") SLAM激光導(dǎo)航搭配末端3D視覺相機(jī)定位, 1+1>2
SLAM激光導(dǎo)航搭配末端3D視覺相機(jī)定位, 1+1>2

當(dāng)我們談?wù)撊找鏌衢T的工業(yè)4.0、智能制造這些話題時(shí),機(jī)器人是一個(gè)無論如何也繞不開的問題。機(jī)器人的智能化程度影響著整個(gè)工業(yè)演化的進(jìn)程,傳統(tǒng)的機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,在部分行業(yè)實(shí)際應(yīng)用中,無法突破環(huán)境局限,使得末端定位精準(zhǔn)度無法達(dá)到預(yù)期要求,這極大地限制了機(jī)器人的應(yīng)用與發(fā)展。
此次尋跡智行在給客戶的解決方案中將SLAM激光導(dǎo)航系統(tǒng)與3D視覺相機(jī)末端定位結(jié)合,解決了實(shí)際應(yīng)用中貨品存放取精度要求高、環(huán)境復(fù)雜的難題。
客戶需求:
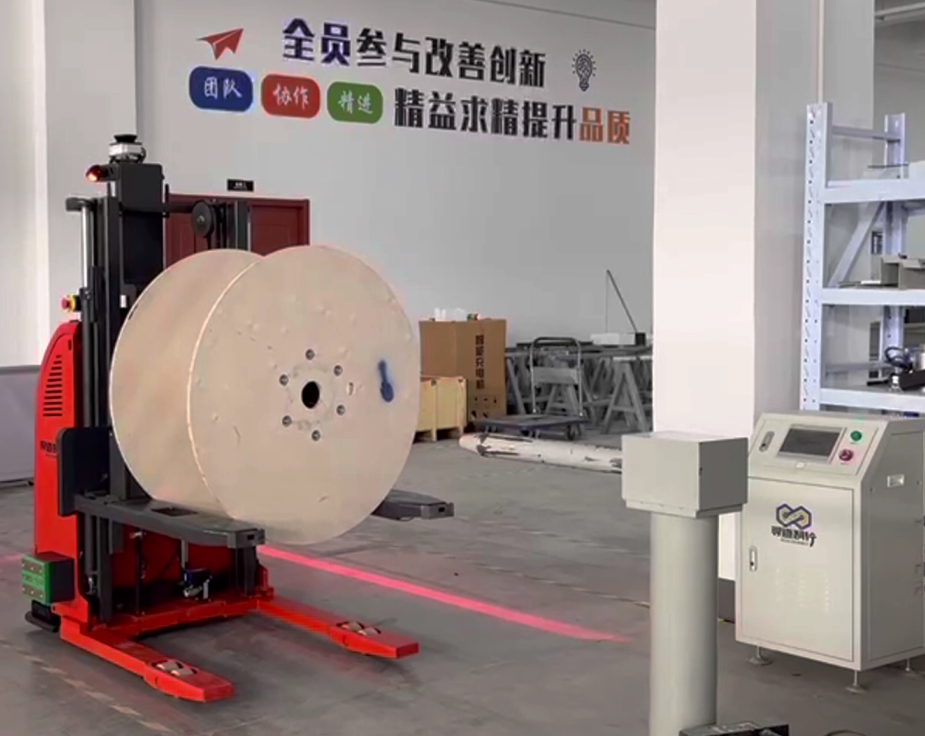
1、線纜盤放置架對(duì)接線纜盤取放
2、末端精準(zhǔn)度正負(fù)5mm
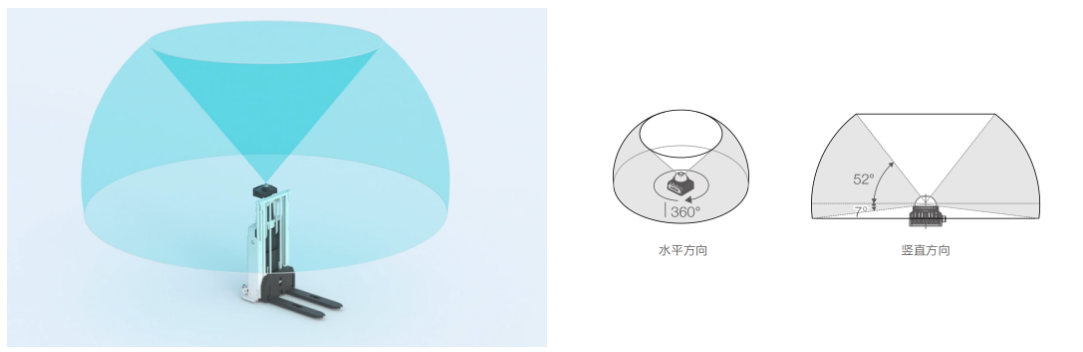
3、角度偏離自動(dòng)清除誤差,精準(zhǔn)對(duì)接
解決方案:
1、L12C車體+定制化超寬貨叉
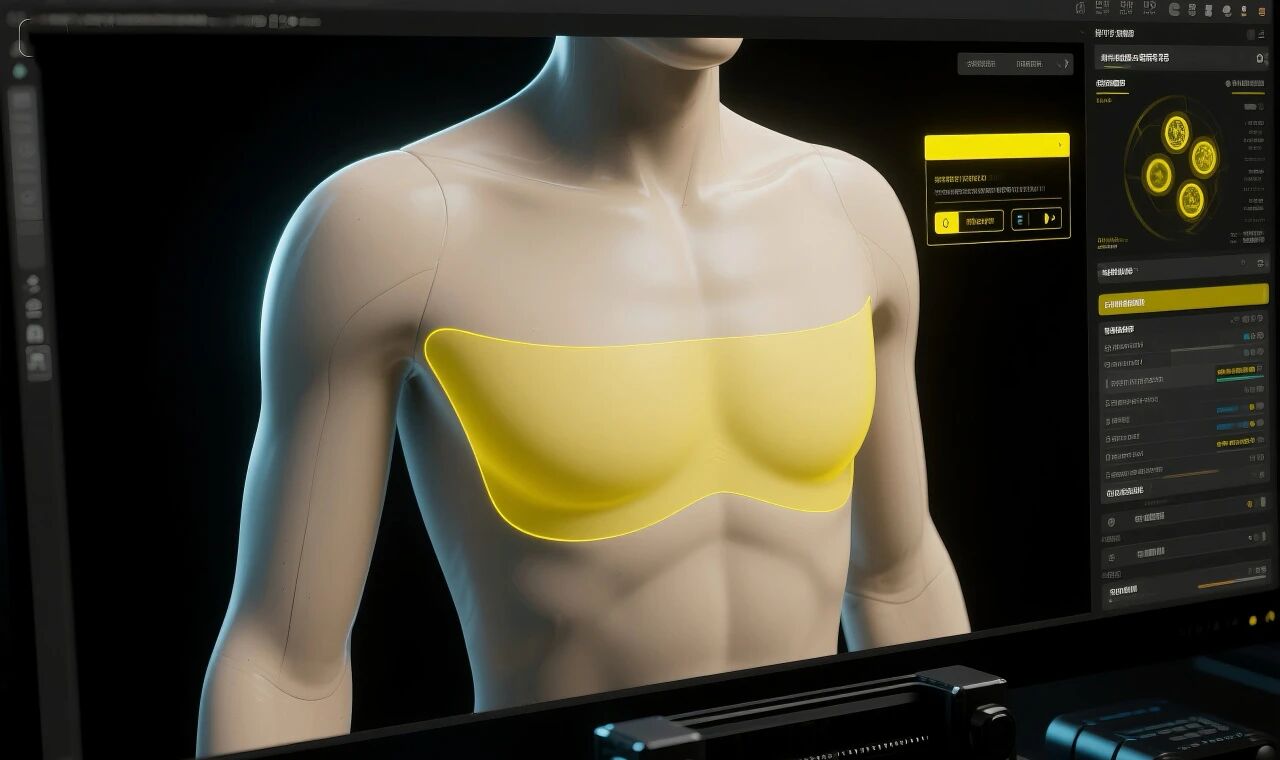
2、SLAM激光導(dǎo)航運(yùn)動(dòng)系統(tǒng)+3D視覺相機(jī)末端定位
3、RMS自研調(diào)度系統(tǒng)
客戶效益:
1、解決了線纜放置架與線纜盤對(duì)接口直徑過小,人工對(duì)接難度大的問題
2、保障生產(chǎn)安全,杜絕滿載搬運(yùn)的安全風(fēng)險(xiǎn)
3、生產(chǎn)節(jié)拍準(zhǔn)點(diǎn)率提高60%,大大提高生產(chǎn)效率
4、人工放置偏離,通過此方案3D視覺相機(jī)掃圖自動(dòng)校準(zhǔn),清除誤差,保障搬運(yùn)的精準(zhǔn)度
尋跡智行機(jī)器人以技術(shù)為驅(qū)動(dòng),不斷提升自研核心硬件&算法,引領(lǐng)百業(yè)應(yīng)對(duì)多種復(fù)雜場(chǎng)景,幫助工廠實(shí)現(xiàn)從倉儲(chǔ)物流到生產(chǎn)物流各環(huán)節(jié)物料的高效周轉(zhuǎn),為企業(yè)降本增效。
截至目前,眾多行業(yè)巨擘基于尋跡機(jī)器人在智能物流場(chǎng)景、方案和技術(shù)上的創(chuàng)新成績(jī),選擇與尋跡智行機(jī)器人展開深度合作,共同推進(jìn)智能物流不斷發(fā)展,譜寫搬運(yùn)機(jī)器人應(yīng)用新明天~
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31098瀏覽量
222384 -
激光
+關(guān)注
關(guān)注
21文章
3660瀏覽量
69657 -
3D
+關(guān)注
關(guān)注
9文章
3012瀏覽量
115099 -
SLAM
+關(guān)注
關(guān)注
24文章
457瀏覽量
33337 -
AGV
+關(guān)注
關(guān)注
28文章
1554瀏覽量
43684
發(fā)布評(píng)論請(qǐng)先 登錄
iDS iToF Nion 3D相機(jī),開啟高性價(jià)比3D視覺新紀(jì)元!

2025 3D機(jī)器視覺的發(fā)展趨勢(shì)

什么是激光雷達(dá) 3D SLAM技術(shù)?

從3D傳感器到立體相機(jī),解鎖工業(yè)應(yīng)用新可能

友思特應(yīng)用 | 基于高精度雙目散斑 3D 相機(jī)的放射治療視覺定位應(yīng)用
【CIE全國(guó)RISC-V創(chuàng)新應(yīng)用大賽】+基于MUSE Pi Pro的3d激光里程計(jì)實(shí)現(xiàn)
全新輕量級(jí)ViSTA-SLAM系統(tǒng)介紹

季豐電子邀您相約2025國(guó)際3D視覺感知與應(yīng)用大會(huì)
iTOF技術(shù),多樣化的3D視覺應(yīng)用
奧比中光發(fā)布最新一代3D激光雷達(dá)及雙目深度相機(jī)
如何提高3D成像設(shè)備的部署和設(shè)計(jì)優(yōu)勢(shì)

解析尋跡智行3D SLAM無人叉車的"智慧"從何而來?(本文純干貨)
光子精密雙目3D線激光輪廓測(cè)量?jī)x,擺脫視覺盲區(qū),1臺(tái)更比2臺(tái)強(qiáng)!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論