") KUKA機器人視覺抓取的工作原理
KUKA機器人視覺抓取的工作原理

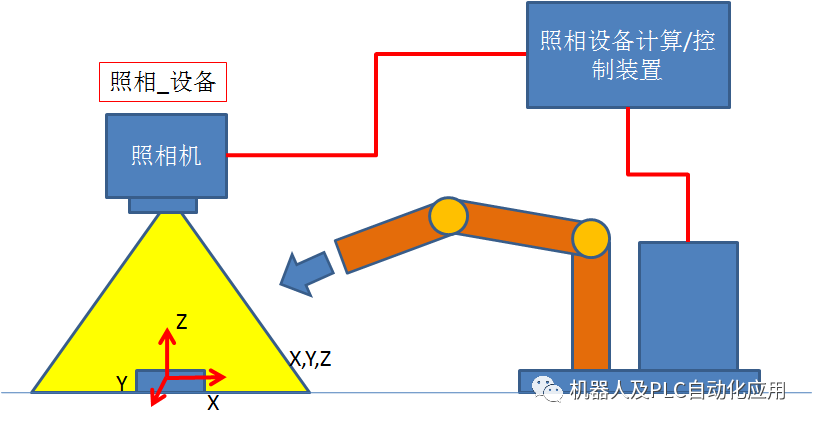
視覺抓取主要是通過改變機器人的TOOL坐標(biāo)系或BASE坐標(biāo)系來實現(xiàn)的.
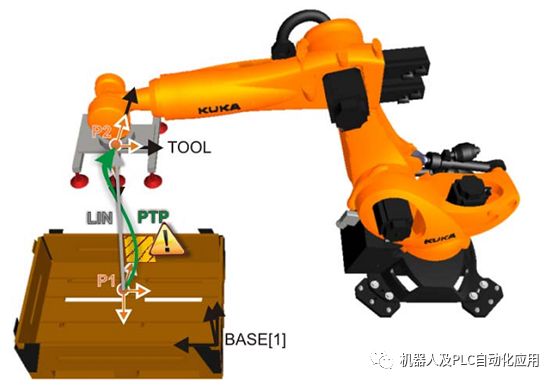
物體位置的變化主要是它位置的X,Y,Z 方向的變化.
BASE坐標(biāo)系:可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡單 。在用戶坐標(biāo)系中, TCP 點將沿用戶自定義的坐標(biāo)軸方向運動。
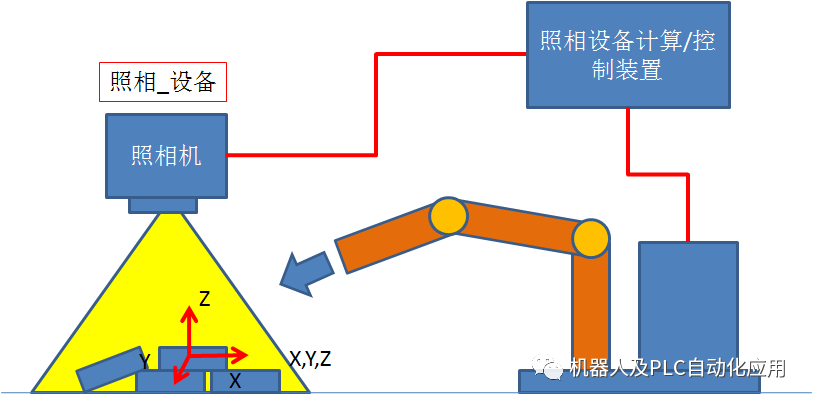
以改變BASE 坐標(biāo)系為例:
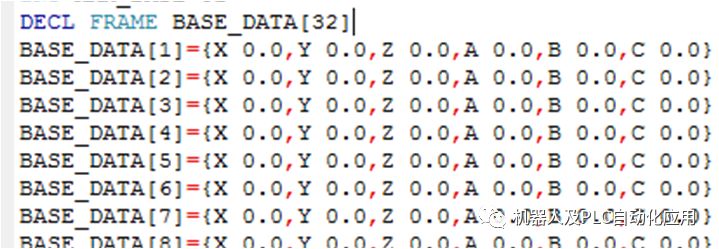
KUKAC4 現(xiàn)在可以使用32個BASE 坐標(biāo)系
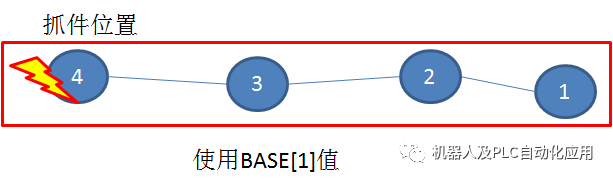
沒有使用視覺補償功能時,只用一個BASE坐標(biāo)系.
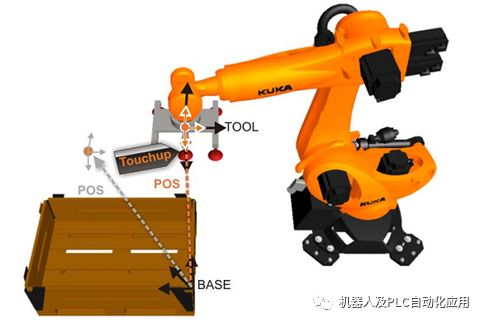
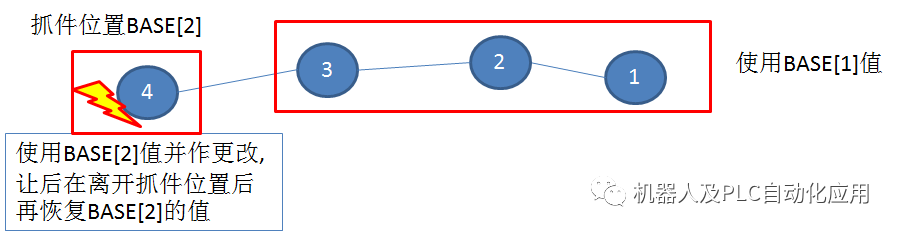
改變機器人BASE坐標(biāo)系值從而改變機器人抓件位置,使用多個坐標(biāo)系.
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222229 -
TCP
+關(guān)注
關(guān)注
8文章
1425瀏覽量
83506 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
17474
原文標(biāo)題:KUKA 機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
機器人視覺——機器人的“眼睛”
大量的編程時間,進(jìn)步生產(chǎn)效率和加工質(zhì)量。 我國視覺機器人應(yīng)用主要有以下目的:用以代替人類從事危險、有害和惡劣環(huán)境、超凈環(huán)境下的工作;把人從骯臟、繁重的勞動中解放出來;進(jìn)步勞動生產(chǎn)率,改
發(fā)表于 01-23 15:02
工業(yè)機器人的工作原理
現(xiàn)在廣泛應(yīng)用的焊接機器人都屬于第一代工業(yè)機器人,它的基本工作原理是示教再現(xiàn)。示教也稱導(dǎo)引,即由用戶導(dǎo)引機器人,一步步按實際任務(wù)操作一遍,機器人
發(fā)表于 12-15 10:25
KUKA機器人問題解答
1 開機坐標(biāo)系無效 世界坐標(biāo)系是以槍頭為基點,在這種坐標(biāo)系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標(biāo)系中移動,槍頭也隨著改變方向,那就是我們在
發(fā)表于 07-15 07:48
【MYD-CZU3EG開發(fā)板試用申請】基于機器視覺的工業(yè)機器人抓取工作站
項目名稱:基于機器視覺的工業(yè)機器人抓取工作站試用計劃:申請理由本人是嘉興技師學(xué)院教師,浙江機器人
發(fā)表于 09-18 14:18
【瑞芯微RK1808計算棒試用申請】基于機器視覺的工業(yè)機器人抓取工作站
項目名稱:基于機器視覺的工業(yè)機器人抓取工作站試用計劃:申請理由 本人是嘉興技師學(xué)院教師,浙江機器人
發(fā)表于 09-18 19:24
工業(yè)機器人與視覺實訓(xùn)平臺介紹
、抓取、裝配、入庫等訓(xùn)練,2、工業(yè)機器人與視覺實訓(xùn)平臺包含六自由度工業(yè)機器人、智能視覺檢測系統(tǒng)、PLC控制系
發(fā)表于 07-01 06:38
KUKA機器人伺服驅(qū)動模塊維修
KUKA庫卡C4機器人驅(qū)動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅(qū)動模塊維修,庫卡
發(fā)表于 09-17 07:09
KUKA機器人視覺抓取的工作原理講解
BASE坐標(biāo)系: 可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡單 。在用戶坐標(biāo)系中, TCP 點將沿用戶自定義的坐標(biāo)軸方向運動。
KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
BASE坐標(biāo)系: 可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡單 。在用戶坐標(biāo)系中, TCP 點將沿用戶自定義的坐標(biāo)軸方向運動。
KUKA機器人視覺抓取的工作原理
BASE坐標(biāo)系: 可根據(jù)需要定義用戶坐標(biāo)系。 當(dāng)機器人配備多個工作臺時,選擇用戶坐標(biāo)系可使操作更為簡單 。在用戶坐標(biāo)系中, TCP 點將沿用戶自定義的坐標(biāo)軸方向運動。
發(fā)表于 09-16 15:35
?1041次閱讀
淺談機器人視覺抓取的目的
機器人視覺抓取的目的是使用一個機械手模型(包括二指或多指夾爪,吸盤等),以RGB或RGBD相機采集的場景圖像為輸入計算出一個最優(yōu)的抓取位姿,使機械手在該位姿下可以穩(wěn)定地
發(fā)表于 03-30 10:19
?1131次閱讀
基于視覺的機器人抓取系統(tǒng)設(shè)計
抓取綜合方法是機器人抓取問題的核心,本文從抓取檢測、視覺伺服和動態(tài)抓取等角度進(jìn)行討論,提出了多種

基于視覺的自主導(dǎo)航移動抓取機器人搭建方案
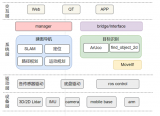
經(jīng)過以上對移動抓取機器人系統(tǒng)詳細(xì)的剖析,我們可以知道移動抓取機器人系統(tǒng)并不是簡單的“堆料”,而是以移動底盤的智能路徑規(guī)劃、視覺識別、移動底盤
發(fā)表于 12-19 15:09
?1658次閱讀



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論