 測評分享 | 如何在先楫HPM6750上運行輕量級AI推理框架TinyMaix
測評分享 | 如何在先楫HPM6750上運行輕量級AI推理框架TinyMaix

 本期內容由先楫開發者社區大咖@xusiwei1236分享基于先楫HPM6750的輕量級AI推理框架,趕緊來瞧瞧~
本期內容由先楫開發者社區大咖@xusiwei1236分享基于先楫HPM6750的輕量級AI推理框架,趕緊來瞧瞧~
一、TinyMaix是什么?
TinyMaix是國內sipeed團隊開發一個輕量級AI推理框架,官方介紹如下:TinyMaix 是面向單片機的超輕量級的神經網絡推理庫,即 TinyML 推理庫,可以讓你在任意單片機上運行輕量級深度學習模型。甚至在 Arduino ATmega328 (32KB Flash, 2KB RAM) 上都能基于 TinyMaix 進行手寫數字識別。TinyMaix官網提供了詳細介紹,可以在本文末尾的參考鏈接中找到鏈接。
二、TinyMaix移植
本節介紹如何將TinyMaix移植到HPM6750,詳細步驟如下:
2.1 開發環境搭建先楫官方支持SDK開發環境和RT-Thread開發環境,兩種開發環境的搭建方法均可在官方提供的開發板用戶手冊(HPM6750EVKMINI USER GUIDE.pdf 或 HPM6750EVK USER GUIDE.pdf 文件)中找到,也可以參考我此前發布的帖子,具體見本文最后的參考鏈接。考慮到TinyMaix對于現已支持的MCU,基準測試都是基于裸機進行的,因此這里使用的是HPM SDK開發環境。另外,基于裸機的移植在RTOS環境下一般也可以運行。因此,對于MCU芯片的計算類開源項目的移植(例如這里的TinyMaix),最好是基于裸機進行。使用的HPM SDK版本為0.14.0,使用的SEGGER Embedded Studio版本信息為:
SEGGER Embedded Studio for RISC-VRelease 6.40 Build 2022102501.51567Windows x64
2014-2022 SEGGER Microcontroller GmbH 1997-2022 Rowley Associates Ltd.
segger-cc: version 15.0.0segger-ld: version 4.36.0segger-rtl: version 4.20.0
GCC/BINUTILS: built using the GNU RISC-V Toolchain version GCC 12.20/Binutils 2.39 source distribution
Clang/LLVM:builtusingtheversion15.0.0sourcedistribution
2.2 TinyMaix移植步驟由于TinyMaix本身的源代碼文件不多,整個移植過程相對還是比較簡單的。整體基本上分為三步:
- 目錄規劃;
- 修改源碼;
- 編譯運行;
下面介紹具體操作步驟。2.2.1 目錄規劃考慮到TinyMaix和hpm_sdk都是使用CMake構建的,為了不對TinyMaix進行過多侵入性修改,這里采取的策略是——添加一個中間層。具體是將HPM6750平臺的CMakeLists.txt文件放在TinyMaix源碼目錄的上一層,如下所示:
hpm_sdk/app/├── CMakeLists.txt # HPM6750平臺的CMakeLists.txt├── src│ └── benchmark.c└── TinyMaix/ # TinyMaix源碼目錄
2.2.2 修改源碼
這里在src/benchmark.c文件內容如下:
#include #include "board.h"
#define MODEL_MNIST 1#define MODEL_CIFAR10 2#define MODEL_VWW 3#define MODEL_MBNET 4
#define CONFIG_MODEL MODEL_CIFAR10 // 修改這一行切換 測試程序
#define main benchmark_main#if (CONFIG_MODEL == MODEL_MNIST)#include "mnist/main.c"#elif (CONFIG_MODEL == MODEL_CIFAR10)#include "cifar10/main.c"#elif (CONFIG_MODEL == MODEL_VWW)#include "vww/main.c"#elif (CONFIG_MODEL == MODEL_MBNET)#include "mbnet/label.c"#include "mbnet/main.c"#endif#undef main
int main(void){ board_init();
printf("benchmark start...\n"); benchmark_main(0, NULL);
__asm__("wfi");return 0;}
為了不直接拷貝基準測試代碼,簡化代碼結構,這里使用了不太常見的:直接#include 某個.c文件;在#include "xxx/main.c"前面,定義宏#define main benchmark_main,之后取消宏定義;這樣實現了將TinyMaix原有的測試代碼作為benchmark.c一部分,而又不與這里的main函數相沖突的目的。PS:這里為了簡便,并沒有把TinyMaix放到hpm_sdk的middleware目錄,實際項目中使用的話最好將TinyMaix放到middleware目錄。另外,還需要修改`tm_port.h文件:
diff --git a/include/tm_port.h b/include/tm_port.hindex 357fc6b..5d1768c 100644--- a/include/tm_port.h+++ b/include/tm_port.h@@ -31,7 +31,7 @@ limitations under the License.#define TM_OPT_LEVEL TM_OPT0#define TM_MDL_TYPE TM_MDL_INT8#define TM_FASTSCALE (0) //enable if your chip don't have FPU, may speed up 1/3, but decrease accuracy-#define TM_LOCAL_MATH (0) //use local math func (like exp()) to avoid libm+#define TM_LOCAL_MATH (1) //use local math func (like exp()) to avoid libm#define TM_ENABLE_STAT (1) //enable mdl stat functions#define TM_MAX_CSIZE (1000) //max channel num //used if INT8 mdl //cost TM_MAX_CSIZE*4 Byte#define TM_MAX_KSIZE (5*5) //max kernel_size //cost TM_MAX_KSIZE*4 Byte@@ -49,9 +49,10 @@ limitations under the License.#define TM_DBGL() TM_PRINTF("###L%d\n",__LINE__);
/******************************* DBG TIME CONFIG ************************************/-#include -#include -#define TM_GET_US() ((uint32_t)((uint64_t)clock()*1000000/CLOCKS_PER_SEC))+#include "board.h"+#define TM_GET_US() (uint32_t)(HPM_MCHTMR->MTIME * 1000000uLL / clock_get_frequency(clock_mchtmr0))
#define TM_DBGT_INIT() uint32_t _start,_finish;float _time;_start=TM_GET_US();#defineTM_DBGT_START()_start=TM_GET_US();
2.2.3 編譯運行HPM6750項目的生成命令:
generate_project -b hpm6750evkmini -t flash_xip -f
HPM6750項目的編譯、運行,具體可以開發環境搭建文章,鏈接見本文末尾。手寫數字識別(mnist模型),運行后,串口輸出結果如下: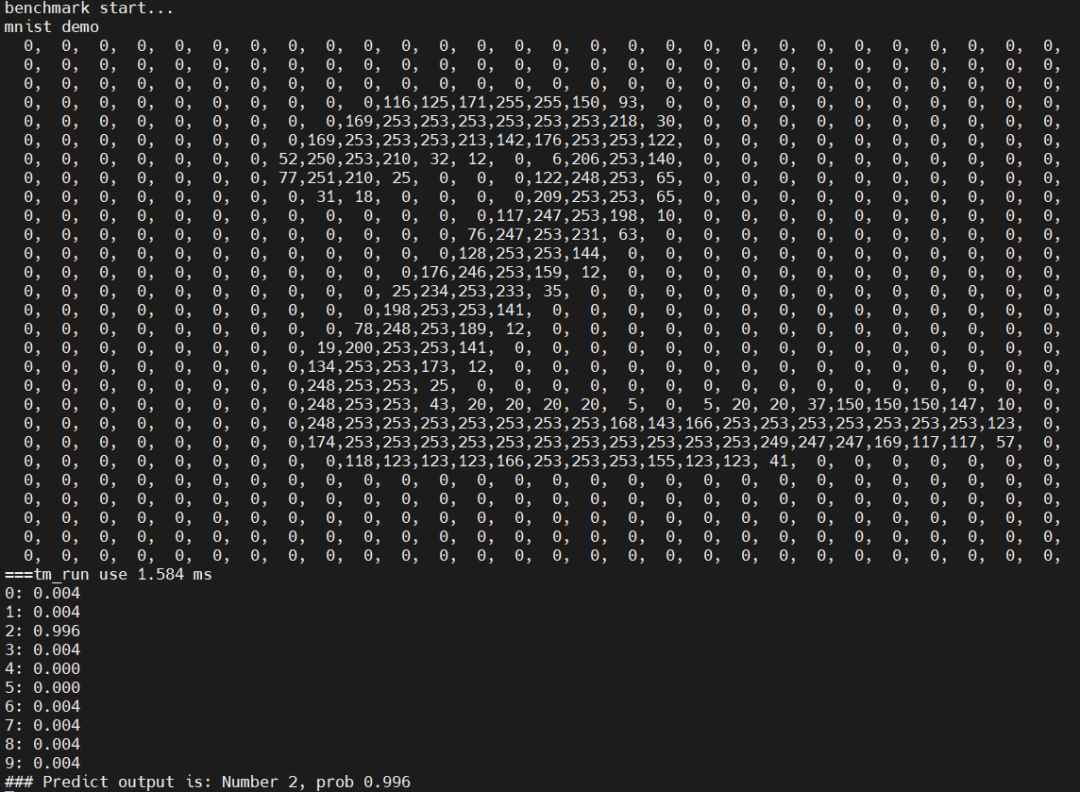
三、基準測試
下面是TinyMaix四種常用的基準測試模型的基準測試,四個模型分別為:
- mnist——手寫數字識別模型,輸入28x28x1
- cifar——10分類模型,輸入32x32x3
- vww——人體檢測二分類模型,輸入96x96x3,輸出有無人
- mbnet——1000分類模型,輸入128x128x3
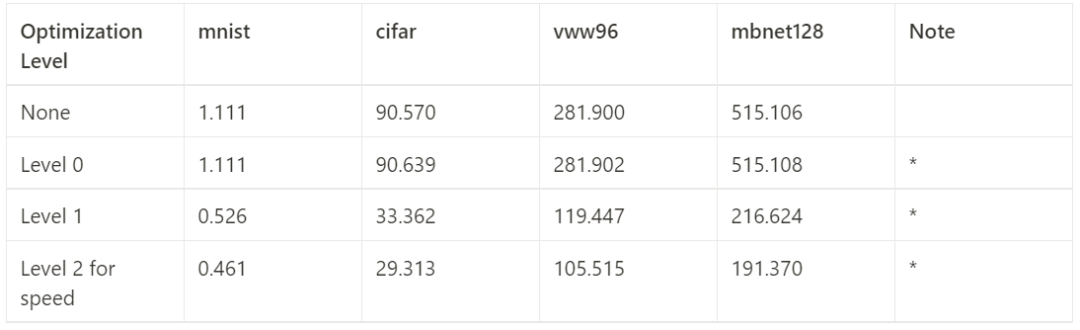
3.1 場景1: TM_MDL_INT8 + TM_OPT0
3.2 場景2: TM_MDL_INT8 + TM_OPT1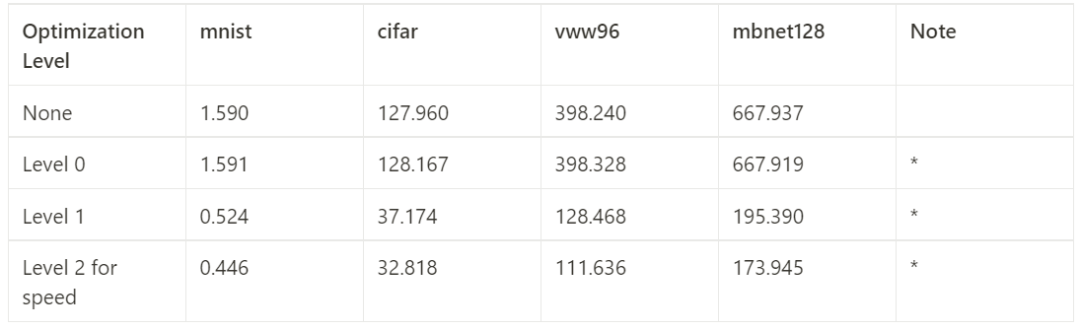
3.3 場景3: TM_MDL_FP32 + TM_OPT0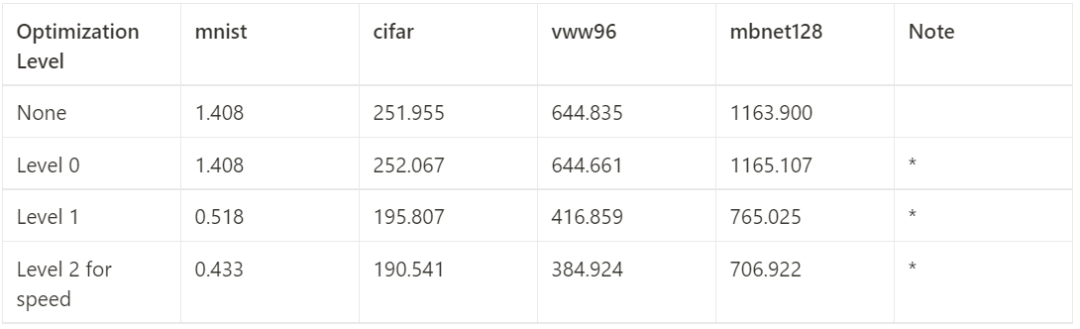
3.4 注意事項
- 在SEGGER Embedded Studio中, 可以通過如下菜單Project 'xxx' Options -> Code -> Code Generation -> Optimization Level修改優化等級;
- 在SEGGER Embedded Studio中, 默認的堆大小設置為16384 字節(16KB),不夠運行vww96 和 mbnet128 模型,你可以通過菜單 Code -> Runtime Memory Area -> Heap Size修改具體配置大小,例如可以為524288(512KB);
- 對于FP32模型,需要將RISC-V ISA設置從默認的rv32imac改為rv32gc(Code -> Code Generation -> RIS-V ISA),確保編譯器可以生成浮點數操作指令。
-
AI
+關注
關注
91文章
40715瀏覽量
302355 -
先楫半導體
+關注
關注
12文章
287瀏覽量
3375
發布評論請先 登錄
hpm6750 高頻發送 udp_send 時 過一段時間就返回ERR_INPROGRESS
【瑞薩AI挑戰賽】手寫數字識別模型在RA8P1 Titan Board上的部署
hpm6750 兩個板載網卡+usbcdc_ecm網卡,多次調用ftp,切換網卡后,報錯
瑞芯微SOC智能視覺AI處理器
如何在DGX Spark上運行NVIDIA Omniverse

【CW32】uart_obj_fw 輕量級串口框架
請問如何在RK3588上使用npu,用onnx模型來推理
基于米爾瑞芯微RK3576開發板部署運行TinyMaix:超輕量級推理框架
如何在RK3576開發板上運行TinyMaix :超輕量級推理框架--基于米爾MYD-LR3576開發板
信而泰×DeepSeek:AI推理引擎驅動網絡智能診斷邁向 “自愈”時代
先楫半導體HPM6E8Y:先楫實時控制芯片驅動的機器人關節“芯”時代

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導體再拓工業總線產品新版圖




 工商網監
工商網監
評論