") 紅外熱成像VS傳統(tǒng)傳感器:智能駕駛感知的優(yōu)勝之選
紅外熱成像VS傳統(tǒng)傳感器:智能駕駛感知的優(yōu)勝之選

在智能駕駛飛速發(fā)展的時(shí)代,精準(zhǔn)、可靠的環(huán)境感知是保障行車安全與實(shí)現(xiàn)自動(dòng)駕駛功能的核心基礎(chǔ)。傳統(tǒng)傳感器,如可見光攝像頭、毫米波雷達(dá)和激光雷達(dá)等,在智能駕駛感知系統(tǒng)中占據(jù)著重要地位。然而,隨著技術(shù)的不斷演進(jìn)和應(yīng)用場(chǎng)景的日益復(fù)雜,紅外熱成像技術(shù)憑借其獨(dú)特優(yōu)勢(shì),正逐漸嶄露頭角,成為智能駕駛感知領(lǐng)域不可忽視的力量。本文將深入對(duì)比紅外熱成像與傳統(tǒng)傳感器,剖析紅外熱成像在智能駕駛感知中的優(yōu)越性。
一、傳統(tǒng)傳感器在智能駕駛感知中的現(xiàn)狀與局限
1. 攝像頭
攝像頭是智能駕駛中最常用的傳感器之一,它能夠提供豐富的視覺信息,類似于人類的眼睛。通過圖像識(shí)別算法,攝像頭可以識(shí)別交通標(biāo)志、車道線、行人以及其他車輛等目標(biāo)。然而,攝像頭對(duì)光照條件極為敏感。在強(qiáng)光直射、逆光或低光照環(huán)境下,圖像質(zhì)量會(huì)大幅下降,導(dǎo)致目標(biāo)識(shí)別困難。例如,在夜晚或隧道內(nèi),攝像頭的性能會(huì)受到很大限制,難以準(zhǔn)確捕捉周圍環(huán)境信息。此外,攝像頭還容易受到惡劣天氣的影響,如雨、雪、霧等,這些天氣條件會(huì)使圖像變得模糊,增加目標(biāo)檢測(cè)的難度。

2. 毫米波雷達(dá)
毫米波雷達(dá)利用毫米波頻段的電磁波來探測(cè)目標(biāo)的位置、速度和角度等信息。它具有探測(cè)距離遠(yuǎn)、速度快、不受光照和天氣條件影響等優(yōu)點(diǎn),能夠在各種環(huán)境下穩(wěn)定工作。但是,其難以精確識(shí)別目標(biāo)的形狀和大小。對(duì)于一些小目標(biāo)或靜態(tài)目標(biāo),毫米波雷達(dá)的檢測(cè)效果可能不理想。而且,在復(fù)雜場(chǎng)景中容易受到多徑效應(yīng)的干擾,導(dǎo)致測(cè)量誤差增大。
3. 激光雷達(dá)
激光雷達(dá)通過發(fā)射激光束并測(cè)量反射光的時(shí)間來獲取周圍環(huán)境的三維點(diǎn)云數(shù)據(jù),能夠提供高精度的距離和位置信息,構(gòu)建出詳細(xì)的環(huán)境模型。然而,激光雷達(dá)的成本較高而且性能也容易受到惡劣天氣的影響,例如在大霧、暴雨等天氣中,激光束的傳播會(huì)受到阻礙,導(dǎo)致探測(cè)距離縮短和測(cè)量精度下降。
二、紅外熱成像技術(shù)在智能駕駛感知中的獨(dú)特優(yōu)勢(shì)
1. 全天候工作能力
紅外熱成像技術(shù)是基于物體自身發(fā)射的紅外輻射來進(jìn)行成像的,與可見光無關(guān)。因此,它不受光照條件的影響,無論是在白天還是夜晚,都能清晰地探測(cè)到目標(biāo)。在夜間,傳統(tǒng)傳感器如攝像頭往往無法正常工作,而紅外熱成像可以輕松發(fā)現(xiàn)周圍的行人、車輛和其他熱源,為智能駕駛提供可靠的感知信息。即使在惡劣天氣條件下,如雨、雪、霧等,紅外熱成像也能透過這些遮擋物,探測(cè)到目標(biāo)的熱輻射,保障智能駕駛的安全。

2. 強(qiáng)大的目標(biāo)探測(cè)與識(shí)別能力
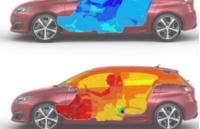
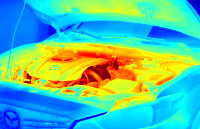
紅外熱成像能夠根據(jù)物體溫度的差異來區(qū)分不同的目標(biāo)。在智能駕駛場(chǎng)景中,行人和車輛等目標(biāo)通常具有較高的溫度,與周圍環(huán)境形成明顯的對(duì)比。這使得紅外熱成像可以快速、準(zhǔn)確地檢測(cè)到這些目標(biāo),即使在復(fù)雜背景下也能有效識(shí)別。此外,紅外熱成像還可以檢測(cè)到一些傳統(tǒng)傳感器難以發(fā)現(xiàn)的隱藏目標(biāo),如埋伏在草叢中的動(dòng)物或障礙物。
3. 抗干擾能力強(qiáng)
紅外熱成像不受電磁干擾等因素的影響。在一些復(fù)雜的電磁環(huán)境中,傳統(tǒng)傳感器如毫米波雷達(dá)可能會(huì)受到干擾,導(dǎo)致測(cè)量誤差增大或無法正常工作。而紅外熱成像依靠物體自身的熱輻射進(jìn)行成像,不會(huì)受到這些外界因素的干擾,能夠提供穩(wěn)定、可靠的感知信息。這使得紅外熱成像在城市峽谷、隧道等復(fù)雜場(chǎng)景中具有獨(dú)特的優(yōu)勢(shì)。
4. 隱蔽性好
紅外熱成像是一種被動(dòng)式探測(cè)技術(shù),它不需要發(fā)射任何信號(hào),因此具有很好的隱蔽性。在一些特殊應(yīng)用場(chǎng)景中,使用紅外熱成像技術(shù)可以在不暴露自身位置的情況下,對(duì)周圍環(huán)境進(jìn)行感知和監(jiān)測(cè),提高車輛的安全性。
三、紅外熱成像與傳統(tǒng)傳感器的融合應(yīng)用
雖然紅外熱成像具有諸多優(yōu)勢(shì),但單一傳感器在智能駕駛感知中往往存在一定的局限性。通過將紅外熱成像的圖像數(shù)據(jù)與攝像頭、毫米波雷達(dá)和激光雷達(dá)等傳感器的數(shù)據(jù)進(jìn)行融合,可以獲得更全面、準(zhǔn)確的環(huán)境信息。例如,將紅外攝像頭與可見光攝像頭的數(shù)據(jù)融合,可以在夜間或低光照環(huán)境下同時(shí)獲得目標(biāo)的熱輻射信息和可見光圖像,提高目標(biāo)識(shí)別的準(zhǔn)確性和可靠性。將紅外熱成像與毫米波雷達(dá)的數(shù)據(jù)融合,可以利用毫米波雷達(dá)的測(cè)距和測(cè)速能力,結(jié)合紅外熱成像的目標(biāo)探測(cè)能力,實(shí)現(xiàn)對(duì)目標(biāo)的更精確跟蹤和定位。
綜上所述,紅外熱成像技術(shù)在智能駕駛感知中具有顯著的優(yōu)勢(shì)。與傳統(tǒng)傳感器相比,它具有全天候工作能力、強(qiáng)大的目標(biāo)探測(cè)與識(shí)別能力、抗干擾能力強(qiáng)和隱蔽性好等特點(diǎn)。雖然目前紅外熱成像技術(shù)在成本、分辨率等方面還存在一定的挑戰(zhàn),但隨著技術(shù)的不斷進(jìn)步和成本的逐漸降低,紅外熱成像有望在智能駕駛領(lǐng)域得到更廣泛的應(yīng)用。同時(shí),將紅外熱成像與傳統(tǒng)傳感器進(jìn)行融合應(yīng)用,可以充分發(fā)揮各自的優(yōu)勢(shì),提高智能駕駛感知系統(tǒng)的整體性能,為智能駕駛的安全、可靠運(yùn)行提供有力保障。因此,紅外熱成像無疑是智能駕駛感知的優(yōu)勝之選,將在未來的智能交通領(lǐng)域發(fā)揮重要作用。
-
傳感器
+關(guān)注
關(guān)注
2577文章
55272瀏覽量
792863 -
智能駕駛
+關(guān)注
關(guān)注
5文章
3022瀏覽量
51334 -
紅外熱成像
+關(guān)注
關(guān)注
3文章
498瀏覽量
16118 -
紅外攝像頭
+關(guān)注
關(guān)注
0文章
17瀏覽量
4286
發(fā)布評(píng)論請(qǐng)先 登錄
尼塞拉熱釋電紅外傳感器:從原理到應(yīng)用,解鎖智能感應(yīng)核心密碼

自動(dòng)駕駛的熱視覺:紅外熱成像賦能夜間安全守護(hù)

看不見的“心臟”:紅外機(jī)芯如何撐起智能設(shè)備的熱感知?

浮思特 | 紅外熱成像技術(shù),正在悄然走進(jìn)汽車座艙
智感江北,創(chuàng)聯(lián)未來 | 華普微榮膺感知領(lǐng)航·企業(yè)成長(zhǎng)組“優(yōu)勝獎(jiǎng)”

ezPyro? TO I2C 熱釋電紅外火焰傳感器:高性能火焰檢測(cè)的理想之選
浮思特 | 洞察不可見的世界,紅外熱成像技術(shù)如何重塑我們的感知

傳統(tǒng)檢漏VS紅外熱成像:一場(chǎng)效率與安全的革命性跨越

紅外熱成像+汽車保養(yǎng):讓故障隱患“無處遁形”
紅外傳感器技術(shù):微測(cè)輻射熱計(jì)解析

基于FPGA制作紅外熱成像傳感器,有沒有大佬可以給我提提意見和思路呀
熱成像賦能機(jī)器人:機(jī)芯的環(huán)境感知新維度
紅外熱成像機(jī)芯:測(cè)溫集成的得力之選
短波紅外成像傳感器有什么突出的優(yōu)點(diǎn)
熱釋電傳感器:以“感知”之名,守護(hù)智慧生活每一刻




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論