") NVIDIA Jetson 月度項(xiàng)目:能瞄準(zhǔn)、射門和得分的自主足球機(jī)器人
NVIDIA Jetson 月度項(xiàng)目:能瞄準(zhǔn)、射門和得分的自主足球機(jī)器人

足球被認(rèn)為是全世界最受歡迎的運(yùn)動(dòng)之一,這主要是因?yàn)樽闱虮荣愅旨ち遥軌蛘宫F(xiàn)球員們出色的體能與技術(shù),讓觀眾看得驚心動(dòng)魄。因此,自然會(huì)有人致力于向機(jī)器人傳授足球比賽的精髓,包括如何搶球、瞄準(zhǔn)球門、傳球和進(jìn)球得分等。
事實(shí)上,的確有一項(xiàng)專為這個(gè)想法而開展的賽事。RoboCup 小型機(jī)器人聯(lián)賽 (Small Size League, SSL)之視覺封鎖技術(shù)挑戰(zhàn)賽,就在鼓勵(lì)參賽團(tuán)隊(duì)“探索本地傳感和處理方法,而非采用常見的板外計(jì)算機(jī)和全局?jǐn)z像頭感知環(huán)境的方法”。來自巴西累西腓伯南布哥聯(lián)邦大學(xué)的學(xué)生 Jo?o Guilherme、其指導(dǎo)老師 Edna Barros 和其他 SSL 隊(duì)友共同制造了一個(gè)由 NVIDIA Jetson Nano 開發(fā)者套件驅(qū)動(dòng)的全向移動(dòng)機(jī)器人,該機(jī)器人可以自主執(zhí)行足球任務(wù)。
該團(tuán)隊(duì)所制造的全向移動(dòng)機(jī)器人配有單目攝像頭,可自主執(zhí)行以下任務(wù):
-
定位
-
找球和搶球
-
坐標(biāo)計(jì)算
-
將球傳給其他機(jī)器人隊(duì)友
-
射空門得分
團(tuán)隊(duì)制造這臺(tái)機(jī)器人時(shí),使用了平均處理速度為 30 FPS 的 AI 軟件工作流,硬件功耗僅為 10.8 W 左右。
機(jī)器人前部有一個(gè)踢球裝置,是一個(gè)四輪全向移動(dòng)機(jī)器人。圖 1 為機(jī)器人的幾何形狀。
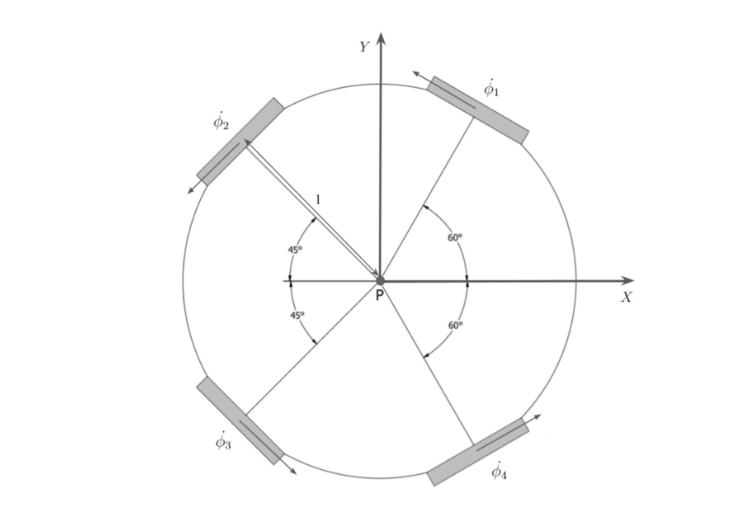
圖 1. 由 NVIDIA Jetson Nano 開發(fā)者套件驅(qū)動(dòng)的
全向移動(dòng)機(jī)器人的運(yùn)動(dòng)能力可以自主執(zhí)行足球任務(wù)
該團(tuán)隊(duì)在《制造 RoboCup 小型機(jī)器人聯(lián)賽自主機(jī)器人》一文中解釋道:“我們?cè)趽屒颉⑦M(jìn)球和傳球這三個(gè)足球任務(wù)上評(píng)估了系統(tǒng),成功率分別達(dá)到 80%、80% 和 46.7%。”
比賽期間,各隊(duì)將使用場(chǎng)外計(jì)算機(jī)執(zhí)行大部分計(jì)算,去接收球的位置并采集場(chǎng)地幾何信息和裁判指令。比賽隊(duì)伍分成 6 個(gè)機(jī)器人組 (B 組) 和 11 個(gè)機(jī)器人組(A 組),機(jī)器人通過帶寬最小的射頻通信接收導(dǎo)航指令。機(jī)器人的直徑和高度限制分別為 180 毫米(B 組)和 150 毫米(A 組),因此被稱為“小型機(jī)器人聯(lián)賽”。
RoboCup 小型機(jī)器人聯(lián)賽分為四個(gè)階段:
-
在賽場(chǎng)某處抓到一個(gè)靜止的球
-
將球射入空門得分
-
將機(jī)器人移動(dòng)到特定坐標(biāo)
-
間接射門得分(需要兩個(gè)機(jī)器人)
另外,該挑戰(zhàn)賽還要求機(jī)器人能夠檢測(cè)場(chǎng)地中的物體、估算物體的位置、計(jì)算導(dǎo)航路徑并記錄經(jīng)過的軌跡。
Guilherme 和他的隊(duì)友在《制造 RoboCup 小型機(jī)器人聯(lián)賽自主機(jī)器人》一文中表示:“SSL 比賽是一種機(jī)器人資源極其有限的高度動(dòng)態(tài)化環(huán)境,這就要求解決方案必須考慮尺寸、功耗、精度和處理速度之間的權(quán)衡。我們?cè)谘芯恐刑岢隽艘环N使這些機(jī)器人能夠自主執(zhí)行基本足球任務(wù)的架構(gòu),也就是說這些機(jī)器人不用接收任何的外部信息。”
項(xiàng)目硬件
該團(tuán)隊(duì)在項(xiàng)目中使用了以下硬件:
-
一套 Jetson Nano 開發(fā)者套件,用于執(zhí)行嵌入式視覺和制定決策
-
一個(gè)全向移動(dòng)機(jī)器人
-
一個(gè)羅技 C922 攝像頭,用于提供單目視覺
-
慣性傳感器,用于估算里程
-
一個(gè) STM32F767ZI 微控制器單元 (MCU),用于接收來自 Nano 的目標(biāo)相對(duì)位置和導(dǎo)航標(biāo)志,并使用慣性里程計(jì)執(zhí)行底層控制和軌跡估計(jì)
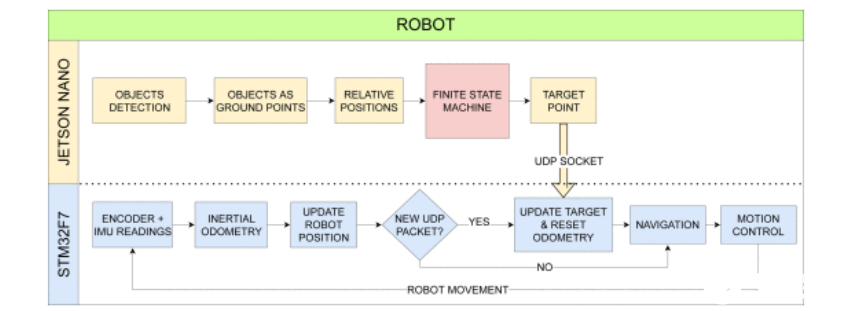
圖 2. 足球機(jī)器人的 AI 檢測(cè)流程和運(yùn)動(dòng)規(guī)劃
有關(guān)所使用硬件的更多信息,請(qǐng)參見 Rob?CIn 2020 團(tuán)隊(duì)說明文件:https://ssl.robocup.org/wp-content/uploads/2020/03/2020_TDP_RoboCIn.pdf
技術(shù)挑戰(zhàn)
在該賽事的視覺封鎖挑戰(zhàn)賽中,獲勝機(jī)器人必須能夠完成各種足球技能,包括抓住靜止的球、射空門得分、移動(dòng)到特定坐標(biāo)以及間接進(jìn)球得分(傳球給另一個(gè)機(jī)器人)等。
機(jī)器人必須能夠僅使用嵌入式傳感和處理技術(shù)來完成這些技能。這項(xiàng)挑戰(zhàn)沒有高度限制,因此團(tuán)隊(duì)在普通機(jī)器人的頂部添加了一個(gè)板載攝像頭、Jetson Nano 和一塊電源板。
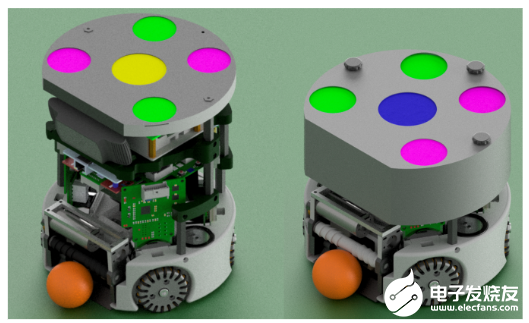
圖 3. 團(tuán)隊(duì)為視覺封鎖挑戰(zhàn)賽改裝的足球機(jī)器人(左)
和他們?cè)瓉淼臋C(jī)器人(右)
此外,這項(xiàng)挑戰(zhàn)還要求機(jī)器人能夠探測(cè)場(chǎng)地中的物體、估算其位置、計(jì)算導(dǎo)航路徑并記錄經(jīng)過的軌跡。SSL 足球比賽利用外部攝像頭和板外計(jì)算機(jī)感知環(huán)境,并向機(jī)器人發(fā)送指令。
研究人員表示,該 SSL 視覺架構(gòu)“存在一定的局限性,比如攝像頭的視野、色彩分割、軟件延遲和通信中斷等,這迫使團(tuán)隊(duì)開發(fā)出能夠應(yīng)對(duì)復(fù)雜條件的解決方案。例如,球遮擋是比賽中的一個(gè)常見問題,即機(jī)器人在攝像頭圖像上的投影與球重疊。還有就是球和機(jī)器人的位置會(huì)發(fā)生偏移,偶爾會(huì)出現(xiàn)檢測(cè)不到或檢測(cè)錯(cuò)誤的情況。”
在 SSL 比賽中,機(jī)器人和球的速度分別高達(dá) 3.7 m/s 和 6.5 m/s,這使得比賽的移動(dòng)速度非常快,因此需要高吞吐量的解決方案。此外,受尺寸限制,再加上使用電池作為電源,解決方案的功耗必須較低。在比賽過程中,機(jī)器人還要做出精準(zhǔn)的遠(yuǎn)射和長傳,因此需要能夠精確估算位置。
團(tuán)隊(duì)還注意到精確的電機(jī)控制的重要性,這樣機(jī)器人就可以在足球場(chǎng)上移動(dòng),并保持其測(cè)量位置的準(zhǔn)確性。他們需要一種方法,來降低機(jī)器人對(duì)位置的內(nèi)部理解與實(shí)際物理位置之間偏離的比率。
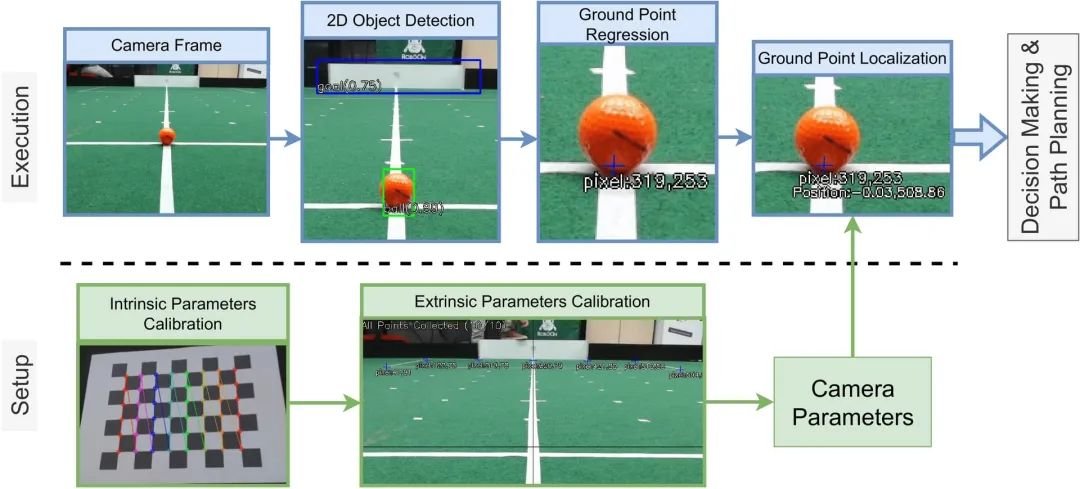
圖 4. 足球機(jī)器人的攝像頭可幫助檢測(cè)物體并提供視野,
以便機(jī)器人作出決策和規(guī)劃路徑
項(xiàng)目軟件和 AI
研究團(tuán)隊(duì)使用 OpenCV2 以及校準(zhǔn)和姿勢(shì)計(jì)算技術(shù)提取單目攝像頭(固定在機(jī)器人上)的 “內(nèi)在和外在參數(shù)”。他們使用 SSD MobileNet v2 檢測(cè)攝像頭幀畫面上的物體 2D 邊界框,還使用一個(gè)程序?qū)?SSD MobileNet 創(chuàng)建的邊界框坐標(biāo)執(zhí)行線性回歸,用于估算出預(yù)校準(zhǔn)攝像頭參數(shù)。這將在場(chǎng)地上分配對(duì)應(yīng)物體底部中心的點(diǎn)(代表物體與攝像頭的相對(duì)位置),包括對(duì)應(yīng)該機(jī)器人的點(diǎn)。
結(jié)果
團(tuán)隊(duì)對(duì)他們的機(jī)器人在今年挑戰(zhàn)賽中的表現(xiàn)非常滿意,主要包括:
-
抓取靜止的球:在 15 次嘗試中,機(jī)器人有 12 次能夠在球接觸到運(yùn)球器時(shí)將球停住,成功率高達(dá) 80%。
-
進(jìn)球:在 15 次跑動(dòng)中,有 12 次進(jìn)球。
-
傳球:在 15 次嘗試中,成功傳球 7 次,成功率為 46.7%。
團(tuán)隊(duì)自 2019 年起參加 RoboCup 小型機(jī)器人聯(lián)賽,并于 2022 年贏得首個(gè)世界冠軍(B 組)。他們目前還是三屆拉丁美洲冠軍。“RoboCup 2023 之 Rob?CIn 小型機(jī)器人聯(lián)賽團(tuán)隊(duì)介紹文件擴(kuò)增版”(https://arxiv.org/abs/2307.10018)介紹了該團(tuán)隊(duì)為獲得 7 月底在法國波爾多舉行的 RoboCup 2023 小型機(jī)器人聯(lián)賽 (SSL) B 組冠軍而對(duì)其項(xiàng)目作出的改進(jìn)。最終,他們?nèi)缭笂Z冠。


圖 5. 機(jī)器人抓取靜止的球(上)并射門得分(下)
未來的計(jì)劃
Guilherme 深入介紹了團(tuán)隊(duì)在比賽中遇到的挑戰(zhàn),以及可以在未來的賽事中作出的改進(jìn)。他指出,大多數(shù)失敗都是由于錯(cuò)誤檢測(cè)到場(chǎng)外物體造成的,“我們正在研究一種檢測(cè)賽場(chǎng)邊界,并使用掩碼來屏蔽這些物體的解決方案。”
該團(tuán)隊(duì)需要更加快速的物體檢測(cè)解決方案。Guilherme 表示:“盡管我們目前能夠執(zhí)行基本的技能,但 30 FPS 的處理速度對(duì)于 SSL 環(huán)境來說仍然很低。在主要比賽中,攝像頭的運(yùn)行速度通常為 70 FPS。”
該機(jī)器人完全是根據(jù)檢測(cè)到的物體的相對(duì)位置來執(zhí)行技能,也就是說,它并不知道自己在賽場(chǎng)上的位置。Guilherme 表示:“我們認(rèn)為這些信息可以幫助優(yōu)化在足球任務(wù)中的表現(xiàn),同時(shí)還能讓我們避免處罰,例如避免機(jī)器人進(jìn)入守門員區(qū)域等。我們正在研究一種基于蒙特卡洛定位 (MCL) 的自定位算法,并將在未來幾個(gè)月內(nèi)發(fā)布相關(guān)信息。”
該團(tuán)隊(duì)計(jì)劃在未來為該機(jī)器人的系統(tǒng)添加更多功能(如賽場(chǎng)線檢測(cè)、定位算法和路徑規(guī)劃等),他們將努力優(yōu)化系統(tǒng)的每個(gè)部分來滿足這些需求。
此外,該團(tuán)隊(duì)還在繼續(xù)研究檢測(cè)賽場(chǎng)邊界和賽場(chǎng)線,以及估算機(jī)器人自我位置的解決方案。他們還計(jì)劃用 Jetson Orin Nano 替換 Jetson Nano ,從而提高機(jī)器人的處理速度。這一升級(jí)將幫助提高團(tuán)隊(duì)在聯(lián)賽中的競(jìng)爭(zhēng)力。
請(qǐng)?jiān)L問開發(fā)者論壇和 GitHub,進(jìn)一步了解該團(tuán)隊(duì)的原始項(xiàng)目。
開發(fā)者論壇:https://forums.developer.nvidia.com/t/ssl-detector-objects-detection-and-position-estimation-at-the-robocup-small-size-league-ssl/221385
GitHub:https://github.com/jgocm/ssl-detector
您還可以探索 Jetson 社區(qū)項(xiàng)目,從其他機(jī)器人開發(fā)者那里獲得更多想法和靈感:https://developer.nvidia.com/embedded/community/jetson-projects
SIGGRAPH 2023
NVIDIA 精彩發(fā)布
SIGGRAPH 2023 | NVIDIA 主題演講重磅發(fā)布精彩回顧,探索 AI 無限未來!
敬請(qǐng)持續(xù)關(guān)注...
SIGGRAPH 2023 NVIDIA 主題演講中文字幕版已上線 !掃描下方海報(bào)二維碼,或點(diǎn)擊“閱讀原文”即可觀看,與 NVIDIA 創(chuàng)始人兼首席執(zhí)行官黃仁勛一起探索 AI 的未來!
原文標(biāo)題:NVIDIA Jetson 月度項(xiàng)目:能瞄準(zhǔn)、射門和得分的自主足球機(jī)器人
文章出處:【微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
英偉達(dá)
+關(guān)注
關(guān)注
23文章
4087瀏覽量
99186
原文標(biāo)題:NVIDIA Jetson 月度項(xiàng)目:能瞄準(zhǔn)、射門和得分的自主足球機(jī)器人
文章出處:【微信號(hào):NVIDIA_China,微信公眾號(hào):NVIDIA英偉達(dá)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于NVIDIA模組與軟件套件推動(dòng)邊緣與機(jī)器人AI推理
如何在NVIDIA Jetson平臺(tái)上運(yùn)行最新的開源AI模型

如何在NVIDIA Jetson Thor上提升機(jī)器人感知效率
NVIDIA Jetson系列開發(fā)者套件助力打造面向未來的智能機(jī)器人
強(qiáng)強(qiáng)合作 Arm與NVIDIA攜手驅(qū)動(dòng)智能汽車及機(jī)器人領(lǐng)域創(chuàng)新
ADI借助NVIDIA Jetson Thor平臺(tái)加速人形機(jī)器人研發(fā)進(jìn)程
NVIDIA Jetson Thor:開啟通用機(jī)器人新時(shí)代
NVIDIA Jetson Thor實(shí)現(xiàn)機(jī)器人實(shí)時(shí)推理能力的巨大飛躍
NVIDIA三臺(tái)計(jì)算機(jī)解決方案如何協(xié)同助力機(jī)器人技術(shù)
機(jī)器人競(jìng)技幕后:磁傳感器芯片激活 “精準(zhǔn)感知力”
基于 NVIDIA Blackwell 的 Jetson Thor 現(xiàn)已發(fā)售,加速通用機(jī)器人時(shí)代的到來
NVIDIA Jetson + Isaac SDK 人形機(jī)器人方案全面解析
NVIDIA Jetson + Isaac SDK 在人形機(jī)器人領(lǐng)域的方案詳解
NVIDIA 通過云端至機(jī)器人計(jì)算平臺(tái)驅(qū)動(dòng)人形機(jī)器人技術(shù),賦能物理 AI




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論