 「智科特案例」用VR,我們人類手把手教機器人做事情
「智科特案例」用VR,我們人類手把手教機器人做事情

前言
19年10月的時候,豐田研究院(toyota research institute)發布了一個視頻,其中有一個片段是人類對機器人實行VR示教。

VR機器人示教
眾所周知的是,豐田研究院專注于家庭服務機器人的理論與實際工程驗證,是工程能力和研究能力雙修,有錢有閑的機構之一。我們覺得這個功能挺有意思的,于是也做了一個VR手把手教CasterMoma做事情的案子。
系統構成
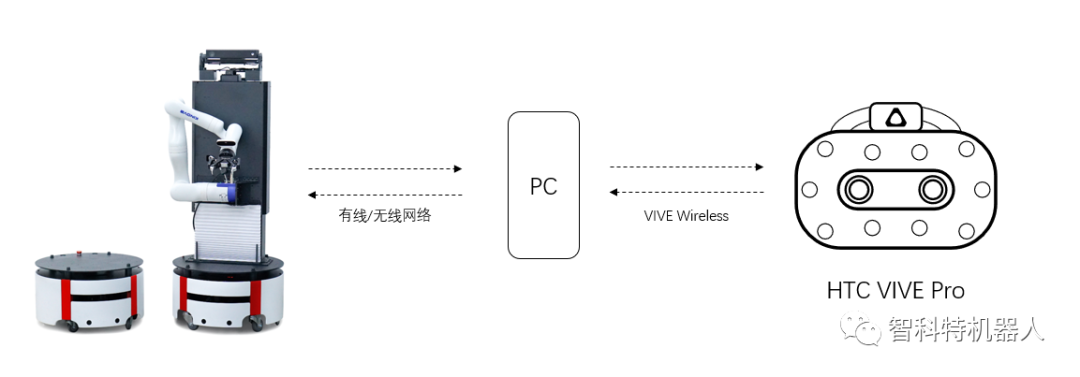
系統主要由一臺移動操作機器人(CasterMoma),一套虛擬現實頭顯(HTC Vive Pro),還有一臺中控電腦構成。
機器人把深度攝像頭的點云圖像數據,與機器人的狀態信息發送到PC上,PC把圖像信息發送到頭顯中顯示。中控電腦接收控制器的指令后,下發控制機器人運動。
主要功能
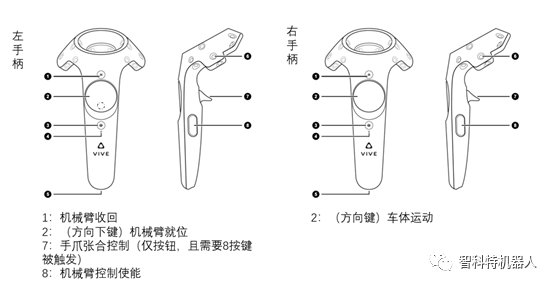
鑒于VR頭顯手柄的按鍵非常豐富,很適合用于控制移動操作機器人這樣類型的,多可控對象的機器人。我們使用左手柄控制機械臂,右手柄控制移動機器人,機器人頭部就用VR頭顯的追蹤功能,跟隨人的頭部運動。
我們在Unity中,也搭建了一套CasterMoma的模型。我們在VR視角中,也能完全看到CasterMoma在我們人的正前方。
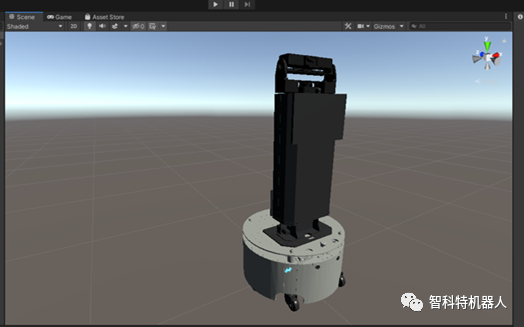
用戶可以通過頭部的運動,控制相機云臺獲取不同角度的視野,同時通過手柄來操控機械臂,以及車體運動。
在日趨復雜的機器人任務中,通過VR遙操作機器人完成任務,一方面可以達到示教的目的,另一方面可以減少執行任務的危險性。這套功能也方便移植到其它的移動操作機器人上。
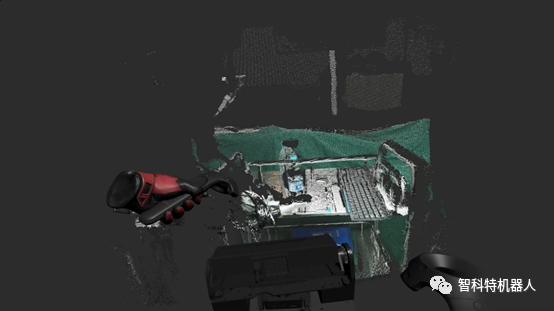
功能演示視頻
以下是我們遙操作機器人進行水瓶抓取的視頻。
謝謝閱讀

北京智科特機器人是一家專業研發、集成、銷售高性能、高穩定性的機器人專業技術公司。我們的愿景是成為國內一流研究型機器人本體科研解決方案服務提供商與機器人在垂直細分領域的落地者和傳播者。通過滿足廣大用戶的多樣性需求,基于用戶的多樣性反饋中研發與迭代產品,讓機器人技術造福更多領域。
-
機器人
+關注
關注
213文章
31079瀏覽量
222275
發布評論請先 登錄
迅為Hi3403開發板極速啟航 | 手把手帶你玩轉核心例程,輕松上手AI視覺!

【迅為RK3568開發板NPU實戰】別再閑置你的NPU!手把手教你玩轉RKNN-Toolkit2 的使用
【RK3568 NPU實戰】別再閑置你的NPU!手把手帶你用迅為資料跑通Android AI檢測Demo,附完整流程與效果

小蘿卜機器人的故事
最新發布!泰科機器人發布首款自研雙足人形機器人

RT-Thread Nano硬核移植指南:手把手實現VGLite圖形驅動適配 | 技術集結

手把手教你如何調優Linux網絡參數
正點原子Linux系列全新視頻教程來啦!手把手教你MP257開發板,讓您輕松入門!
手把手教程:基于RT-Thread在單片機上部署大模型AI終端

KiCad直播活動(三):在 Windows上編譯KiCad 手把手教您編譯/構建 KiCad 源碼

家用才是智能時代機器人巨大的細分場景




 工商網監
工商網監
評論