 開源六軸機械臂myCobot 280末端執行器實用案例解析
開源六軸機械臂myCobot 280末端執行器實用案例解析

Intrduction
大家好,今天這篇文章的主要內容是講解以及使用一些myCobot 280 的配件,來了解這些末端執行器都能夠完成哪些功能,從而幫助大家能夠正確的選擇一款適合的配件來進行使用。
本文中主要介紹4款常用的機械臂的末端執行器。
Product
myCobot 280 M5Stack
myCobot 280 系列是世界最小最輕的六軸協作機器人,體積小巧但功能強大,具備豐富的軟硬件交互方式及多樣化兼容拓展接口,支持多平臺的二次開發,有效幫助用戶實現多場景的應用。
主要適用于人工智能相關學科,個人創意開發,商業應用探索等場景。myCobot 280的驅動庫支持二次開發,搭配拼圖編程,代碼編程,手動拖拽應用,機器人仿真編程等多種開發控制方式,給用戶提供了多種控制方式的選擇。

環境準備
機械臂:myCobot 280 M5stack
編程語言:Python,myBlockly
操作系統: windows 10/11
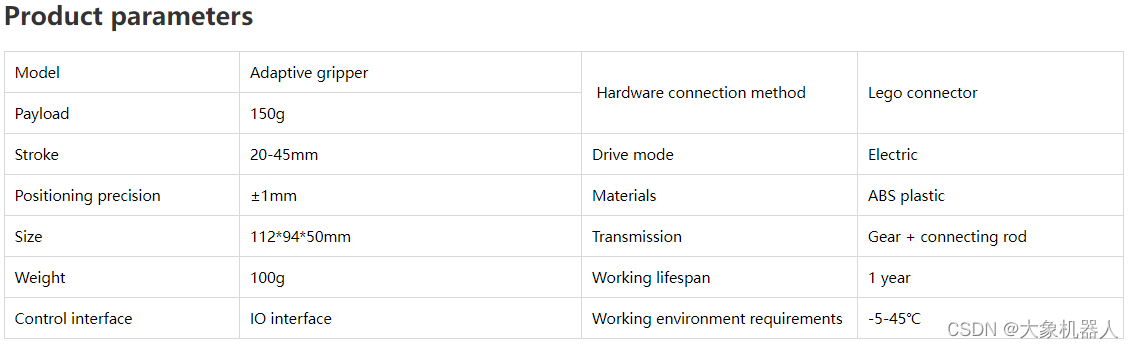
myCobot 自適應夾爪
myCobot自適應夾爪,適用于多款消費級機型產品,使用串口通訊控制,可以自動適應夾持物體的寬度,也可以控制夾爪開合的大小,提供多種編程語言控制接口。

python編程語言控制方式
from pymycobot.mycobot import Mycobot
mc = Mycobot('com3',115200)
#夾爪靈位校準
mc.set_gripper_calibration()
# 夾爪的打開和關閉
0 is close,1 is open;int speed : 1~100
mc.set_gripper_state(0/1,speed)
# 夾爪開合大小的控制
int degree:0~100;int speed : 1~100
mc.set_gripper_value(degree,speed)
Example:
mc.set_gripper_value(100,80)
time.sleep(1)
mc.set_gripper_value(50,80)
主要適用于以下場景:
待抓取物體在寬度在25~45mm之間
克重不能超過150g(機械臂最大的末端負載250g)
物體的材質盡量得足夠堅硬,避免變形。
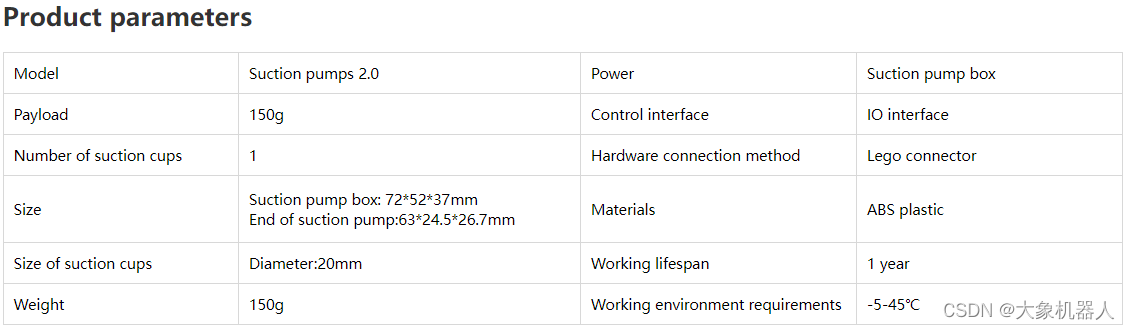
myCobot 垂直吸泵V2.0
myCobot垂直吸泵通過大氣壓的原理(真空吸附原理),當吸盤附著于物體表面,將吸盤內部的空氣抽走,形成一個壓力差就可以將物體牢牢吸住,當壓力差越大吸附力就越強。提供標準3.3V IO控 制,可廣泛搭載于各種嵌入式設備開發使用。

python編程語言的方式
from pymycobot.mycobot import Mycobot
mc = Mycobot('com3',115200)
#control Suction pump
IO port is the location where the suction pump is connected to the IO interface of the robot arm
state : 0 is open; 1 is close
mc.set_basic_output(IO port,state)
Example
#open the suction pump
mc.set_basic_output(5,0)
time.sleep(5)
# close the suction pump
mc.set_basic_output(5,1)
主要適用于以下物體:
物體的表面必須得是光滑的一個平面,凹凸不平的平面無法形成大氣壓強差的原理。
不建議吸取體積較大的物體,體積較大的物體會在機械臂運動的時候不一定能夠保持穩定。
物體的重量不超過150g
接下來介紹另一款吸泵.
Double head suction pump
擁有兩個吸泵吸頭,由CNC金屬件與光敏樹脂構成,可以吸附體積較大的物體,雙頭吸泵的工作原理也跟垂直吸泵的工作原理一樣,是制造大氣壓強差。提供標準3.3V IO控 制,可廣泛搭載于各種嵌入式設備開發使用。

雙頭吸泵的控制方式和垂直吸泵的控制方式一樣。
python編程語言的方式
from pymycobot.mycobot import Mycobot
mc = Mycobot('com3',115200)
#control Suction pump
IO port is the location where the suction pump is connected to the IO interface of the robot arm
state : 0 is open; 1 is close
mc.set_basic_output(IO port,state)
Example
#open the suction pump
mc.set_basic_output(5,0)
time.sleep(5)
# close the suction pump
mc.set_basic_output(5,1)
主要適用于一下物體:
物體的表面必須得是光滑的一個平面,凹凸不平的平面無法形成大氣壓強差的原理。
物體克重不建議超過150g,機械臂末端的負載最大負荷是250g
適用于物體表面積較大的,因為雙頭吸泵的設計適合吸取較大的物體。
吸頭越多所造成的壓強差就越大,所以它能夠吸附的更穩定
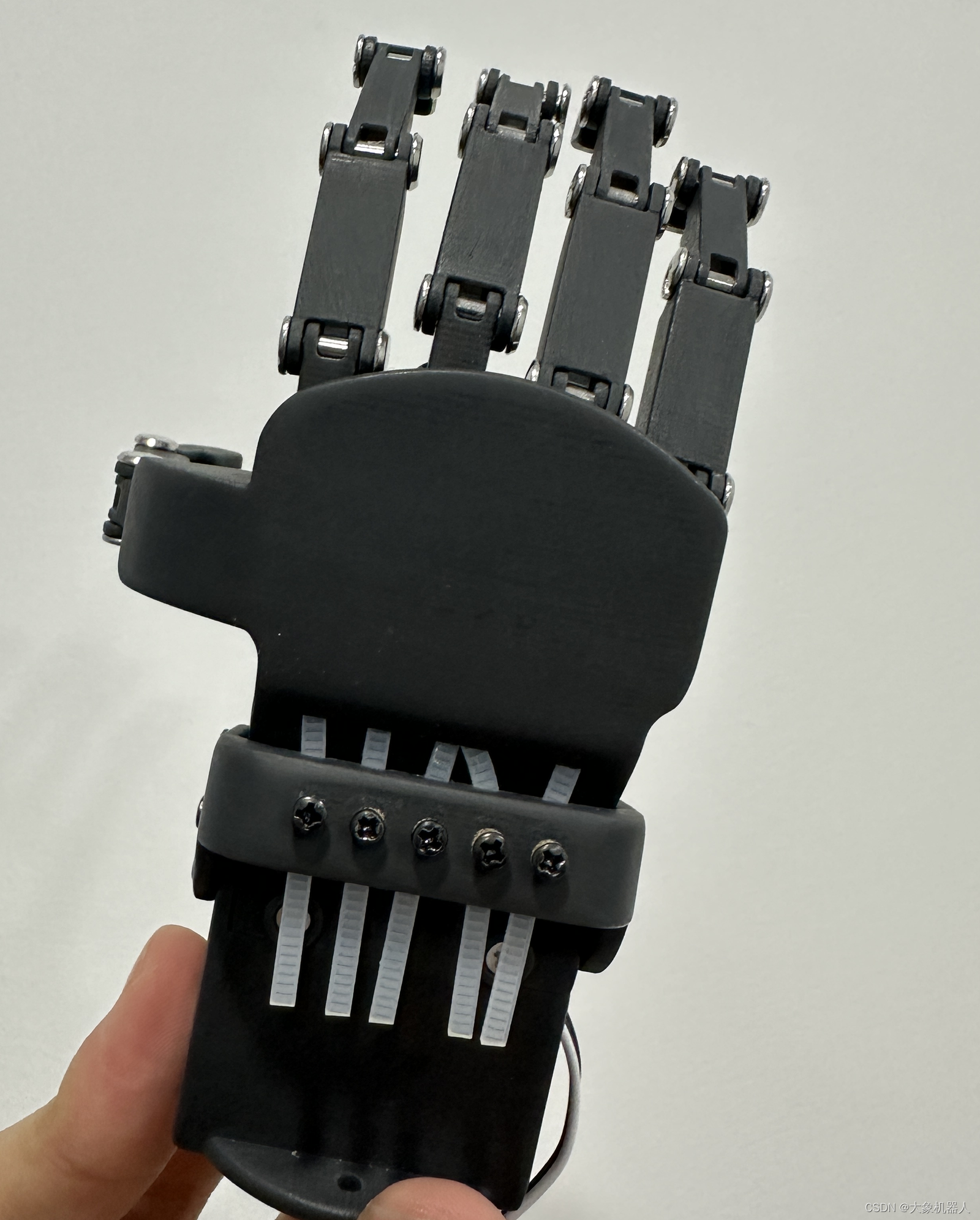
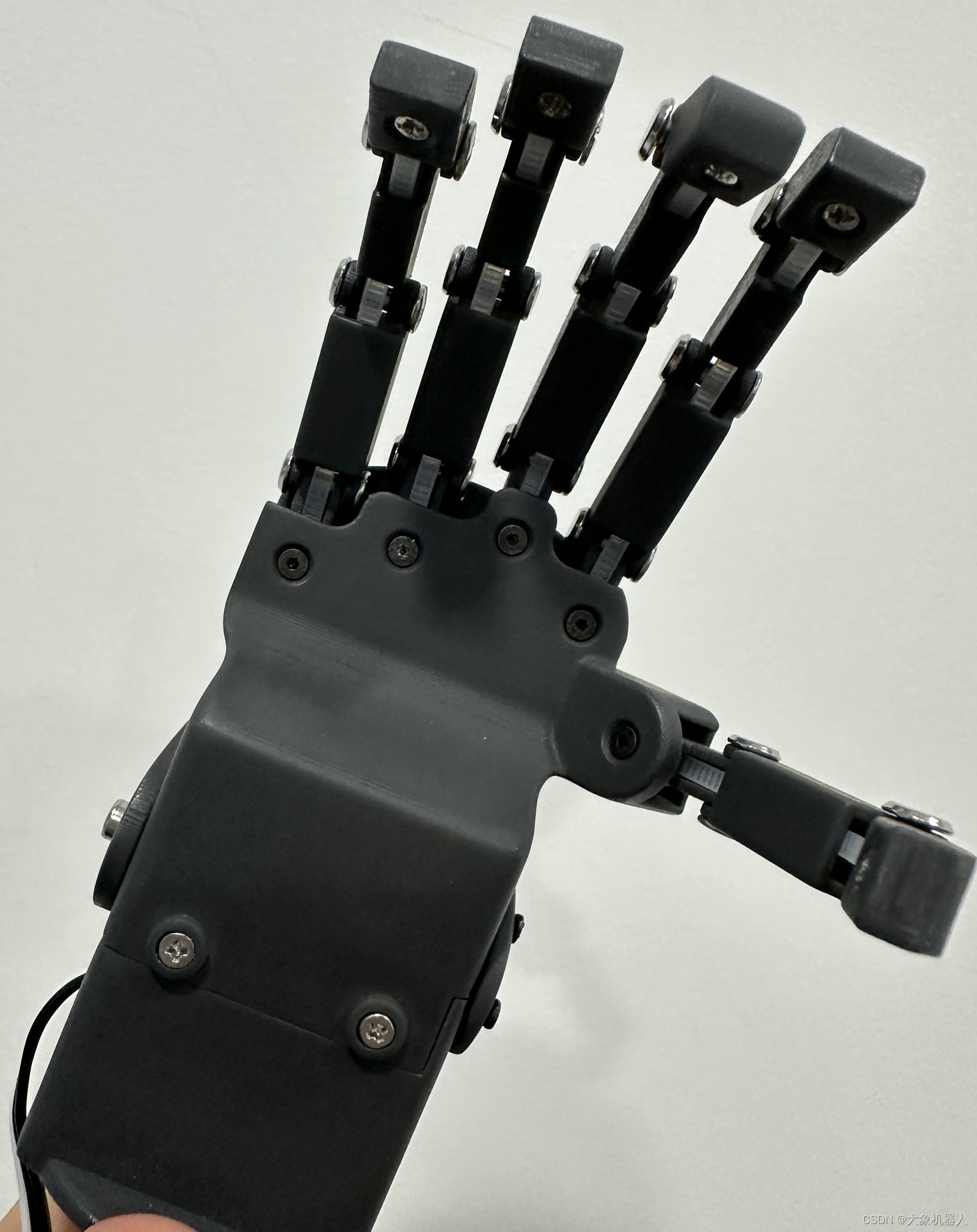
Dexterous hand
Dexterous hand是一款新的末端執行器是模仿人類的手掌進行仿生,來實現物體的抓取,拿放等功能,主要是通過IO控制,電力控制的方式。目前這款末端執行器還在開發當中本次文中算是初步給它露個面給大家看。
主要適用于以下場景:
該靈巧手主要是對一些不規則物體的抓放。
抓取的物體的重量需要控制在100g以內。
物體的寬度控制在25mm-45mm之間。
Summary
在這篇文章中,我向大家介紹了四款出色的機械臂末端執行器。通過深入探索每一款執行器的功能和特點,我們可以看到它們在不同的應用領域中的獨特優勢。你在選擇機械臂末端執行器的時候需要思考使用怎樣的末端執行器能夠滿足場景的需求,做一些簡單的搬運,還是想做一些酷炫的動作。
如果你們還有想要了解的末端執行器歡迎在文章的下方評論留言。你的評論和點贊是對我們最大的支持!我們下次再見
審核編輯 黃宇
-
人工智能
+關注
關注
1817文章
50094瀏覽量
265297 -
開源
+關注
關注
3文章
4203瀏覽量
46128 -
執行器
+關注
關注
5文章
434瀏覽量
20548 -
機械臂
+關注
關注
14文章
596瀏覽量
26120 -
大象機器人
+關注
關注
0文章
86瀏覽量
376
發布評論請先 登錄
汽車級多功能門執行器驅動器L99DZ80EP深度解析
DRV2603:線性諧振執行器的自動共振檢測觸覺驅動器的綜合解析
音圈執行器解鎖高端制造新可能
磁性執行器選型指南:矩形與圓柱形全解析
傳感器和執行器之間有什么關系?
直線旋轉執行器 vs 傳統執行器:優勢差異究竟在哪里??
速程精密:以直線旋轉執行器技術,驅動未來工廠夢想
極海G32R501工業六軸機械臂參考方案釋放工業4.0產業價值

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品

CCLINKIE轉PROFINET:讓執行器“絲滑”入網!
家人們快沖!Profibus六路集線器讓執行器集體開啟“躺贏模式”
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品

大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機

家里亂成“垃圾場”,樹莓派也能一鍵搞定家務了?




 工商網監
工商網監
評論