 在線研討會 | 基于 LLM 構建中文場景檢索式對話機器人:Llama2 + NeMo
在線研討會 | 基于 LLM 構建中文場景檢索式對話機器人:Llama2 + NeMo

Llama2 的出現掀起了開源大模型的熱潮,相比于前身 Llama1,Llama2 的訓練數據多了 40%,經過了 2 萬億個標記的訓練,上下文長度也翻倍,token 從 2,048 增加到 4,096,并對算法細節進行了優化,加速了推理速度,讓 Llama2 的性能有了很大的提升,能夠和 ChatGPT 相媲美。
Llama2 大模型旨在處理廣泛的語言任務,包括文本生成、機器翻譯、問題回答、代碼生成等等。該模型經過大規模的訓練,能夠理解并生成文本,為各種應用提供強大的自然語言處理能力。它的多語言能力和通用性也使其成為處理中文場景任務的理想選擇之一。
NVIDIA NeMo Toolkit是一個用于構建先進的對話式 AI 模型的工具包,它內置集成了自動語音識別 (ASR)、自然語言處理 (NLP) 和語音合成 (TTS) 的模型及方法,方便調用先進的預訓練模型快速完成對話式 AI 中各類子任務。
本次在線研討會主要面向對人工智能感興趣的開發者,講解如何結合使用 NeMo 與 Llama2 大模型,快速構建中文場景下的檢索式對話機器人。
通過本次在線研討會您可以了解到:
- Llama2大語言模型介紹;
- Llamaindex工具庫的使用;
- NVIDIA NeMo Toolkit 介紹;
- 代碼實踐:NeMo 結合 Llama2 構建中文檢索式對話機器人。
- 時間-
2023/10/17 20:00-21:30
-本期技術專家-

李奕澎(Yipeng)
NVIDIA 企業開發者社區經理
擁有多年數據分析建模、人工智能自然語言處理開發經驗。在自動語音識別、自然語言處理、語音合成等對話式 AI 技術領域有豐富的實戰經驗與見解。曾開發法律、金融、保險文檔中基于實體抽取的智能問答系統,曾開發基于 NLP 知識抽取,KG 知識圖譜的建立的科研文檔智能檢索系統。
- 參與方式-
微信識別二維碼/點擊 “閱讀原文”
【注冊參加本次研討會】



掃碼加入直播答疑群
如有任何問題請添加小助手微信
"NVChina02"備注 1017入群
點擊“閱讀原文”,報名本次在線研討會!
原文標題:在線研討會 | 基于 LLM 構建中文場景檢索式對話機器人:Llama2 + NeMo
文章出處:【微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
-
英偉達
+關注
關注
23文章
4086瀏覽量
99168
原文標題:在線研討會 | 基于 LLM 構建中文場景檢索式對話機器人:Llama2 + NeMo
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
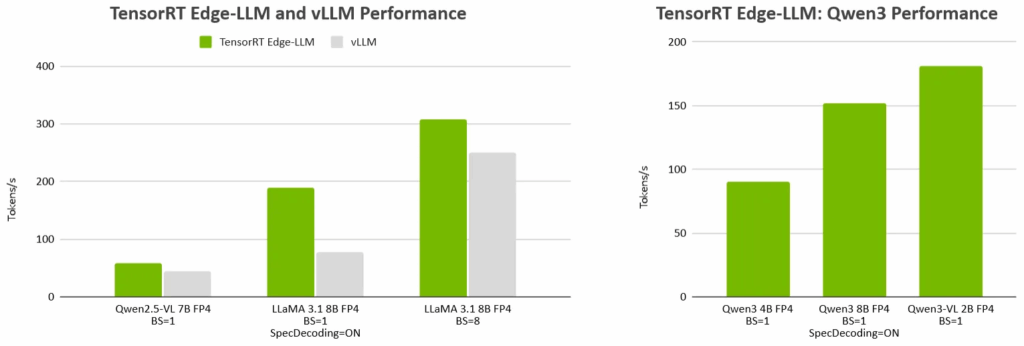
NVIDIA TensorRT Edge-LLM在汽車與機器人行業的落地應用
AI機器人方案_ai人機對話機器人PCBA硬件定制開發

德州儀器人形機器人技術線上研討會精彩回顧
活動預告|雅特力與您相約2025電機控制先進技術研討會

格靈深瞳出席光大金融研究院人形機器人產融協同研討會
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
會議回顧丨虹科汽車×AI×機器人技術研討會圓滿落幕!

全國首屆人形機器人線纜技術研討會圓滿召開!
明遠智睿SSD2351開發板:語音機器人領域的變革力量
【杭州】RT-Thread工業以太網應用技術研討會 | 知行工坊




 工商網監
工商網監
評論