 暢行無阻 | AS-33C激光雷達,如何靈巧躲避每一個障礙物?
暢行無阻 | AS-33C激光雷達,如何靈巧躲避每一個障礙物?

【
安全
避障
】
一臺AGV正穿梭在無人工廠內
當它的前方出現障礙物,會發生意外嗎?
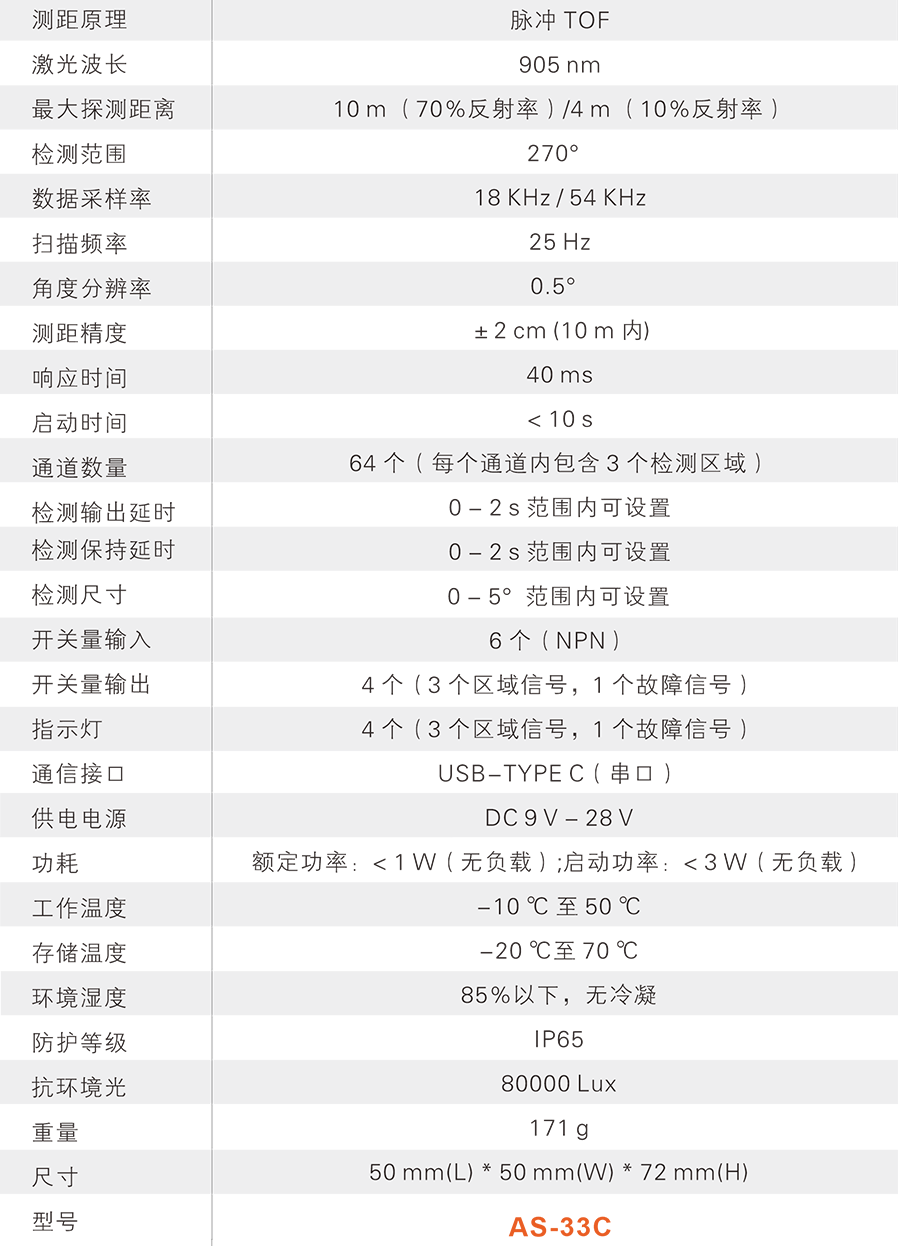
明治避障激光雷達的各類經典應用,采用的是TOF工作原理。精度高,反應速度快是TOF型激光雷達的主要優勢,這種特性使得它成為工業場景AGV/AMR小車雷達選型的理想選擇。
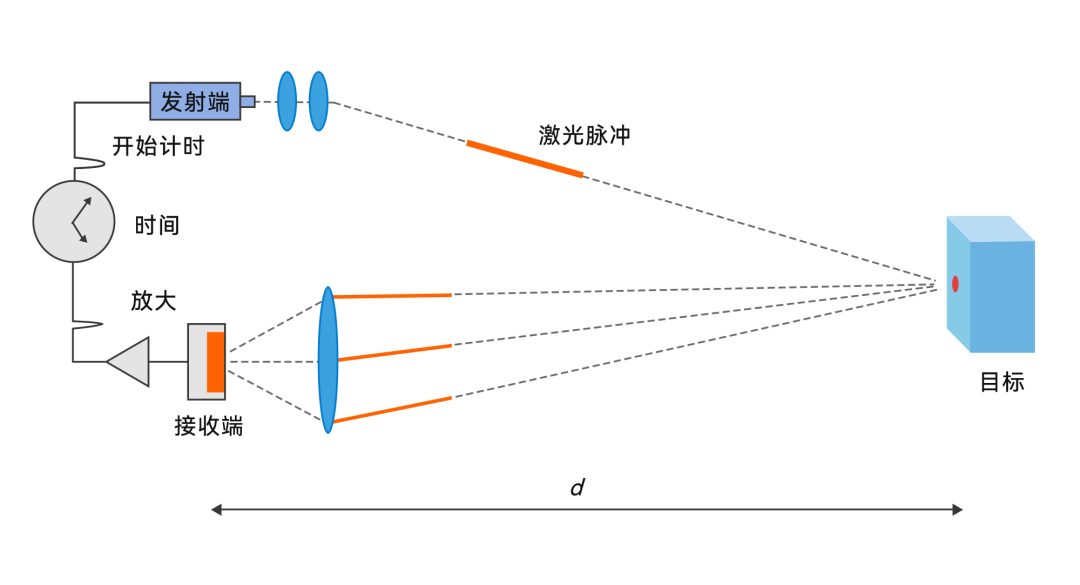
其工作原理是向目標發射一束光脈沖,然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,接收器準確地測量光脈沖從發射到被反射回的傳播時間。通過距離與速度和時間的關系,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數。
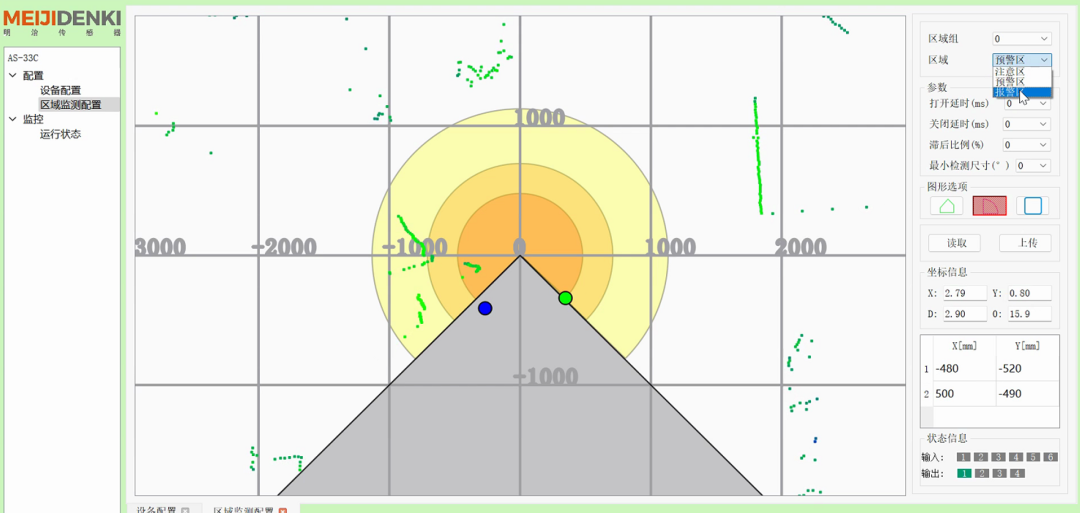
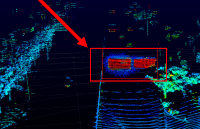
檢測區域設置演示
根據實際應用需求在軟件上劃定注意區、預警區以及報警區域
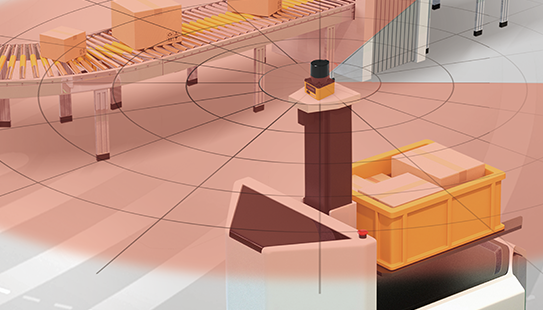
場景效果演示
AGV避障、叉車避障
明治的AS-33C激光雷達產品是保障AGV安全生產和提高生產效率的核心傳感器,與這一應用需求高度契合。
得益于AS-33C較遠的保護距離,以及較高的掃描頻率,即使是在快速應用中,AS-33C也能有效保護AGV的行駛安全和周邊設備、人員安全。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791367 -
激光雷達
+關注
關注
979文章
4470瀏覽量
196539
發布評論請先 登錄
相關推薦
熱點推薦
灰塵是如何影響激光雷達識別效果的?
[首發于智駕最前沿微信公眾號]在自動駕駛系統中,激光雷達作為重要的感知硬件,成為了很多車企的主要選擇。激光雷達雖然可以獲得環境的深度信息,但在灰塵較多的環境下,會出現返回信號被大量散射和衰減、點云中

禾賽科技位列全球激光雷達行業專利第一
Landscape Analysis 2025)。KnowMade 指出,禾賽在激光雷達領域的專利數量位居激光雷達行業全球第一,專利綜合強度激光雷達行業全球第

如何解決激光雷達點云中“鬼影”和“膨脹”問題?
[首發于智駕最前沿微信公眾號]之前在聊激光雷達點云“鬼影”和“膨脹”的文章中( 相關閱讀: 激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?),很多小伙伴都提到一個問題,那就是

激光雷達點云中“鬼影”和“膨脹”是什么原因導致的?
、位置,從而生成三維點云。基于這一原理,激光雷達能夠為自動駕駛系統提供對前方障礙物清晰、精準的感知能力。 但在實際應用中,當激光束照射到如車牌金屬層、鋁合金交通標志牌或反光膠貼等反射率
如何為自動駕駛汽車選擇一款合適的激光雷達?
物體離傳感器多遠。把很多這樣的測距結果按角度組織起來,就能得到一個三維的“點云”,用來表示周圍物體的形狀和位置。激光雷達的主要作用就是讓車知道周圍有哪些東西、在什么位置、大概是什么大小。 ? 它是怎么工作的?

禾賽科技與理想汽車續簽激光雷達合作
今日,全球激光雷達領先企業禾賽科技(NASDAQ: HSAI;HKEX: 2525)正式宣布獲得理想汽車全新一代輔助駕駛平臺全系車型激光雷達定點,包括 L 系列、 i 系列和 MEGA。禾賽科技也將繼續作為理想汽車的獨家
激光雷達為什么會出現串擾的問題?
飛行時間(Time-of-Flight,TOF)和連續波調頻型(Frequency-Modulated Continuous Wave,FMCW)兩種。 圖片源自:網絡 脈沖型TOF激光雷達雷達的工作原理比較直觀,發射器每隔一段

華為,激光雷達第一! 車載激光雷達市場的“隱形冠軍”
達到93.4%!相比此前1-5月份的三家份額91%進一步提高,激光雷達產業正形成“寡頭”競爭格局。 值得關注的是,華為以 64.38 萬顆的裝機量穩居榜首,市場份額攀升至 41.1%,成為車載激光雷達市場的“隱形冠軍”。 ? 作

如何使用自動駕駛激光雷達獲得的點云圖進行障礙物識別?
其實激光雷達給出的是三維點云——也就是一堆帶坐標(通常為x,y,z,有時帶強度/intensity、回波數/echo等額外通道)的離散點。每個點代表從傳感器到某個表面反射回來的激光脈沖的測距結果。點


AGV/AMR機器人單線激光雷達選型指南
隨著機器人行業的飛速發展,各種場景機器人的廣泛應用,激光雷達作為必不可少的傳感儀器在幫助機器人實現對環境的感知方面,遇到障礙物時能靈活繞障礙,在整個導航過程中可以精準停靠以及在特殊環境下的目標探測

SPAD席卷車載激光雷達市場
電子發燒友網報道(文/梁浩斌)上周我們報道了一款新推出的激光雷達ASIC方案,值得關注的是該方案中與ASIC搭配的傳感器均選擇了SiPM。當然從成本的角度來看,作為第三方的激光雷達ASIC方案
激光雷達調研紀要
、長安已跟上,廣汽、上汽等后續也可能加入,但具體配置情況因各車企方案而異。 不同級別自動駕駛配置差異: L3級自動駕駛因需安全冗余,會配備多顆激光雷達以實現360度或270度覆蓋,一般應用于30萬以上車型;L2+車型通常只配備一




 工商網監
工商網監
評論