") 巍泰技術(shù)客流統(tǒng)計(jì)毫米波雷達(dá)與 紅外、激光、視頻、熱成像、人臉識(shí)別等技術(shù)分析對比
巍泰技術(shù)客流統(tǒng)計(jì)毫米波雷達(dá)與 紅外、激光、視頻、熱成像、人臉識(shí)別等技術(shù)分析對比

目前,比較常見的客流統(tǒng)計(jì)技術(shù)有如下幾種:
1、紅外客流統(tǒng)計(jì)
利用一對紅外收發(fā)設(shè)備安裝于門的兩側(cè),人體經(jīng)過時(shí)會(huì)阻斷紅外線之間的對射,以此實(shí)現(xiàn)客流統(tǒng)計(jì)。當(dāng)有人進(jìn)入時(shí),第一路設(shè)備紅外光束先被人體阻斷,然后另一路也被阻斷,這時(shí)系統(tǒng)會(huì)自動(dòng)計(jì)入一個(gè)進(jìn)入客流。反之,當(dāng)?shù)诙吩O(shè)備的紅外光束被人體阻斷之后,第一路緊跟被阻斷,這時(shí)系統(tǒng)會(huì)自動(dòng)計(jì)入一個(gè)離開的客流。但受遮擋影響較大,其監(jiān)測區(qū)域有限,無法同時(shí)監(jiān)測多個(gè)(并排)人員目標(biāo),無法提供目標(biāo)的位置(距離、速度和角度)等測量信息、無法進(jìn)行雙向統(tǒng)計(jì)等。
2、激光客流統(tǒng)計(jì)
激光客流統(tǒng)計(jì)跟紅外感應(yīng)客流統(tǒng)計(jì)的原理相同,利用激光的不可見、全天時(shí)、高分辨率等優(yōu)點(diǎn)向特定區(qū)域內(nèi)發(fā)射激光光束,通過機(jī)械掃描對區(qū)域內(nèi)的目標(biāo)進(jìn)行探測,獲取數(shù)量、距離和方位信息。但易受到外界因素干擾,使其統(tǒng)計(jì)數(shù)據(jù)產(chǎn)生較大誤差;對于比較寬的門口,多人同時(shí)經(jīng)過的時(shí)候也容易產(chǎn)生漏數(shù)現(xiàn)象;無法很好地判斷顧客是進(jìn)入或是出去,只能統(tǒng)計(jì)到是有人經(jīng)過,因此數(shù)據(jù)采集的單一性影響客流分析的結(jié)果。同時(shí),激光的使用多少會(huì)對人體有傷害的,在激光的傷害中,以機(jī)體中眼睛的傷害最為嚴(yán)重。
3、熱成像客流統(tǒng)計(jì)
通過感應(yīng)移動(dòng)物體與背景物體的溫度差異來確定區(qū)域內(nèi)是否存在人體目標(biāo),但是這種技術(shù)動(dòng)作監(jiān)測靈敏度低,受溫度影響大,環(huán)境適應(yīng)性差。
4、基于頂裝單目魚眼攝像頭的視頻客流統(tǒng)計(jì)
基于計(jì)算機(jī)視覺算法對人員的頭、肩等信息進(jìn)行檢測,當(dāng)提取的個(gè)體特征符合預(yù)設(shè)規(guī)則時(shí),實(shí)現(xiàn)自動(dòng)客流量統(tǒng)計(jì)。但容易受到環(huán)境光的影響,當(dāng)環(huán)境光不足或在夜間時(shí),識(shí)別率會(huì)明顯下降。在行人穿戴帽子或相互距離很近時(shí),容易無法識(shí)別出通道內(nèi)的行人,且無法判斷行人的行進(jìn)方向。
5、基于頂裝3D攝像頭的視頻客流統(tǒng)計(jì)
通過對兩個(gè)鏡頭采集的視頻進(jìn)行計(jì)算處理,以獲取視頻里物體的高度信息,并匹配與人體高度接近的運(yùn)動(dòng)目標(biāo)實(shí)現(xiàn)人員檢測。但容易受到環(huán)境影響,如臨街玻璃墻幕光線,地毯、地磚顏色等。對于身高較矮的小孩,較容易被漏計(jì)。
6、頂裝TOF深度攝像頭
飛行時(shí)間測距法(TOF)通過對目標(biāo)連續(xù)發(fā)送光脈沖,探測光脈沖的飛行時(shí)間來得到物體距離和深度信息。頂裝TOF深度攝像頭對光線條件很敏感。
7、基于WiFi/藍(lán)牙MAC的客流統(tǒng)計(jì)
通過WiFi/藍(lán)牙信號來獲取智能手機(jī)設(shè)備MAC地址,進(jìn)而實(shí)現(xiàn)客流量統(tǒng)計(jì)。但并非所有的客戶都攜帶手機(jī),其中也不是所有客戶都會(huì)打開WiFi/藍(lán)牙。此外,WiFi/藍(lán)牙信號探測的有效距離太遠(yuǎn),在門店附近但未走進(jìn)門店的人員也會(huì)被誤統(tǒng)計(jì)。
8、基于人臉的客流統(tǒng)計(jì)
人臉識(shí)別AI智能安全攝像頭能夠捕捉鏡頭范圍內(nèi)的所有人臉,并對人員進(jìn)行聚類,即同一個(gè)人僅計(jì)入一次。同時(shí),通過人臉去重技術(shù),能夠獲得準(zhǔn)確的客流量數(shù)據(jù),但人臉識(shí)別存在較大的隱私風(fēng)險(xiǎn)。
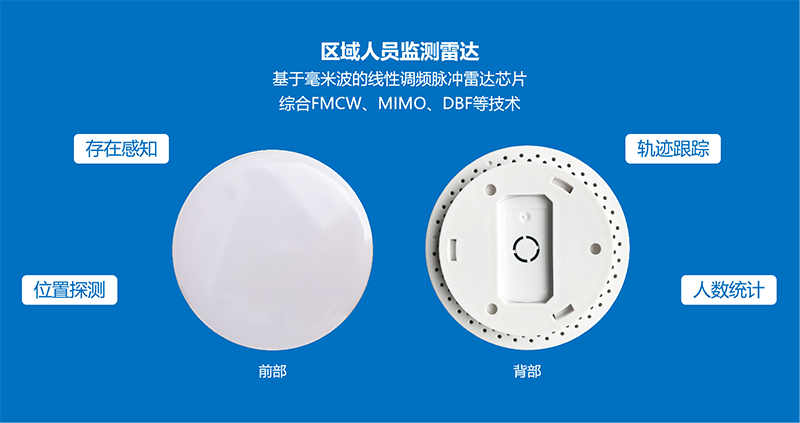
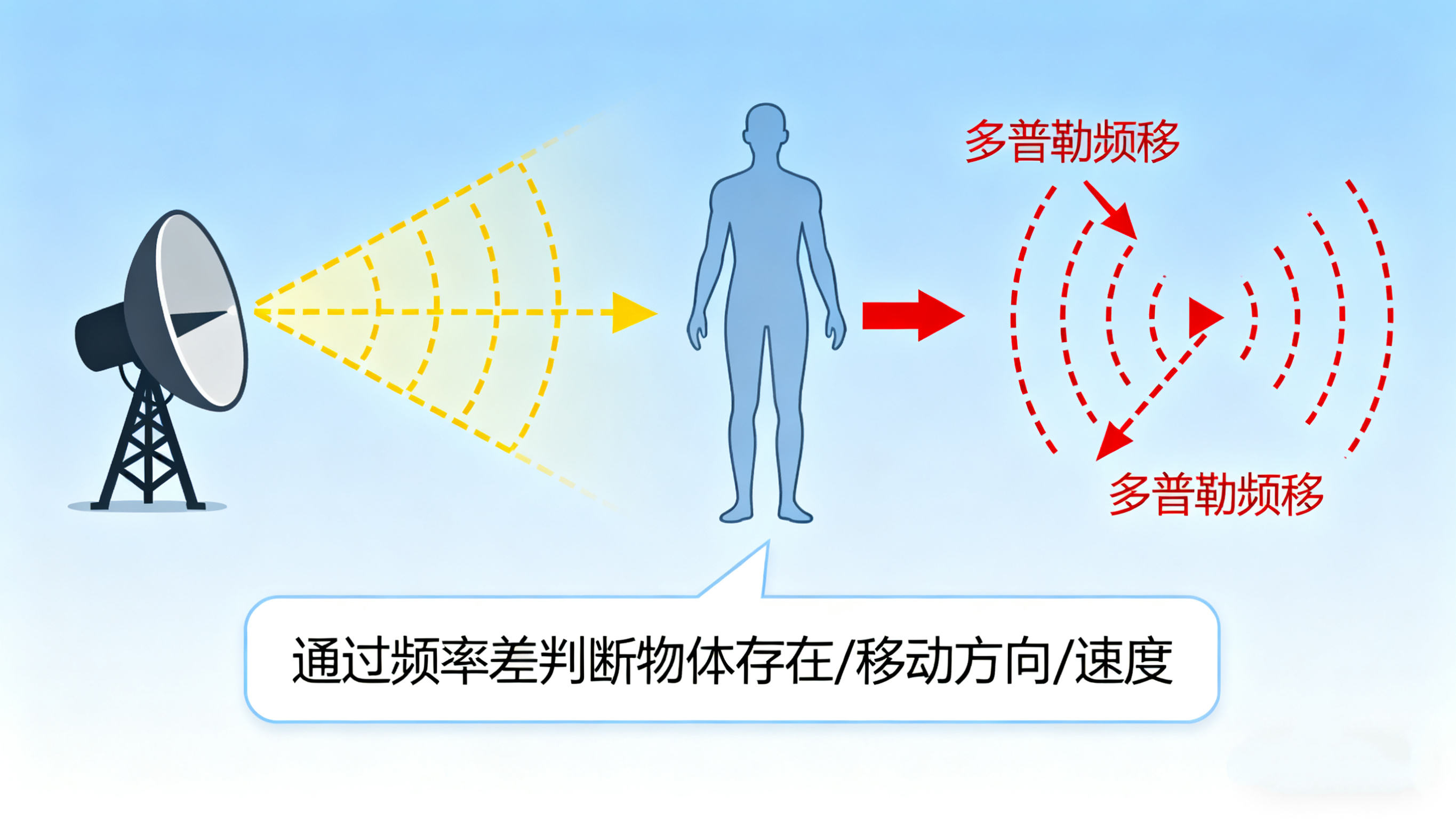
9、毫米波雷達(dá)客流統(tǒng)計(jì)
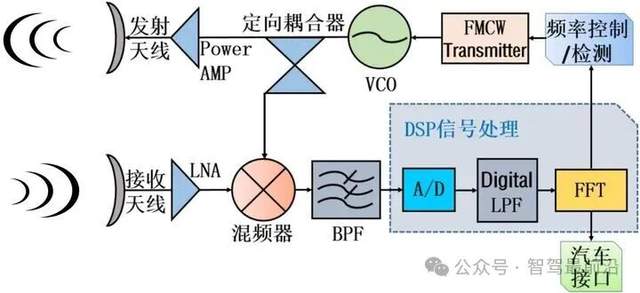
毫米波雷達(dá)基于毫米波的線性調(diào)頻脈沖雷達(dá)芯片,綜合FMCW、MIMO、DBF等技術(shù),通過對監(jiān)測區(qū)域內(nèi)移動(dòng)目標(biāo)人員所反射電磁波的計(jì)算分析,判斷目標(biāo)人員是否進(jìn)入所設(shè)定的監(jiān)測區(qū)域內(nèi),統(tǒng)計(jì)并輸出各區(qū)域內(nèi)監(jiān)測到的目標(biāo)人員數(shù)量,并獲取目標(biāo)人員當(dāng)前的速度、位置和方向,實(shí)現(xiàn)軌跡跟蹤。巍泰技術(shù)區(qū)域人員監(jiān)測毫米波雷達(dá)WTR-820具備全天候的特性,在環(huán)境穩(wěn)健性方面比其他傳感器優(yōu)異很多,具有距離精度高、速度精度高、角度分辨率高及虛警率低等優(yōu)點(diǎn),可以實(shí)現(xiàn)對人員的準(zhǔn)確監(jiān)測和精確定位,穩(wěn)定輸出人員的距離、速度和角度等信息。因其通過射頻信號采集人員信息,不會(huì)采集視頻圖像,因此在保護(hù)個(gè)人隱私方面更有優(yōu)勢。
1)產(chǎn)品特色
a.覆蓋6×8m區(qū)域,可同時(shí)跟蹤24個(gè)目標(biāo),目標(biāo)定位精度達(dá)±0.1m;
b.實(shí)時(shí)統(tǒng)計(jì)進(jìn)出口和通道人員數(shù)量或室內(nèi)環(huán)境指定區(qū)域人員密度等;
c.可在各種環(huán)境中保持穩(wěn)定的移動(dòng)人體檢出準(zhǔn)確率,綜合檢出率達(dá)95%;
d.雷達(dá)不采集視頻圖像,符合《個(gè)人信息保護(hù)法》,保護(hù)客戶隱私,輔助決策;
e.抗環(huán)境干擾,監(jiān)測結(jié)果不受光線、氣體、煙塵等影響;
f.能穿透一定厚度的亞克力、廣告橫幅、木板等材質(zhì)。
2)方案思路
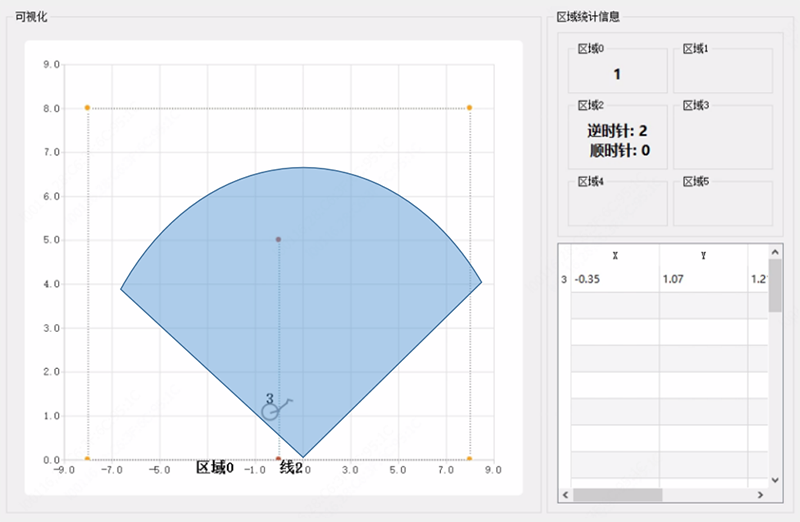
a.繪制設(shè)定監(jiān)測區(qū)域與計(jì)數(shù)絆線;
b.雷達(dá)對監(jiān)測區(qū)域發(fā)射電磁波信號,隨后接收反射回來的信號;
c.統(tǒng)計(jì)進(jìn)出監(jiān)測區(qū)域與經(jīng)過計(jì)數(shù)絆線的目標(biāo)數(shù)量;
d.對監(jiān)測區(qū)域內(nèi)反射電磁波信號的運(yùn)動(dòng)目標(biāo)進(jìn)行位置信息獲取和軌跡跟蹤;
e.不斷刷新監(jiān)測區(qū)域目標(biāo)數(shù)量與軌跡信息。
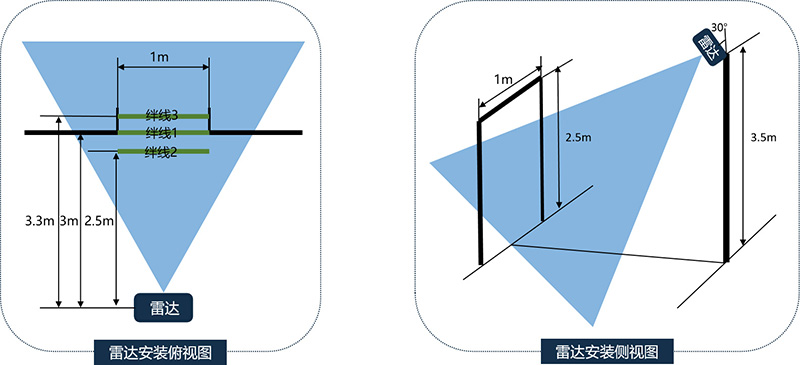
3)安裝示圖
4)典型應(yīng)用

-
毫米波雷達(dá)
+關(guān)注
關(guān)注
108文章
1162瀏覽量
66256
發(fā)布評論請先 登錄
突破10米限制:解碼飛睿智能UWB毫米波雷達(dá)融合感知技術(shù)

突破10米限制:解碼飛睿智能UWB毫米波雷達(dá)融合感知技術(shù)
雨霧天氣,毫米波雷達(dá)表現(xiàn)為什么比激光雷達(dá)更好?
德國大陸 ARS 408毫米波雷達(dá)外觀和標(biāo)準(zhǔn)探測分析

24GHz毫米波雷達(dá)模塊:人體存在感知特點(diǎn)在智能家居應(yīng)用的“技術(shù)解剖”
毫米波雷達(dá)模塊技術(shù)解析與minewsemi國產(chǎn)化模塊分享
微波雷達(dá)和毫米波雷達(dá)有什么區(qū)別
全國產(chǎn)化毫米波雷達(dá)模組技術(shù)解析及智能感知應(yīng)用方案指南
紅外熱成像VS傳統(tǒng)傳感器:智能駕駛感知的優(yōu)勝之選

恩智浦如何釋放毫米波雷達(dá)的技術(shù)潛力
一文帶你了解海凌科毫米波雷達(dá)

泰克示波器TBS1102C在毫米波雷達(dá)研發(fā)中的關(guān)鍵測試方案

自動(dòng)駕駛毫米波雷達(dá)之間會(huì)相互干擾嗎?

毫米波雷達(dá)+AI識(shí)別:智能閘口的核心技術(shù)

ADAS和防撞系統(tǒng)中的毫米波雷達(dá)方案




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論