") 從概念到生產(chǎn)的自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案
從概念到生產(chǎn)的自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案

來(lái)源:雅名特自動(dòng)駕駛 虹科方案| 從概念到生產(chǎn)的自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案
自動(dòng)駕駛軟件在環(huán)( SiL )測(cè)試解決方案
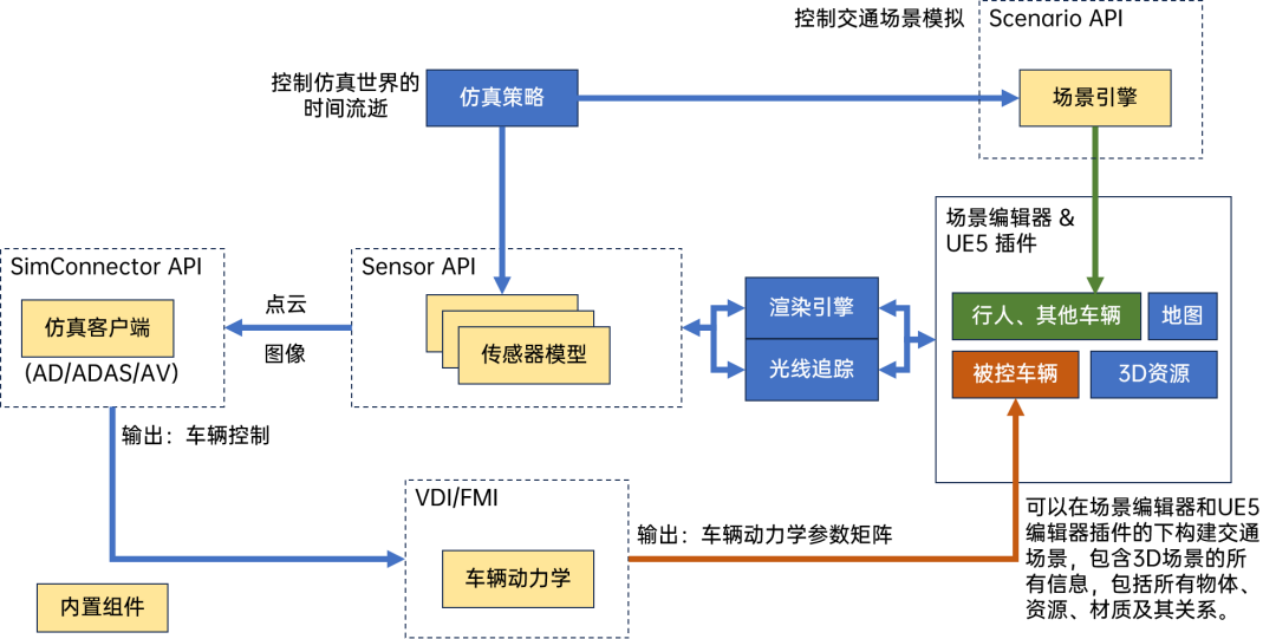
自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案能夠研究和驗(yàn)證高歷程實(shí)驗(yàn)和惡劣駕駛環(huán)境下的AD系統(tǒng)的性能,支持云端和PC端操作, 提供高保真度的仿真環(huán)境和傳感器模型,實(shí)現(xiàn)測(cè)試可重復(fù)和靈活擴(kuò)展測(cè)試場(chǎng)景 ,顯著降低AD系統(tǒng)開(kāi)發(fā)成本。
仿真策略
定義仿真客戶端如何運(yùn)行,影響仿真中時(shí)間的流逝,提供固定時(shí)間步長(zhǎng)和實(shí)時(shí)兩種方式。
- 對(duì)車(chē)輛發(fā)出控制命令,評(píng)估收到命令后的車(chē)輛反應(yīng)和環(huán)境中的要素變化
- 評(píng)估仿真世界的信息更新: 計(jì)算車(chē)輛位置;控制其他元素的位置
- 傳感器捕捉仿真世界更新的信息
- 傳感器將信息發(fā)送至內(nèi)置組件
內(nèi)置組件
將 AD/ADAS/AV 軟件集成到虹科aiSim自動(dòng)駕駛仿真模擬工具中,通過(guò) TCP/IP 通信實(shí)現(xiàn)客戶端-服務(wù)器關(guān)系。
Scenario API
aiSim 仿真模擬工具提供的場(chǎng)景編輯器能夠在安全的虛擬環(huán)境中驗(yàn)證 ADAS/AD 系統(tǒng)的功能,根據(jù)不同的測(cè)試案例調(diào)整條件,還可以提供API給客戶開(kāi)發(fā)和使用第三方應(yīng)用程序控制場(chǎng)景中的元素,包括車(chē)輛、行人和其他障礙物等。 aiSim-Unreal Editor 預(yù)配置插件支持場(chǎng)景定制內(nèi)容開(kāi)發(fā),內(nèi)置多種資源 :
· 地圖編輯
· 資源創(chuàng)建、導(dǎo)入和編輯
· 行人模型和動(dòng)畫(huà)
· 豐富車(chē)輛模型
車(chē)輛動(dòng)力學(xué)
aiSim 仿真模擬工具內(nèi)置車(chē)輛動(dòng)力學(xué)模型,同時(shí)提供車(chē)輛動(dòng)力學(xué)API和功能模型單元。 車(chē)輛動(dòng)力學(xué)模型基于廣泛的車(chē)輛動(dòng)力學(xué)參數(shù) :
· OEM
· 現(xiàn)有參數(shù)計(jì)算
· 工程文獻(xiàn)
傳感器仿真
傳感器仿真對(duì)于實(shí)現(xiàn)自動(dòng)駕駛端到端的測(cè)試至關(guān)重要,aiSim 引擎在測(cè)試過(guò)程中 提供高保真的傳感器模型,能夠生成全面的仿真條件并實(shí)現(xiàn)環(huán)境交互 。
如您對(duì)軟件在環(huán)測(cè)試解決方案感興趣,
歡迎聯(lián)系我們了解更多信息。
期待與您的交流!
審核編輯:湯梓紅
-
軟件
+關(guān)注
關(guān)注
69文章
5332瀏覽量
91577 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
793文章
14879瀏覽量
179791
發(fā)布評(píng)論請(qǐng)先 登錄
Elektrobit與Mobileye合作打造自動(dòng)駕駛解決方案
aiSim領(lǐng)銜!國(guó)內(nèi)外自動(dòng)駕駛仿真軟件大全:熱門(mén)推薦與選擇指南
自動(dòng)駕駛BEV Camera數(shù)據(jù)采集系統(tǒng):高精度時(shí)間同步解決方案

自動(dòng)駕駛仿真測(cè)試有什么具體要求?

邊聊安全 | 以L3級(jí)自動(dòng)駕駛為例,詳解DDT、DDT Fallback、MRC、MRM概念

汽車(chē)軟件安全測(cè)試中的痛點(diǎn)與Bugspot解決方案
自動(dòng)駕駛中常提的硬件在環(huán)是個(gè)啥?
小馬智行三城開(kāi)啟全天候自動(dòng)駕駛測(cè)試
低速自動(dòng)駕駛與乘用車(chē)自動(dòng)駕駛在技術(shù)要求上有何不同?

卡車(chē)、礦車(chē)的自動(dòng)駕駛和乘用車(chē)的自動(dòng)駕駛在技術(shù)要求上有何不同?

自動(dòng)駕駛技術(shù)測(cè)試有哪些?

搭建完整的ADAS測(cè)試鏈路,推動(dòng)自動(dòng)駕駛技術(shù)的安全發(fā)展



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論