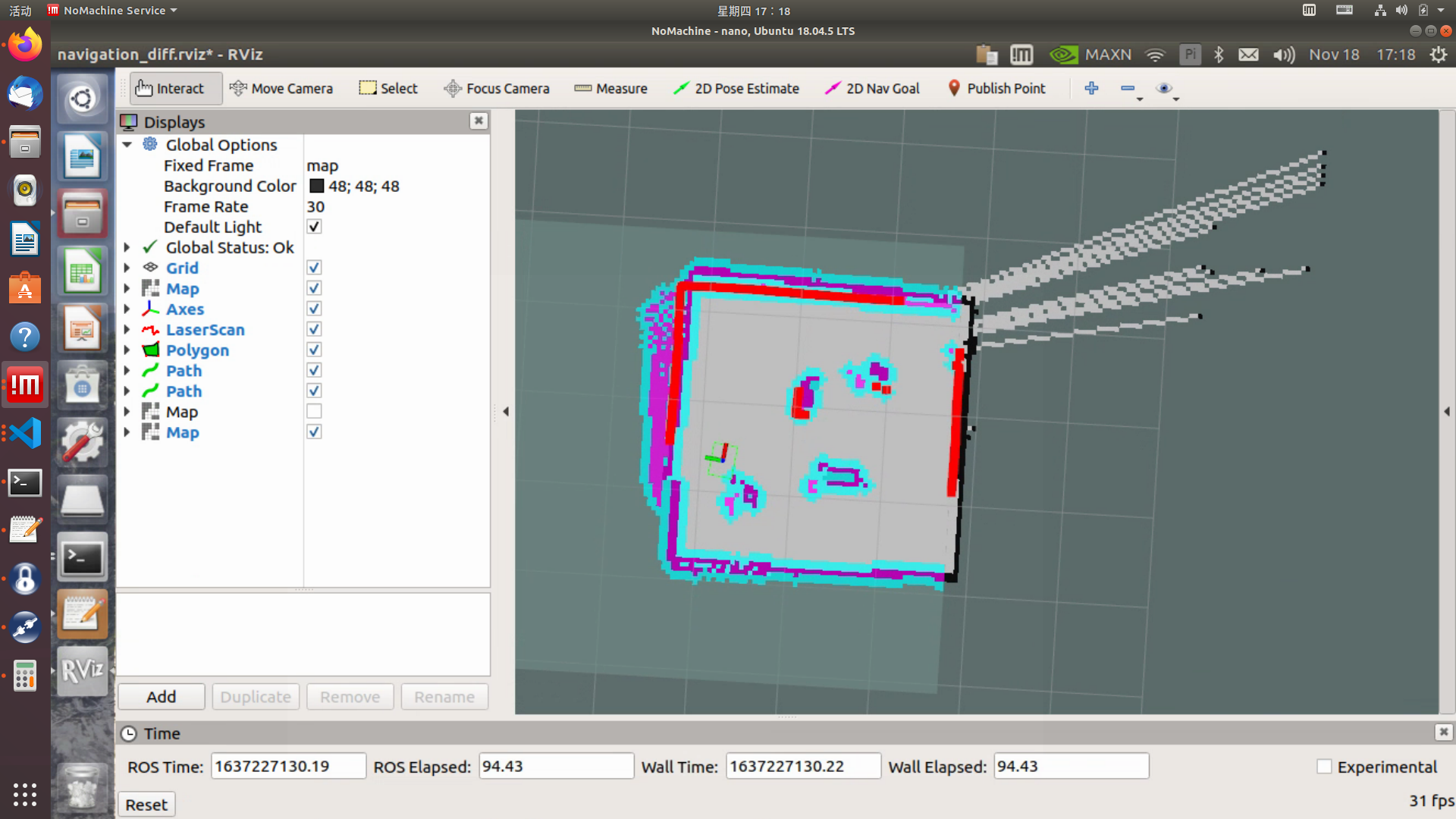
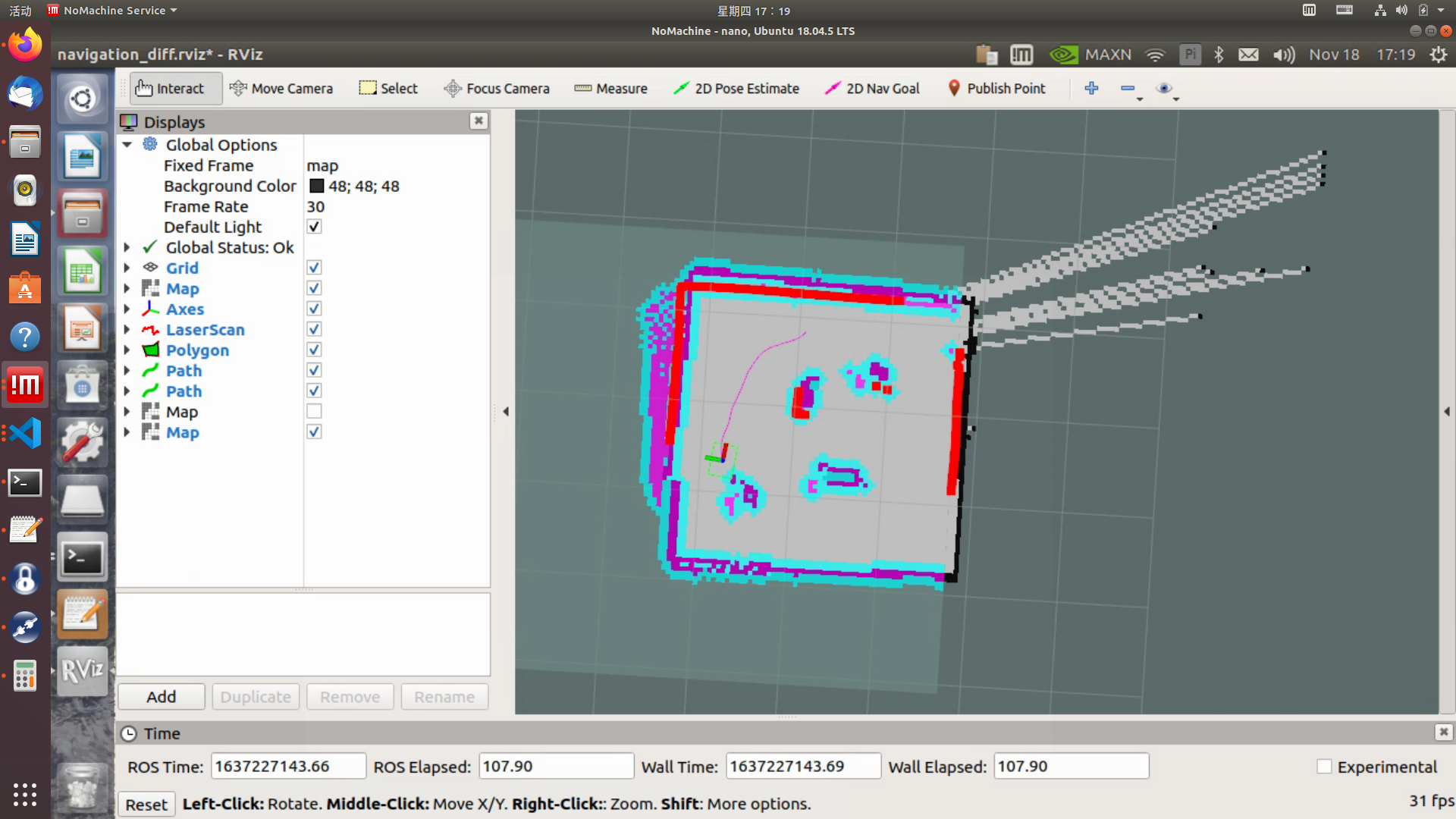
啟動成功之后會打開rviz界面,如圖
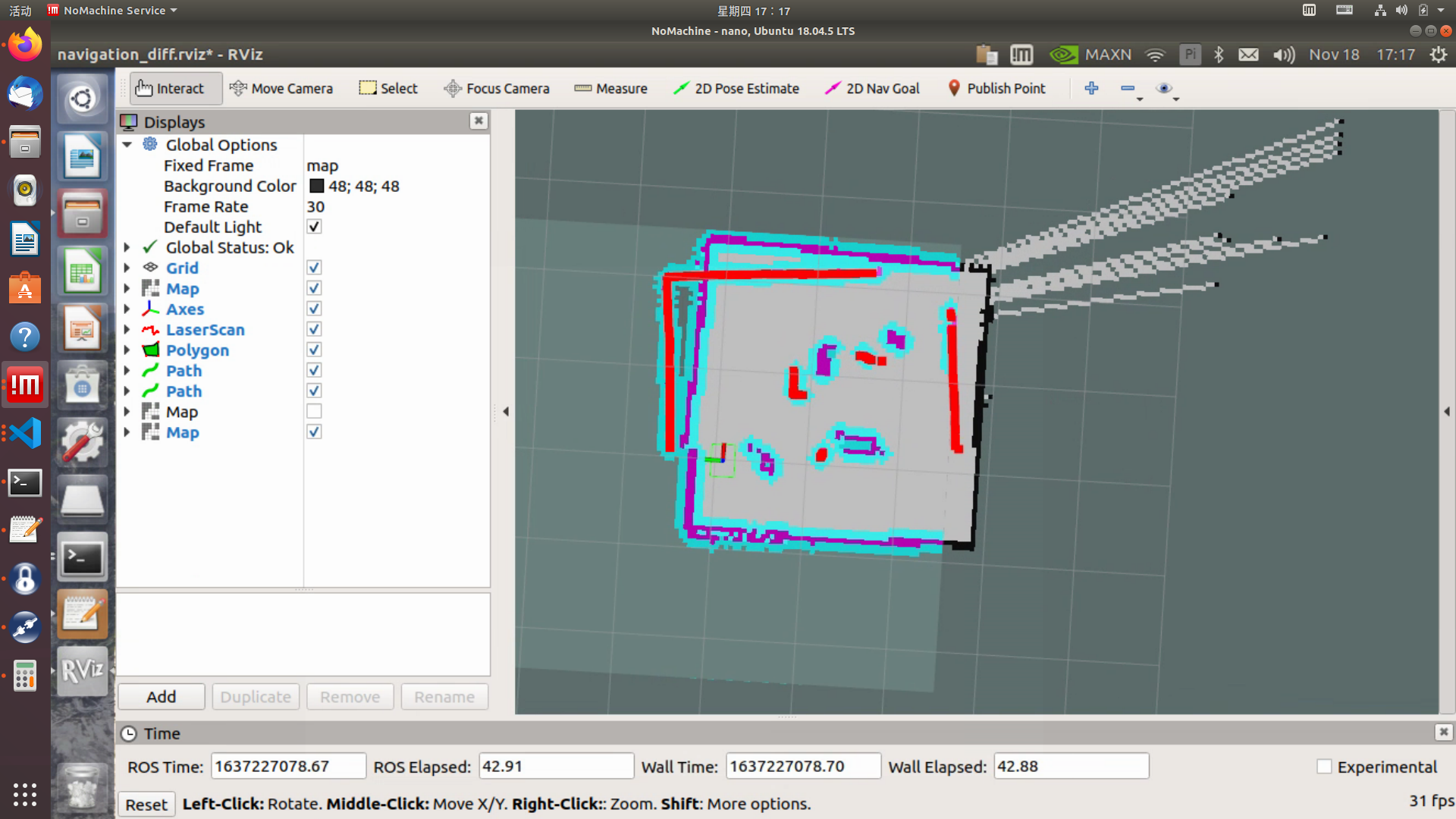
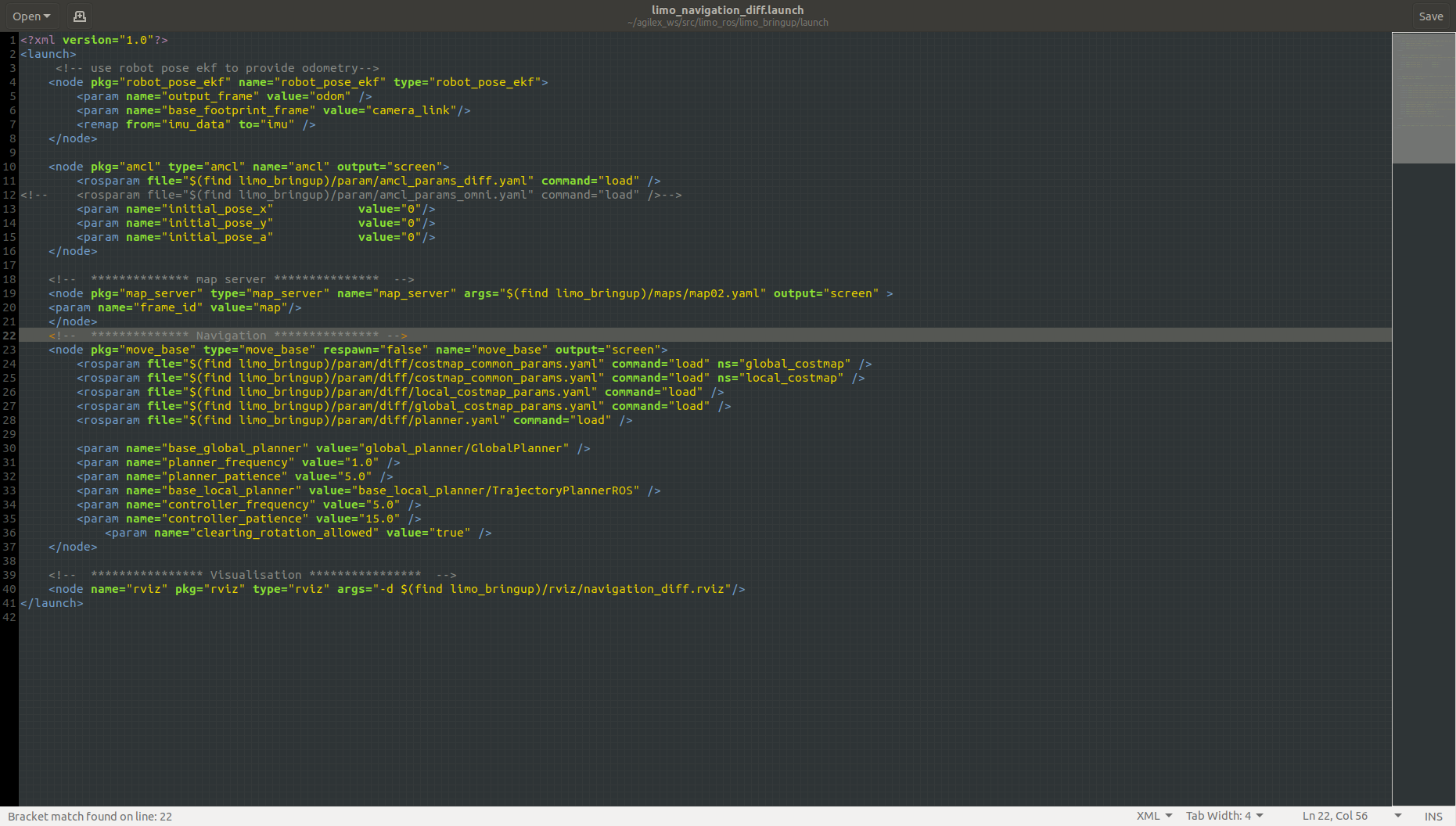
?編輯我們需要把剛才建的地圖給導進去,請打開limo_navigation_diff.launch文件修改參數,文件所在目錄為:~/agilex_ws/src/limo_ros/limo_bringup/launch。把map02修改為需要更換的地圖名稱。
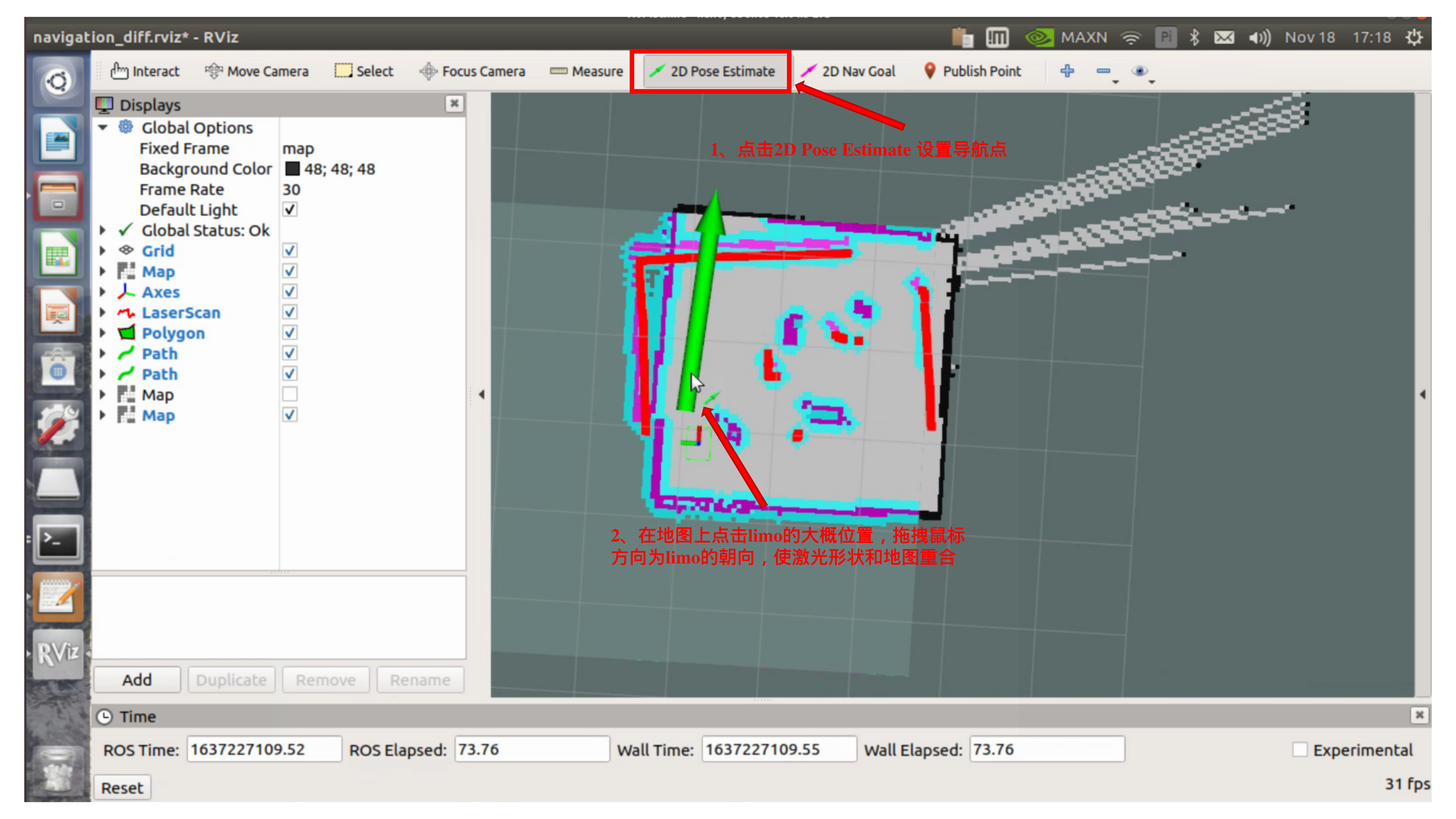
開啟導航之后,會發現激光掃描出來的形狀和地圖沒有重合,需要我們手動校正,在rviz中顯示的地圖上矯正底盤在場景中實際的位置,通過rviz中的工具,發布一個大概的位置,給limo一個大致的位置,然后通過手柄遙控limo旋轉,讓其自動校正,當激光形狀和地圖中的場景形狀重疊的時候,校正完成。操作步驟如圖:
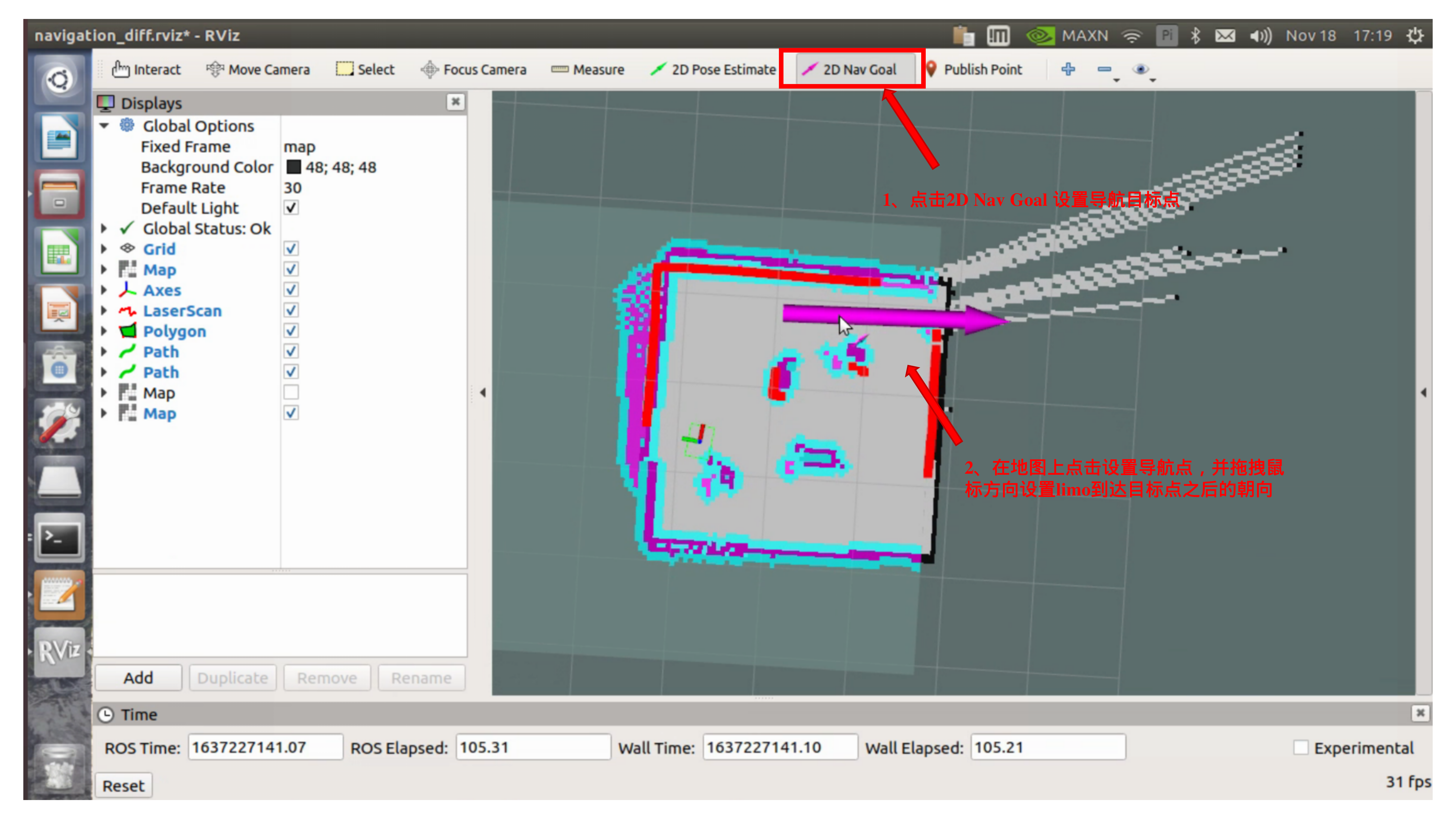
校正完成后
通過2DNavGoal設置導航目標點
路徑巡檢
如果要在一條路上來回運動的話,我們要啟用路徑巡檢功能,后續會使用上這個功能。
(1)首先啟動雷達,開啟一個新的終端,在終端中輸入命令:
roslaunchlimo_bringuplimo_start.launchpub_odom_tf:=false
(2)啟動導航功能,開啟一個新的終端,在終端中輸入命令:
roslaunchlimo_bringuplimo_navigation_diff.launch
注:如果是阿克曼運動模式,請運行
roslaunchlimo_bringuplimo_navigation_ackerman.launch
(3)啟動路徑記錄功能,開啟一個新的終端,在終端中輸入命令:
roslaunchagilex_pure_pursuitrecord_path.launch
路徑記錄結束之后終止路徑記錄程序,在終端中輸入命令為:Ctrl+c
(4)啟動路徑巡檢功能,開啟一個新的終端,在終端中輸入命令:
注:把手柄調至指令模式
roslaunchagilex_pure_pursuitpure_pursuit.launch
兩個系統的集成
上面分布完成了myCobot機械臂視覺的抓取,LIMO的建圖導航,路徑巡檢功能,現在我們需要把它們集成在ROS系統上。我們預設的場景是,LIMO進行定點的巡檢,當遇到了標志物的時候停止運動,等待機械臂執行抓取物體,完成之后LIMO移動到下一個點位。
功能節點分布
在ROS(RobotOperatingSystem)中實現一個功能的流程涉及到多個步驟和組件,包括節點(nodes)、話題(topics)、服務(services)、參數服務器(parameterserver)和動作(actions)。根據ROS的功能節點架構,我們確定了節點的分布和它們交互的方式:
1.圖像識別節點(ImageRecognitionNode)
職責:持續接收來自攝像頭的圖像流,使用圖像識別算法(如OpenCV或深度學習模型)來檢測特定的標記物。
輸入:來自攝像頭的圖像流。
輸出:當檢測到標記物時,發布一個消息到一個特定的話題(如/marker_detected)。
2.控制節點(ControlNode)
職責:管理機器人的移動,包括啟動、停止和繼續巡檢。
輸入:訂閱/marker_detected話題以監聽圖像識別節點的輸出。也可能訂閱一個專門用于接收手動控制指令的話題(如/control_commands)。
輸出:向機器人底層控制系統(如驅動電機的節點)發送控制命令。
3.任務執行節點(TaskExecutionNode)
職責:執行遇到標記物后的特定任務,這些任務可以是數據采集、狀態報告等。
輸入:監聽來自控制節點的指令,這些指令指示何時開始執行任務。
輸出:任務完成的狀態反饋,可能會發送到控制節點或一個專門的狀態話題(如/task_status)。
4.導航和路徑規劃節點(NavigationandPathPlanningNode)
職責:處理機器人的路徑規劃和導航邏輯,確保機器人可以在環境中安全移動。
輸入:接收來自控制節點的指令,用于啟動、停止或調整導航路徑。
輸出:向機器人底層控制系統發送導航指令,如目標位置、速度和方向。
總結
這個場景算是初步完成了,其實還可以添加許多細節的,比如說在行徑的過程中增添一些移動的障礙物,又或者設定一個紅綠燈之類的物體,更加接近真實的場景。如果你們覺得有什么需要改善的地方,又或者說你想用LIMOcobot來做一些什么,盡管暢所欲言,你的回復和點贊就是我們更新最大的動力!
-
機器人
+關注
關注
213文章
31074瀏覽量
222191 -
機械臂
+關注
關注
14文章
596瀏覽量
26120 -
大象機器人
+關注
關注
0文章
86瀏覽量
376
發布評論請先 登錄
使用myCobot 280 Jeston Nano進行物體精確識別追蹤
多軸機器人的發展趨勢
基于Jetson Nano的六軸協作機械臂myCobot
myCobot機械臂應用于Unity機器人編程實戰課

開源六軸機械臂myCobot 280末端執行器實用案例解析


大象機器人六軸協作機械臂myCobot 320 進行手勢識別!

結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(上)
大象機器人myCobot 320六軸協作機械臂用戶開箱!

大象機器人開源協作機械臂機械臂接入GPT4o大模型!

大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品




 工商網監
工商網監
評論