") 如何實(shí)現(xiàn)RTOS上的微秒級(jí)延時(shí)設(shè)計(jì)呢?
如何實(shí)現(xiàn)RTOS上的微秒級(jí)延時(shí)設(shè)計(jì)呢?

通常RTOS系統(tǒng)滴答為1KHz,當(dāng)然,也有100Hz,或者10KHz的情況。
1KHz時(shí),系統(tǒng)延時(shí)最短為1ms,在實(shí)時(shí)控制中有些情況需要微秒(us)級(jí)延時(shí),這該怎么辦呢?
微秒級(jí)延時(shí)有兩種實(shí)現(xiàn)思路:
一、著情提高系統(tǒng)時(shí)鐘
一、著情提高系統(tǒng)時(shí)鐘
之所以說(shuō)是“著情”提高的原因是:系統(tǒng)時(shí)鐘越快,單位時(shí)間內(nèi)的線程調(diào)度次數(shù)越多,也就是說(shuō)花在調(diào)度的時(shí)間會(huì)大幅增加,這對(duì)線程的功能不利。真正做事的是線程函數(shù),如果 CPU 會(huì)說(shuō)話,過(guò)快的線程調(diào)度將會(huì)引起 CPU 的極度不滿。線程是 CPU 具體要做的事,剛把 CPU 調(diào)過(guò)來(lái)做事,事沒(méi)做完就拉跑做另一件事,CPU 會(huì)說(shuō):“傻瓜,瘋了嗎?不是讓我做事的碼,干嘛老是拉著我跑這跑那,就不能讓我干完了再走碼?!”
二、使用 MCU 片上外設(shè)定時(shí)器
一般 MCU 都會(huì)有片上高精度定時(shí)器外設(shè),可以配置到 1us 精度。即然用定時(shí)器可以,那就用定時(shí)器唄,還寫(xiě)什么文章?當(dāng)然不只是開(kāi)啟定時(shí)器這么簡(jiǎn)單,RTOS 要實(shí)現(xiàn)的是阻塞延時(shí),任務(wù)進(jìn)入延時(shí)要交出 CPU 使用權(quán)進(jìn)入阻塞狀態(tài)。在 RTOS 上用定時(shí)器躺平死等是無(wú)賴行為,睡眠讓權(quán)才能實(shí)現(xiàn)良好的多線程調(diào)度。
雖然 us 級(jí)延時(shí)時(shí)間短,在一個(gè)線程處于延時(shí)中時(shí)另一個(gè)線程又要開(kāi)始延時(shí)的情況發(fā)生概率不大。但是在多線程情況下延時(shí)依舊有可能發(fā)生重入,比如一個(gè)線程要延時(shí) 500us,剛過(guò) 100us 另一個(gè)線程就要延時(shí) 200us,這種情況不但發(fā)生了重入,還有“時(shí)間覆蓋”(200us 覆蓋了上一個(gè)線程剩余的 400us 里的時(shí)間段),這些情況也不是光靠一個(gè)硬件高精度定時(shí)器就能應(yīng)對(duì)的。
多線程延時(shí)工況分析
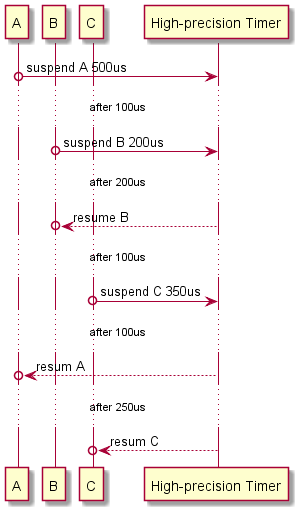
先來(lái)看一張多線程延時(shí)工況圖,如圖所示:
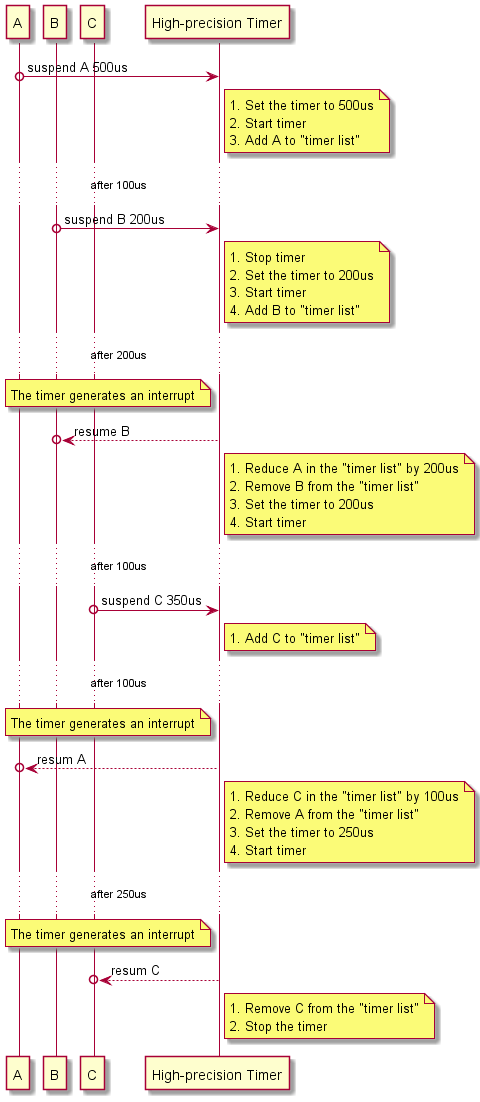
為了方便閱讀以及接下來(lái)進(jìn)一步的設(shè)計(jì)實(shí)現(xiàn),在上圖基礎(chǔ)上加了一些注釋,對(duì)多線程的工況進(jìn)行更細(xì)致一點(diǎn)的描述,如圖所示:
為了更好說(shuō)明,這里選用 Microsoft Azure RTOS ThreadX 做基礎(chǔ)來(lái)實(shí)現(xiàn)這個(gè)設(shè)計(jì)。目的在于輸出通用方法,具體選什么 RTOS 并不重要,是個(gè)多線程就行,比如:RT-Thread、FreeRTOS 等都可以。
圖中的 A、B、C 和 High-precision Timer 是 4 個(gè)線程。其中 High-precision Timer 線程優(yōu)先級(jí)最高,但不是定時(shí)回調(diào)的,而是被動(dòng)觸發(fā)。下面說(shuō)說(shuō)為什么 High-precision Timer 線程優(yōu)先級(jí)要最高,以及如何被動(dòng)觸發(fā)。
我們知道線程中用 WAIT_FOREVER 方式等待信號(hào)量的時(shí)候,若信號(hào)量的值為 0 則線程會(huì)被掛起在這個(gè)信號(hào)量下。我們就利用這個(gè)特點(diǎn)來(lái)完成線程的“被動(dòng)觸發(fā)”,即:
1、信號(hào)量建立時(shí)初值為 0
2、在中斷中釋放一次信號(hào)量(即信號(hào)量值加 1)
這樣中斷發(fā)生后就能立刻喚醒掛起在該信號(hào)量下的線程,即完成了線程的被動(dòng)觸發(fā)。線程轉(zhuǎn)為就緒態(tài)后,因其優(yōu)先級(jí)最高,會(huì)立即搶占調(diào)度器得到執(zhí)行。在 Hight-precision Timer 線程被信號(hào)量喚醒后,立即對(duì)延時(shí)時(shí)間到的線程進(jìn)行 resume 操作,這樣就完成了線程的 us 延時(shí)。
我們回看一下上面圖中的 A、B、C 三個(gè)線程,每條線上都串了兩個(gè)圈圈,每條線從上往下第一個(gè)圈是延時(shí)主動(dòng)掛起,第二個(gè)圈是時(shí)間到后被 High-precision Timer 線程 resume 回來(lái)繼續(xù)執(zhí)行。
至此讀圖的方法基本說(shuō)清楚了,如果要落實(shí)到代碼,其實(shí)還有個(gè)“硬件定時(shí)器與 High-precision Timer 線程”的關(guān)系。圖中標(biāo)在 High-precision Timer 左邊的標(biāo)簽是說(shuō):因?yàn)橛布〞r(shí)器產(chǎn)生了中斷,才使得 High-precision Timer 線程對(duì)延時(shí)時(shí)間到的線程進(jìn)行 resume。上面說(shuō)“被動(dòng)觸發(fā)”的時(shí)候有說(shuō)到相關(guān)原理,其實(shí)上面圖的最右邊應(yīng)該再放一列表示“硬件定時(shí)器”就更好理解原理了。沒(méi)有放的原因是這里要考慮“可重入”,這個(gè)瓜有點(diǎn)多,一車裝不下,裝少了說(shuō)不完善,裝多了眼花繚亂,所以就沒(méi)畫(huà)“硬件定時(shí)器”這一列。
代碼實(shí)現(xiàn)
為了實(shí)現(xiàn)上述設(shè)計(jì)的阻塞延時(shí),代碼要?jiǎng)澐譃樗膫€(gè)部分: 一、 要配置一個(gè) us 級(jí)定時(shí)器; 二、 要做一個(gè) us 延時(shí)的函數(shù)接口; 三、 要有一個(gè) High-precision Timer 線程; 四、 要有一個(gè)測(cè)試用 us 級(jí)的普通定時(shí)回調(diào)線程。 下面以 STM32 為例逐一上代碼。
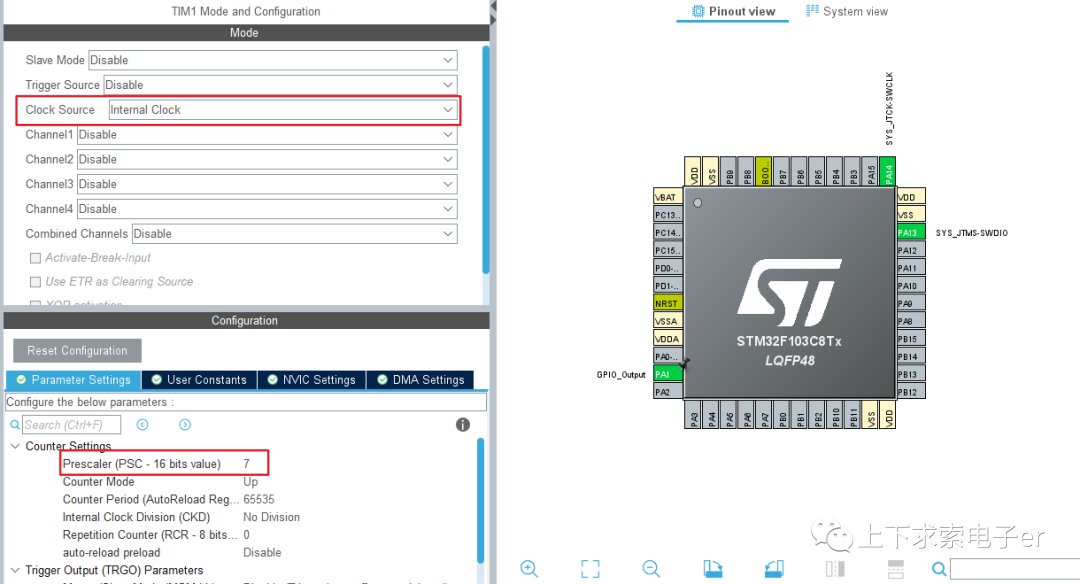
us 級(jí)定時(shí)器配置
1、 定時(shí)器初始化
這里直接使用 CubeMX 生成的函數(shù)最方便,一行不改,如下:
/** * @brief TIM9 Initialization Function * @param None * @retval None */ static void MX_TIM9_Init(void) { /* USER CODE BEGIN TIM9_Init 0 */ /* USER CODE END TIM9_Init 0 */ TIM_ClockConfigTypeDef sClockSourceConfig = {0}; /* USER CODE BEGIN TIM9_Init 1 */ /* USER CODE END TIM9_Init 1 */ htim9.Instance = TIM9; htim9.Init.Prescaler = 215; htim9.Init.CounterMode = TIM_COUNTERMODE_UP; htim9.Init.Period = 65535; htim9.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim9.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim9) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim9, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN TIM9_Init 2 */ /* USER CODE END TIM9_Init 2 */ }
由于我們要使用定時(shí)器的定時(shí)中斷,所以要對(duì) NVIC 設(shè)置一下,這部分代碼 CubeMX 生成在另一個(gè)文件下,為了調(diào)用方便將之與上面的初始化函數(shù)合至一處,如下:
void bsp_InitHardTimer(void)
{
__HAL_RCC_TIM9_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM1_BRK_TIM9_IRQn);
MX_TIM9_Init();
}
注意,這里調(diào)到初始化函數(shù)就完了,不要開(kāi)啟定時(shí)器,按照設(shè)計(jì)定時(shí)器是需要延時(shí)的線程在調(diào)用延時(shí)函數(shù)時(shí)才打開(kāi)的。
2、 打開(kāi)定時(shí)器的函數(shù)
void bsp_DelayUS(uint32_t n)
{
n = (n<=30) ? n : (n-30);
HAL_TIM_Base_Stop_IT(&htim9);
htim9.Instance->CNT = htim9.Init.Period - n;
HAL_TIM_Base_Start_IT(&htim9);
}
這里注意是“先關(guān)閉再打開(kāi)”,上面提到了“時(shí)間覆蓋”的情況下做延時(shí),就必須先關(guān)閉正在延時(shí)中的定時(shí)器。
3、 定時(shí)器中斷函數(shù)
/**
* @brief This function handles TIM1 break interrupt and TIM9 global interrupt.
*/
void TIM1_BRK_TIM9_IRQHandler(void)
{
/* USER CODE BEGIN TIM1_BRK_TIM9_IRQn 0 */
/* USER CODE END TIM1_BRK_TIM9_IRQn 0 */
HAL_TIM_IRQHandler(&htim9);
/* USER CODE BEGIN TIM1_BRK_TIM9_IRQn 1 */
tx_semaphore_put(&tx_semaphore_delay_us);
HAL_TIM_Base_Stop_IT(&htim9);
/* USER CODE END TIM1_BRK_TIM9_IRQn 1 */
}
這里調(diào)用了 Microsoft Azure RTOS ThreadX 釋放信號(hào)量的 API tx_semaphore_put(),信號(hào)量在初始化時(shí)建立(省略了建立信號(hào)量的代碼)。
us 延時(shí)的函數(shù)接口
TX_THREAD *thread_delay_us;
UINT tx_thread_sleep_us(ULONG timer_ticks)
{
TX_THREAD_GET_CURRENT(thread_delay_us)
bsp_DelayUS(timer_ticks);
tx_thread_suspend(thread_delay_us);
return TX_SUCCESS;
}
這里定義了一個(gè)全局變量 thread_delay_us,用 TX_THREAD_GET_CURRENT() 獲取調(diào)用 us 延時(shí)的線程,在打開(kāi)定時(shí)器后將線程通過(guò) tx_thread_suspend() 掛起。
High-precision Timer 線程
extern TX_THREAD* thread_delay_us;
UINT status;
void threadx_task_delay_us_run(ULONG thread_input)
{
(void)thread_input;
while(1){
tx_semaphore_get(&tx_semaphore_delay_us, TX_WAIT_FOREVER);
if(thread_delay_us){
status = tx_thread_resume(thread_delay_us);
}
}
}
這里同樣省略了線程的建立過(guò)程,給出了線程主體:與信號(hào)量 tx_semaphore_delay_us 一起完成線程的被動(dòng)觸發(fā),以及對(duì) thread_delay_us 線程的 resume。
測(cè)試用 us 級(jí)的普通定時(shí)回調(diào)線程
#include "pthread.h"
VOID *pthread_test_entry(VOID *pthread1_input)
{
while(1)
{
//print_task_information();
uint64_t now = get_timestamp_us();
tx_thread_sleep_us(100);
printf("delay_us: %lld
", get_timestamp_us() - now);
}
}
這是以 posix 接口 API 建立的線程,對(duì) posix 有興趣的可以看下文章《Azure RTOS ThreadX 的 posix 接口》。
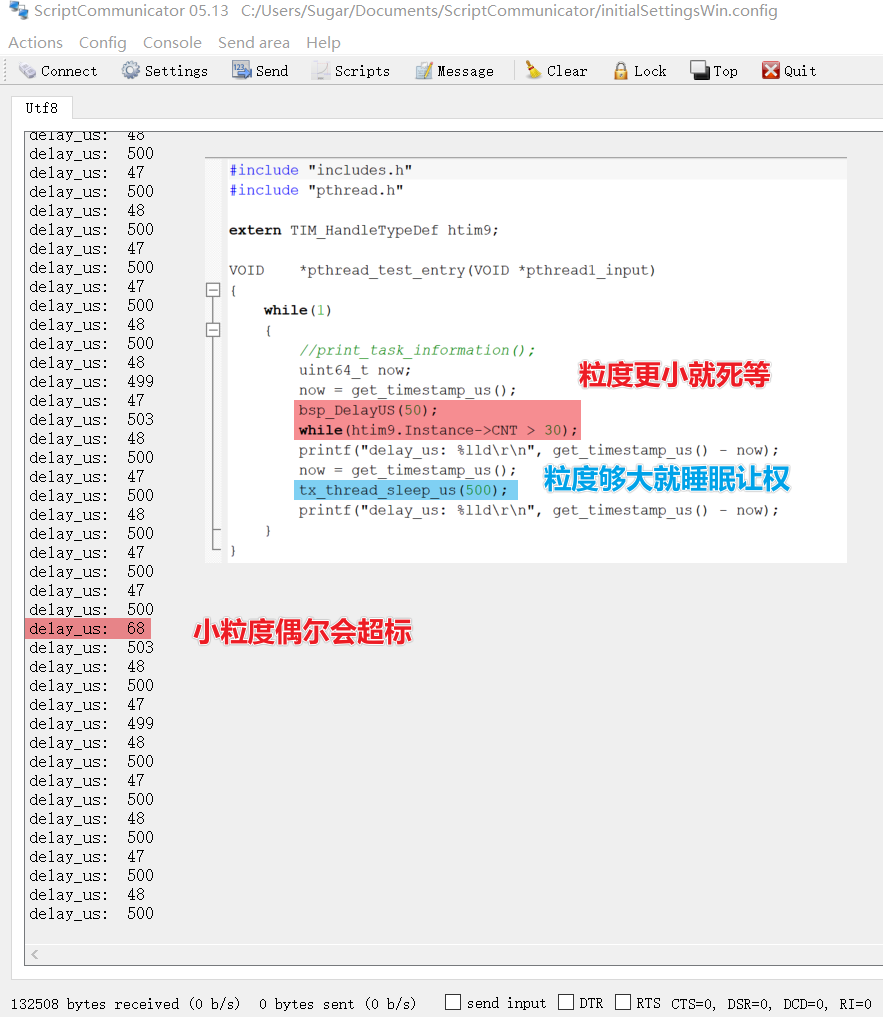
時(shí)間粒度測(cè)試
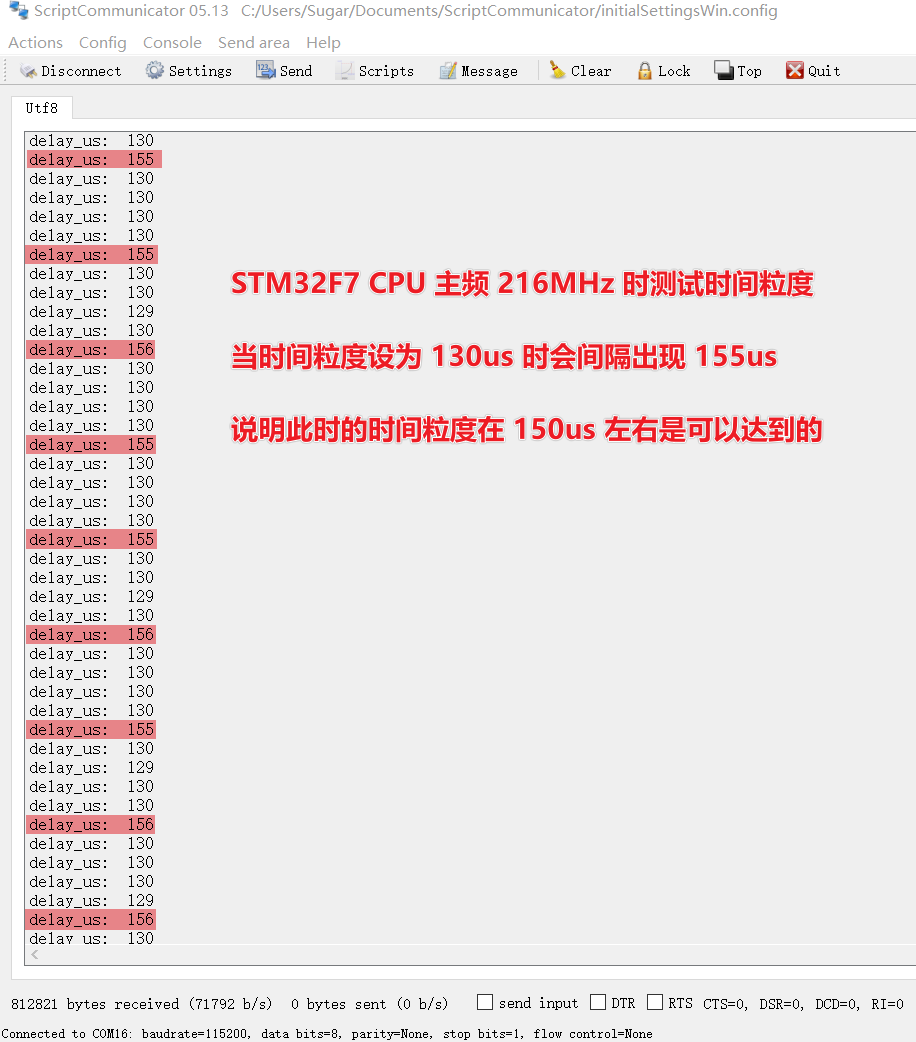
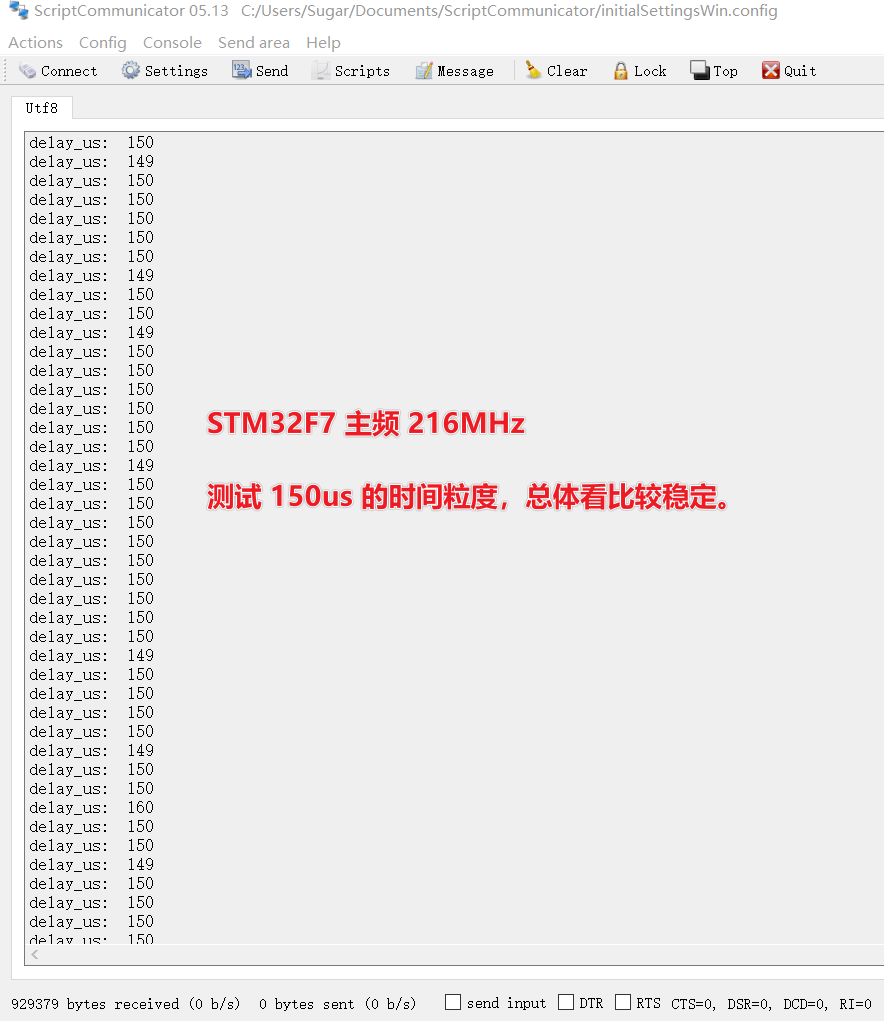
ThreadX 據(jù)說(shuō)可以在 200MHz 的 MCU 上達(dá)到亞微秒級(jí)的上下文切換,Sugar 測(cè)試的時(shí)間粒度在 150us 時(shí)比較穩(wěn)定。這并不是說(shuō) ThreadX 性能不好,而是 STM32F7 定時(shí)器一開(kāi)加一關(guān)大約就要 30us,所以定時(shí)精度比 30us 更小時(shí)不要開(kāi)關(guān)定時(shí)器,但這次我們的設(shè)計(jì)為了應(yīng)對(duì)可能發(fā)生的重入情況,必須有定時(shí)器的開(kāi)關(guān)才行。
怎么知道一開(kāi)加一關(guān)要 30us 的,原因如圖:
審核編輯:劉清
-
STM32
+關(guān)注
關(guān)注
2309文章
11162瀏覽量
373414 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3368瀏覽量
123593 -
觸發(fā)器
+關(guān)注
關(guān)注
14文章
2056瀏覽量
63397 -
RTOS
+關(guān)注
關(guān)注
25文章
866瀏覽量
122976 -
定時(shí)器中斷
+關(guān)注
關(guān)注
0文章
49瀏覽量
11755
原文標(biāo)題:RTOS 上微秒級(jí)延時(shí)方案
文章出處:【微信號(hào):strongerHuang,微信公眾號(hào):strongerHuang】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何在Zephyr RTOS中實(shí)現(xiàn)延時(shí)和計(jì)時(shí)函數(shù)

STM32基于HAL庫(kù)實(shí)現(xiàn)微秒延時(shí)
【STM32L476 Nucleo試用體驗(yàn)】SysTick微秒級(jí)延時(shí)函數(shù)的實(shí)現(xiàn)
請(qǐng)問(wèn)怎么在ucosII中實(shí)現(xiàn)微秒級(jí)的延時(shí)?
如何用SysTick系統(tǒng)定時(shí)器寫(xiě)一個(gè)微秒級(jí)延時(shí)函數(shù)呢
如何利用SysTick實(shí)現(xiàn)微秒延時(shí)函數(shù)?
怎么實(shí)現(xiàn)STM32CubeIDE HAL庫(kù)微秒us的延時(shí)Delay?
HAL庫(kù)微秒級(jí)的延時(shí)實(shí)現(xiàn)
用C語(yǔ)言實(shí)現(xiàn),精確微秒級(jí)的延時(shí)資料下載

單片機(jī) 毫秒&微秒 級(jí)延時(shí)
通用定時(shí)器實(shí)現(xiàn)STM32單片機(jī)微秒級(jí)延時(shí)函數(shù)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論