") EtherCAT總線在工業(yè)機器人上的應(yīng)用
EtherCAT總線在工業(yè)機器人上的應(yīng)用

EtherCAT是一項高性能、低成本、應(yīng)用簡易、拓撲靈活的工業(yè)以太網(wǎng)技術(shù)。2014年正式轉(zhuǎn)化為中國推薦性國家標準,EtherCAT技術(shù)為中國制造業(yè)的轉(zhuǎn)型升級高效、高品質(zhì)、高端化提供了契機。
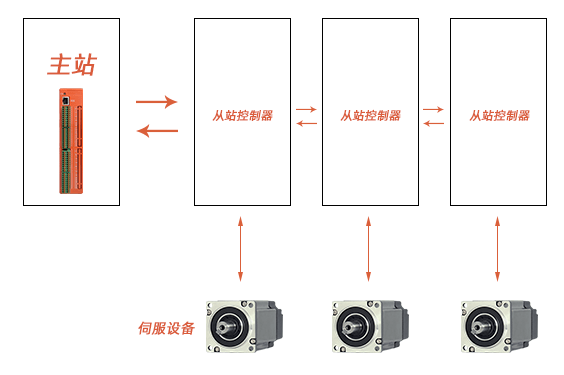
EtherCAT工業(yè)以太網(wǎng)總線,整個系統(tǒng)分成了兩部分:主站和從站。其中,主站的作用是將以太網(wǎng)幀發(fā)送給各個從站,而從站的作用是對主站發(fā)送來的以太網(wǎng)數(shù)據(jù)幀進行處理,包括抽取數(shù)據(jù)和反過來插入數(shù)據(jù)幀。各個從站按順序依次接收報文并處理后,把處理后的報文傳輸給下一個從站,末尾從站發(fā)回被完整處理過后的報文,以完成整個數(shù)據(jù)的傳輸反饋。
EtherCAT的特點:
1、性能優(yōu)
EtherCAT實時以太網(wǎng)網(wǎng)絡(luò),1000個分布式I/O數(shù)據(jù)的刷新周期僅為30us,其中包括端子循環(huán)時間。通過一個以太網(wǎng)幀,可以交換高達1486字節(jié)的過程數(shù)據(jù),幾乎相當于12000個數(shù)字量I/O。而這一數(shù)據(jù)量的傳輸僅用300us。與100個伺服軸的通訊只需100us。而且整體的同步時鐘,得到很好的校準,實現(xiàn)諸多從站,低于1us差異的同步。
其優(yōu)異性能可以實現(xiàn)傳統(tǒng)現(xiàn)場總線系統(tǒng)所無法實現(xiàn)的控制方法,通過總線可以形成超高速控制回路。以前需要本地專用硬件支持的功能,現(xiàn)在只要在軟件中加以映射。巨大的帶寬資源使狀態(tài)數(shù)據(jù)與任何數(shù)據(jù)可并行傳輸。
EtherCAT的高速循環(huán),可以在兩個控制之間循環(huán)完成。因此,控制器總有可用的最新輸入數(shù)據(jù),輸出編制的延遲最小。在無需增強本身計算能力的基礎(chǔ)上,控制器的響應(yīng)行為得到顯著改善。
2、開放性
EtherCAT技術(shù)不僅與以太網(wǎng)完全兼容,而且還有特別的設(shè)計開放性特點:該協(xié)議可與其他提供各種服務(wù)的以太網(wǎng)協(xié)議并存,并且所有的協(xié)議都并存于同一物理介質(zhì)中-通常只會對整個網(wǎng)絡(luò)性能有很小程度的影響。標準的以太網(wǎng)設(shè)備可通過交換機端子連接至一個EtherCAT系統(tǒng),該端子并不會影響循環(huán)時間。配備傳統(tǒng)現(xiàn)場總線接口的設(shè)備可通過EtherCAT現(xiàn)場總線主站端子的連接集成到網(wǎng)絡(luò)中。UDP協(xié)議變體允許被整合于任何插槽接口中。EtherCAT是一個完全開放式協(xié)議,它已被認定為一個正式IEC規(guī)范(IEC/PAS62407)。
EtherCAT總線在機器人領(lǐng)域方案
工業(yè)機器人包裝領(lǐng)域的應(yīng)用
隨著國家制造業(yè)的轉(zhuǎn)型及《中國制造2025》的全面實施,工業(yè)機器人行業(yè)的發(fā)展,傳統(tǒng)的脈沖模式控制存在著很大程度上對機器人性能的制約,高速工業(yè)現(xiàn)場總線成為機器人主力發(fā)展方向,其更加可靠、高效的總線解決方案,且易于與現(xiàn)場其它設(shè)備組網(wǎng),為實現(xiàn)自動化流水線及建立智能工廠提供了基礎(chǔ)。
EtherCAT總線在工業(yè)機器人的應(yīng)用,利用了以太網(wǎng)協(xié)議完成工業(yè)自動化的控制,滿足了工業(yè)控制工程中的通信穩(wěn)定、大數(shù)據(jù)量,低延時性等優(yōu)勢。此外,在其他行業(yè),如半導體、壓機、注塑、木材加工、自動化生產(chǎn)線等行業(yè),EtherCAT都取得了廣泛的應(yīng)用。
-
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3534瀏覽量
98196
發(fā)布評論請先 登錄
如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數(shù)據(jù)?

探索RISC-V在機器人領(lǐng)域的潛力
高精度機器人控制的核心——基于 MYD-LT536 開發(fā)板的精密運動控制方案
工業(yè)機器人線束揭秘 | 性能加持助力機器人作業(yè)效率穩(wěn)定躍升

工業(yè)機器人的特點
聚集工業(yè)機器人產(chǎn)業(yè) | 解碼工業(yè)線束選型標準
工業(yè)通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
工業(yè)機器人與協(xié)作機器人概念不同

當PLC遇上電焊機器人:EtherCAT轉(zhuǎn)CANopen上演工業(yè)級“語言翻譯官”
盤點#機器人開發(fā)平臺
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
EtherCAT科普系列(7): EtherCAT技術(shù)在工業(yè)機器人控制系統(tǒng)領(lǐng)域的應(yīng)用

為工業(yè)通信架起一座高效、穩(wěn)定的橋梁!疆鴻智能Ethercat轉(zhuǎn)TCP/IP解決方案應(yīng)運而生!
工業(yè)機器人工作站的建設(shè)意義
工業(yè)機器人4大控制方式,你知道幾種?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論