") Eureka!NVIDIA 研究突破為機(jī)器人學(xué)習(xí)注入新動(dòng)力
Eureka!NVIDIA 研究突破為機(jī)器人學(xué)習(xí)注入新動(dòng)力

AI 智能體利用 LLM 自動(dòng)生成獎(jiǎng)勵(lì)算法,訓(xùn)練機(jī)器人完成復(fù)雜任務(wù)。
NVIDIA Research 開發(fā)的一款名為 Eureka 的新型 AI 智能體可以教機(jī)器人復(fù)雜的技能,它教會(huì)了機(jī)器人手快速轉(zhuǎn)筆,并且第一次轉(zhuǎn)得像人類一樣好。
上面視頻中所展示的令人驚嘆的“魔術(shù)”是機(jī)器人通過(guò) Eureka 學(xué)會(huì)熟練完成的近 30 項(xiàng)任務(wù)之一,Eureka 可以自動(dòng)編寫?yīng)剟?lì)算法來(lái)訓(xùn)練機(jī)器人。
Eureka 還教會(huì)了機(jī)器人完成打開抽屜和柜子、拋接球、操作剪刀等任務(wù)。
于 10 月 20 日發(fā)布的這一 Eureka 研究包含一篇論文和該項(xiàng)目的 AI 算法,開發(fā)者可以使用 NVIDIA Isaac Gym(一款用于強(qiáng)化學(xué)習(xí)研究的物理模擬參考應(yīng)用)進(jìn)行實(shí)驗(yàn)。Isaac Gym 基于 NVIDIA Omniverse 而構(gòu)建,后者是一個(gè)用于基于 OpenUSD 框架構(gòu)建 3D 工具和應(yīng)用的開發(fā)平臺(tái)。Eureka 自身是由 GPT-4 大型語(yǔ)言模型驅(qū)動(dòng)的。
NVIDIA AI 研究高級(jí)總監(jiān)、Eureka 論文作者之一的 Anima Anandkumar 表示:“在過(guò)去十年,強(qiáng)化學(xué)習(xí)取得了空前成功,但依然面臨許多挑戰(zhàn),比如獎(jiǎng)勵(lì)設(shè)計(jì)需要不斷試錯(cuò)才能完成。Eureka 是朝著開發(fā)將生成式和強(qiáng)化學(xué)習(xí)方法結(jié)合以解決這些艱巨的任務(wù)的新算法邁出的第一步。”
點(diǎn)擊視頻,觀看 Eureka 用 LLM 訓(xùn)練機(jī)器人靈巧操作
AI訓(xùn)練機(jī)器人
據(jù)該論文介紹,Eureka 生成的獎(jiǎng)勵(lì)程序(可讓機(jī)器人進(jìn)行試錯(cuò)學(xué)習(xí))在超過(guò) 80% 的任務(wù)上優(yōu)于人類專家編寫的程序,這使得機(jī)器人的平均性能提高了 50% 以上。
Eureka 教機(jī)械臂打開一個(gè)抽屜。
該 AI 智能體使用 GPT-4 LLM 和生成式 AI 編寫軟件代碼,為機(jī)器人進(jìn)行強(qiáng)化學(xué)習(xí)提供獎(jiǎng)勵(lì)。它不需要任何特定任務(wù)提示或預(yù)定義的獎(jiǎng)勵(lì)模板,并且能夠隨時(shí)結(jié)合人類的反饋改進(jìn)其獎(jiǎng)勵(lì),使結(jié)果更加精準(zhǔn)地符合開發(fā)者的愿望。
利用 Isaac Gym 中的 GPU 加速模擬,Eureka 能夠快速評(píng)估大批獎(jiǎng)勵(lì)候選者的質(zhì)量,從而提高訓(xùn)練效率。
Eureka 隨后會(huì)基于訓(xùn)練結(jié)果匯總關(guān)鍵統(tǒng)計(jì)數(shù)據(jù),并指導(dǎo) LLM 改進(jìn)其獎(jiǎng)勵(lì)函數(shù)的生成。通過(guò)這種方式,AI 可以自我完善。Eureka 教會(huì)了各類機(jī)器人,包括四足機(jī)器人、雙足機(jī)器人、四旋翼機(jī)器人、靈巧手、協(xié)作機(jī)器人臂等,來(lái)完成不同類型的任務(wù)。
該研究論文對(duì) 20 個(gè) Eureka 訓(xùn)練任務(wù)進(jìn)行了深入評(píng)估,這些任務(wù)基于開源的靈巧性基準(zhǔn),要求機(jī)器人手展示一系列復(fù)雜的雙手任務(wù)。
這些來(lái)自九個(gè) Isaac Gym 環(huán)境的測(cè)試結(jié)果通過(guò)使用 NVIDIA Omniverse 生成的可視化進(jìn)行了展示。
類人型機(jī)器人通過(guò) Eureka 學(xué)習(xí)跑步步態(tài)。
該項(xiàng)目的貢獻(xiàn)者之一、NVIDIA 高級(jí)研究科學(xué)家 Linxi “Jim” Fan 表示:“Eureka 是一個(gè)獨(dú)特的組合,將大型語(yǔ)言模型與 NVIDIA GPU 加速的模擬技術(shù)相結(jié)合,可以實(shí)現(xiàn)靈巧的機(jī)器人控制,并且為藝術(shù)家提供了一種制作物理逼真動(dòng)畫的新方法。”
除了 NVIDIA Research 最近取得的進(jìn)展(比如使用 GPT-4 構(gòu)建的能夠自主玩 《我的世界》的 AI 智能體 Voyager)之外,這項(xiàng)突破性的研究成果也必將讓開發(fā)者們腦洞大開。
NVIDIA Research 由全球數(shù)百名科學(xué)家和工程師組成,團(tuán)隊(duì)專注于 AI、計(jì)算機(jī)圖形學(xué)、計(jì)算機(jī)視覺(jué)、自動(dòng)駕駛汽車、機(jī)器人學(xué)等領(lǐng)域的研究。
了解 Eureka 與 NVIDIA Research 的更多信息,請(qǐng)查看:
-
Eureka:
https://eureka-research.github.io/
-
NVIDIA Research:
https://www.nvidia.com/en-us/research/
GTC 2024 將于 2024 年 3 月 18 至 21 日在美國(guó)加州圣何塞會(huì)議中心舉行,線上大會(huì)也將同期開放。點(diǎn)擊“閱讀原文”或掃描下方海報(bào)二維碼,關(guān)注更多會(huì)議及活動(dòng)信息。
原文標(biāo)題:Eureka!NVIDIA 研究突破為機(jī)器人學(xué)習(xí)注入新動(dòng)力
文章出處:【微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
英偉達(dá)
+關(guān)注
關(guān)注
23文章
4087瀏覽量
99192
原文標(biāo)題:Eureka!NVIDIA 研究突破為機(jī)器人學(xué)習(xí)注入新動(dòng)力
文章出處:【微信號(hào):NVIDIA_China,微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
NVIDIA神經(jīng)網(wǎng)絡(luò)創(chuàng)新研究重塑機(jī)器人學(xué)習(xí)

NVIDIA Isaac Lab 2.3新增功能助力簡(jiǎn)化機(jī)器人學(xué)習(xí)
NVIDIA開源物理引擎與OpenUSD加速機(jī)器人學(xué)習(xí)
NVIDIA 發(fā)布三大利器,推動(dòng)人形機(jī)器人邁向新紀(jì)元
NVIDIA Isaac Lab多GPU多節(jié)點(diǎn)訓(xùn)練指南

NVIDIA展示機(jī)器人領(lǐng)域的研究成果
NVIDIA Isaac Lab可用環(huán)境與強(qiáng)化學(xué)習(xí)腳本使用指南

通過(guò)NVIDIA Cosmos模型增強(qiáng)機(jī)器人學(xué)習(xí)

NVIDIA Isaac Sim和Isaac Lab現(xiàn)已推出早期開發(fā)者預(yù)覽版
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
NVIDIA 通過(guò)云端至機(jī)器人計(jì)算平臺(tái)驅(qū)動(dòng)人形機(jī)器人技術(shù),賦能物理 AI

盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
構(gòu)建人形機(jī)器人學(xué)習(xí)的合成運(yùn)動(dòng)生成流程

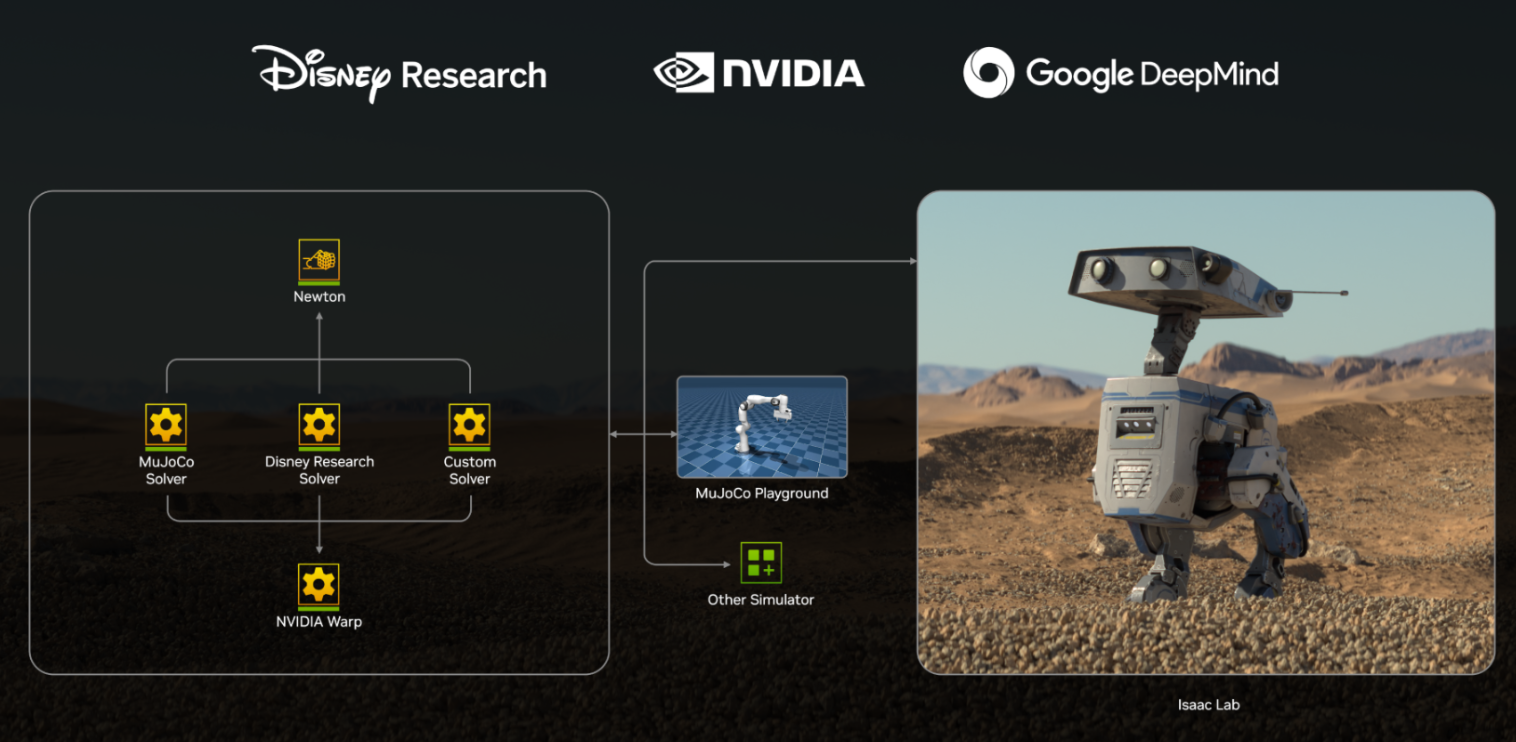
深度解讀英偉達(dá)Newton機(jī)器人平臺(tái):技術(shù)革新與跨界生態(tài)構(gòu)建
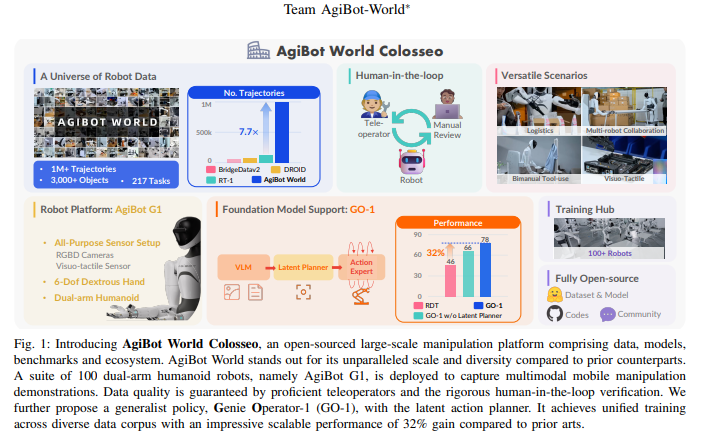
AgiBot World Colosseo:構(gòu)建通用機(jī)器人智能的規(guī)模化數(shù)據(jù)平臺(tái)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論