") 與工業(yè)機器人、協(xié)作機器人和移動機器人最相關(guān)的功能安全標準
與工業(yè)機器人、協(xié)作機器人和移動機器人最相關(guān)的功能安全標準

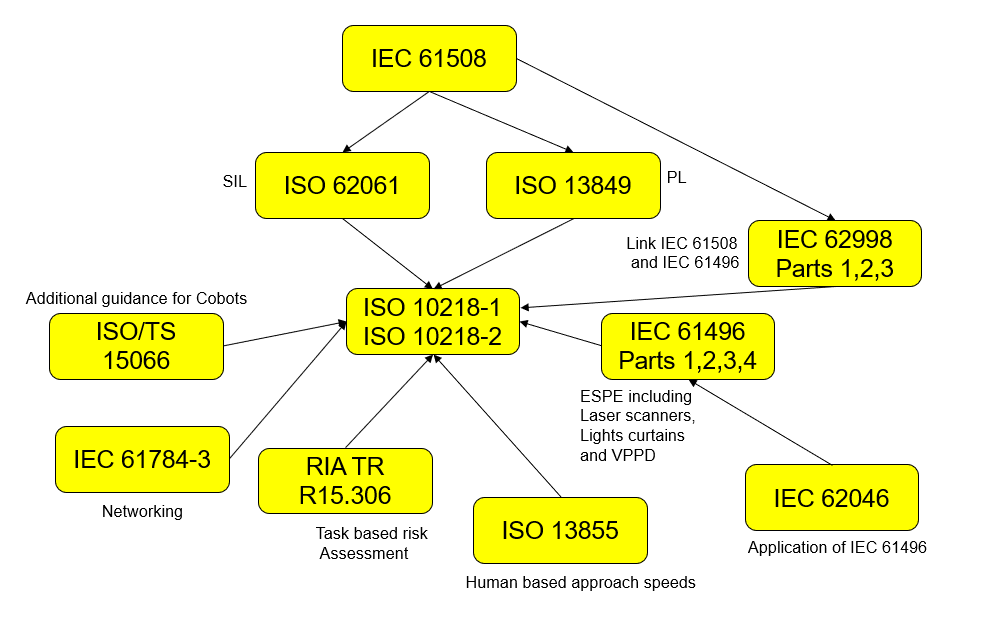
長期以來,我一直使用下圖來表示我認為與工業(yè)機器人和協(xié)作機器人(具有適合協(xié)作應用的功能的機器人,例如基于 PFL 功率和力限制的應用)最相關(guān)的安全標準。
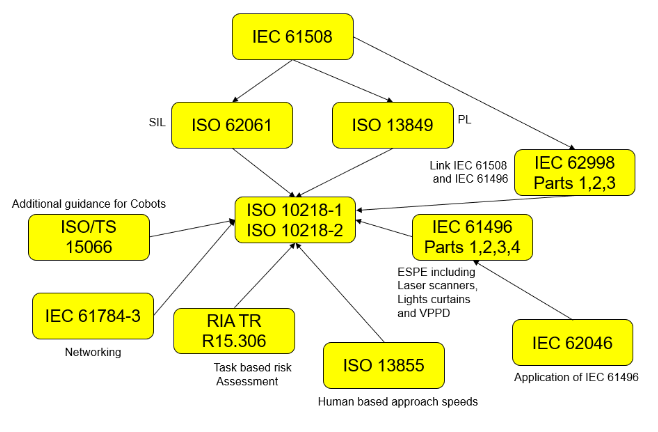
圖 1 - 固定式工業(yè)機器人和協(xié)作機器人的核心標準集
其中許多標準也與mobots(移動機器人)相關(guān),如果您將ISO 10218-1和ANSI R3691.4與ISO 15一起放在中間,而不是ISO 08-10218,則該數(shù)字可以重新用于mobots。根據(jù)您打算強調(diào)的內(nèi)容,也許您會重新配置移動機器人圖,如下所示。
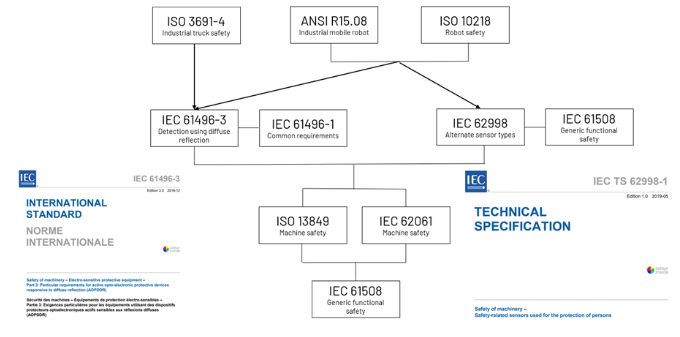
圖 2 - 這次標準的不同視圖強調(diào)了與 3D TOF 最相關(guān)的標準
但是,這兩個圖形仍然沒有顯示所有相關(guān)標準。即使我們忽略農(nóng)業(yè)機器人、人類輔助機器人、醫(yī)療機器人以及任何更有可能在餐廳比在工廠車間找到的東西,情況也是如此。附上一些想到的其他內(nèi)容以及原因。
IEC 62443 – 用于機器人的網(wǎng)絡安全。我注意到最近流傳的IEC 62443-1-5討論了配置文件,因此也許我們可以有一個機器人配置文件。我本可以包括更多工業(yè)網(wǎng)絡安全標準,但其中許多最終指向IEC 62443,所以我克制了自己。
IEC 62280/EN 50159 – 作為根據(jù) IEC 61784-3 進行聯(lián)網(wǎng)的替代方案
ISO TR 5469-1 – 如果您計劃將人工智能用作機器人安全論點的一部分
IEC 60825-1 – 如果您的 ESPE 發(fā)出激光
IEC 61800-5-2 – 適用于機器人中可能使用的變速驅(qū)動器,即使所有參考(可能不是全部)已從 ISO 3 的擬議修訂版 10218 中刪除。
IEC 61800-5-3 – 如果您的機器人出于安全目的使用編碼器
IEC 60204 – 如果沒有別的,則用于停止類別。還包括與無線控制相關(guān)的要求。
ISO DTR 20218-1 – 用于末端執(zhí)行器(包括夾具)的功能安全
ISO TR 20218-2 – 手動卸貨站的安全設計
IEC 61131-6 - 這是PLC標準,如果您使用PLC控制機器人
ISO 12100 – 這是機械的基本安全標準
ISO 11161-2 – IMS(集成制造系統(tǒng)又名機器人單元)的安全要求
ISO 13850 – 急停功能
ISO 13482 – 個人護理機器人的安全要求
機械指令 – 如果您希望在歐洲銷售您的機器人,盡管機器人通常只被視為部分完成的機器
審核編輯:郭婷
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
9082瀏覽量
155498 -
機器人
+關(guān)注
關(guān)注
213文章
31074瀏覽量
222189 -
編碼器
+關(guān)注
關(guān)注
45文章
3953瀏覽量
142617
發(fā)布評論請先 登錄
工業(yè)機器人經(jīng)典好書籍——《工業(yè)機器人》
資料:移動機器人能否自動充電?
Labview My RIO 移動機器人
履帶式移動機器人的設計
機器人、協(xié)作機器人和移動機器人,你分的清楚嗎
家庭移動機器人避障常用傳感器及相關(guān)技術(shù)
如何實現(xiàn)移動機器人的設計?
請問怎么設計一種室外移動機器人組合導航定位系統(tǒng)?
什么是移動機器人軟硬件系統(tǒng)問題
移動機器人的三種主要運動系統(tǒng)
基于Matlab和VR技術(shù)的移動機器人建模及仿真
移動機器人的分類與移動機器人技術(shù)研究現(xiàn)狀和未來發(fā)展的分析
如何區(qū)分機器人、協(xié)作機器人和移動機器人?
與工業(yè)機器人、協(xié)作機器人和移動機器人最相關(guān)的功能安全標準



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論