 還可以這樣實現ARM+ROS(機器人操作系統)
還可以這樣實現ARM+ROS(機器人操作系統)

如何低成本搭建ARM+ROS的硬件載體?本文將為讀者提供一個全新的技術方案。全文分概述、硬件與底層、ROS搭建三個章節,敬請訂閱。
1.ROS簡介
ROS是機器人操作系統(RobotOperatingSystem)的英文縮寫,是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構,其原型源自斯坦福大學的StanfordArtificialIntelligenceRobot(STAIR)和PersonalRobotics(PR)項目。

ROS是一個用于實現機器人編程和開發復雜機器人應用程序的開源軟件框架,依托于Linux之類的操作系統上,所以ROS也被稱為元操作系統或中間件軟件框架。ROS提供了各類成熟的功能包,如:攝像頭驅動、OpenCV圖像處理、SLAM建圖導航等。功能包中的代碼可以是C++、Python、Octave等不同的編程語言編寫,雖然不同模塊基于不同語言編寫,但仍可以被ROS組合起來一起使用。這意味著,當開發新款機器人時,開發者不需要做基礎的傳感器驅動、甚至不必實現某些應用,直接調用ROS自帶的功能包,同時ROS是分布式架構,對于大型復雜機器人而言,可以把各個功能分別部署在不同控制板上。

2.硬件介紹
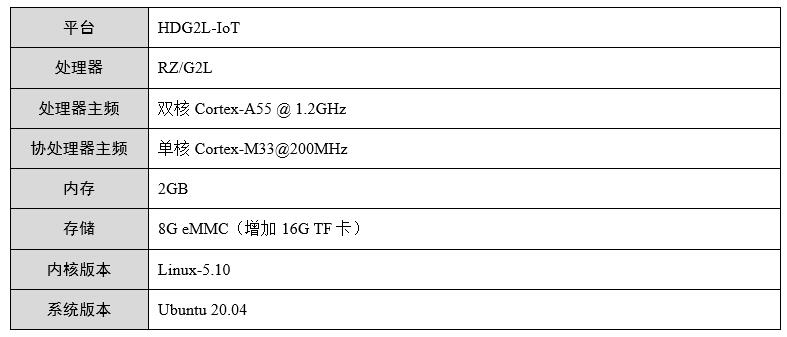
本文檔使用本司的HDG2L-IoT評估套件來實現ROS應用環境,硬件產品如下所示。

硬件平臺環境條件如下所示:
表2.1硬件平臺資源
3.技術總結
目前實現ROS的方式主要有兩種:
Ubuntu系統+ROS;
Ubuntu系統+docker+ROS鏡像;
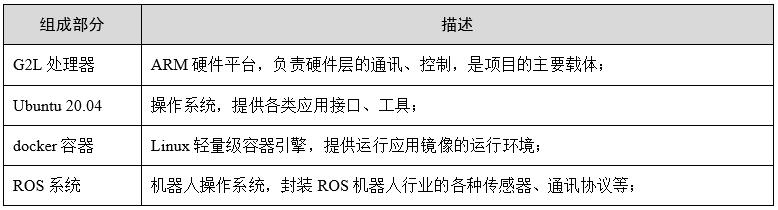
相對而言,使用dockers運行ROS鏡像的部署方式,可以大大加快設備部署、移植工作。第二章節也將基于方案2去實現ROS,組成項目的各個部分功能如下所示:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ARM
+關注
關注
135文章
9553瀏覽量
391896
發布評論請先 登錄
相關推薦
熱點推薦
RK平臺ROS2適配全指南:從編譯到運行,手把手搞定嵌入式機器人開發
Operating System 2)作為新一代機器人操作系統,在分布式通信、實時性、多語言支持上的升級,更是嵌入式機器人開發的核心框架。

資訊速遞 | 具身智能PMC(籌)發布“零成本”開源鴻蒙智能機器人系統
面向具身智能機器人系統與應用開發,Ubuntu 等操作系統可以用 ROS2 生態、機器人仿真器、

潤和軟件亮相2025智能機器人操作系統開源社區生態大會
12月5日,智能機器人操作系統開源社區(AGIROS)生態大會在北京圓滿舉行。大會以“開源聚智,筑基未來”為主題,匯聚來自全國頂尖科研機構、領軍企業、核心開發者及行業伙伴,共探智能機器人產業生態融合新路徑。

EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用
EtherCAT主站協議棧EC-Master在ROS(機器人操作系統)中的應用

探索RISC-V在機器人領域的潛力
運行ROS 2,充分證明了RISC-V架構完全有能力承載機器人操作系統這樣的復雜軟件棧。它不僅是學習RISC-V的絕佳工具,更是探索未來邊緣計算和智能
發表于 12-03 14:40
NVIDIA助力新一代機器人開發開源框架
今年的 ROSCon 在新加坡舉辦,并于 10 月 29 日順利閉幕。大會吸引了全球機器人操作系統(ROS)領域開發者的關注。ROS 是目前全球應用最廣泛的
鴻道Intewell操作系統:人形機器人底層操作系統
操作系統的實時性賦能東土科技的鴻道(Intewell)工業操作系統作為國內唯一通過汽車、工業控制、醫療、軌道交通四項功能安全認證的系統,為標準體系中的技術層架構提供了底層支持。其微內核虛擬化架構可將人形
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
2的cv_bridge庫,可以輕松實現ROS圖像消息與OpenCV格式的轉換,這在實際開發中極為便利。
視覺巡線與二維碼識別的應用
視覺巡線是機器人自主導航的經典案例,書中從仿真到
發表于 05-03 19:41
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
的知識,還需要對ROS 2的節點通信和數據處理有一定的了解。通過實踐這一部分內容,我掌握了如何在ROS 2中實現二維碼識別,這對于提高機器人的智能性和交互性具有重要意義。
地圖構建:S
發表于 04-27 11:42
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
講解了如何在 ROS 2 中實現機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節點,可以接收來自上層的控制指令,如速度指令或目標位置指令,然后通過底層的驅動程序控制
發表于 04-27 11:24
深開鴻推出全國首個基于開源鴻蒙的機器人操作系統
在智能制造浪潮的推動下,機器人已成為工業升級的核心驅動力。然而,操作系統作為機器人產業的“魂”,直接決定了機器人的智能化水平、協同能力和生態擴展性。長期以來,
全國首個基于開源鴻蒙的機器人操作系統M-Robots OS正式發布,中國機器人產業進入“群體智能”新時代
2025年4月9日,深開鴻在廣東省人工智能與機器人產業創新產品與服務新聞發布會上正式發布全國首個基于開源鴻蒙的分布式異構多機協同機器人操作系統——M-RobotsOS(Multi-RobotsOS

鴻道AI機器人操作系統亮相中關村論壇
目前,鴻道操作系統已廣泛應用于我國飛機、高鐵、汽車、船舶、電網電力、數控機床、工業機器人、數字工廠等領域。與此同時,東土科技成功發布 AUTBUS 國際標準,并孵化出全球首顆AUTBUS總線芯片




 工商網監
工商網監
評論