 迅為Hi3403開發板極速啟航 | 手把手帶你玩轉核心例程,輕松上手AI視覺!
迅為Hi3403開發板極速啟航 | 手把手帶你玩轉核心例程,輕松上手AI視覺!

Hi3403開發板極速啟航 | 手把手帶你玩轉核心例程,輕松上手AI視覺!
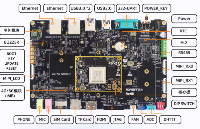
迅為電子9月正式發布基于海思Hi3403處理器的高性能開發板,搭載四核Cortex-A55架構,主頻高達1.4GHz,具備強勁算力、超低功耗與卓越圖像處理能力,適用于智能視覺、工業互聯、AIoT邊緣計算等多種場景,助力開發者快速實現產品智能化升級。
本文將帶你快速了解Hi3403開發板,并通過實戰演示五大核心例程,從攝像頭采集到AI目標跟蹤,一步步帶你輕松上手!

接下來我們將帶你快速了解Hi3403開發板,并演示如何在開發板上運行多個實用例程,助你輕松上手!
例程一
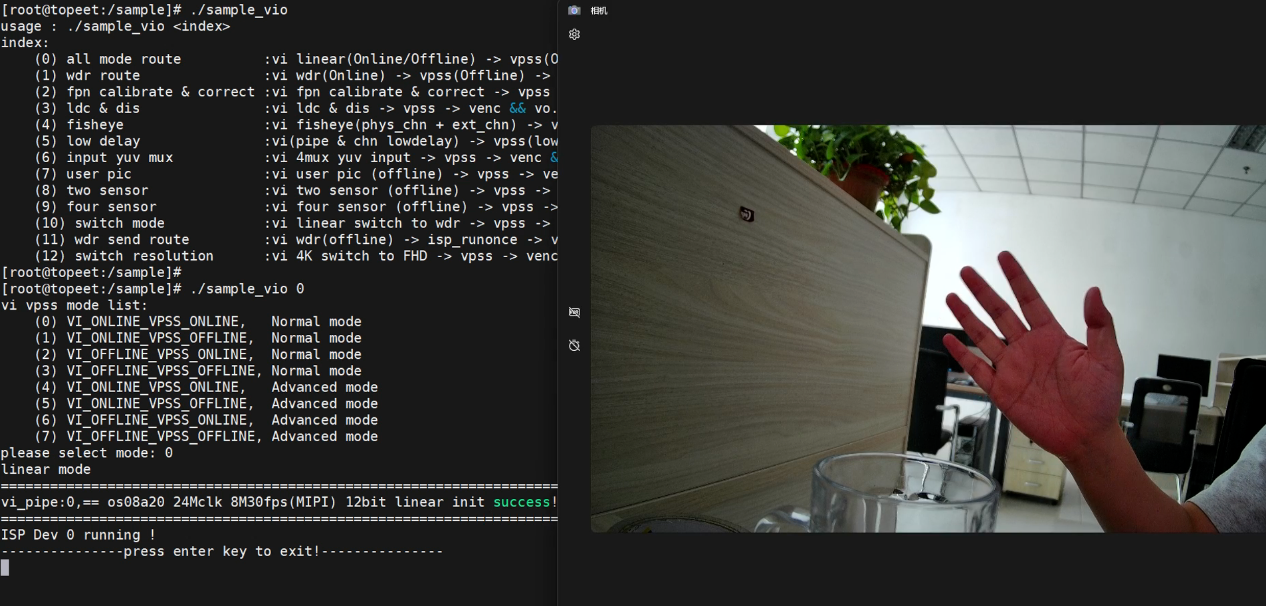
運行./sample_vio 0命令打開單個攝
VIO,全稱是Video Input Output,可以理解為視頻輸入輸出模塊,是控制攝像頭采集和顯示的核心組件。在命令行輸入./sample_vio 0,按下回車,即可看到攝像頭打開,顯示清晰的拍攝畫面。
例程二
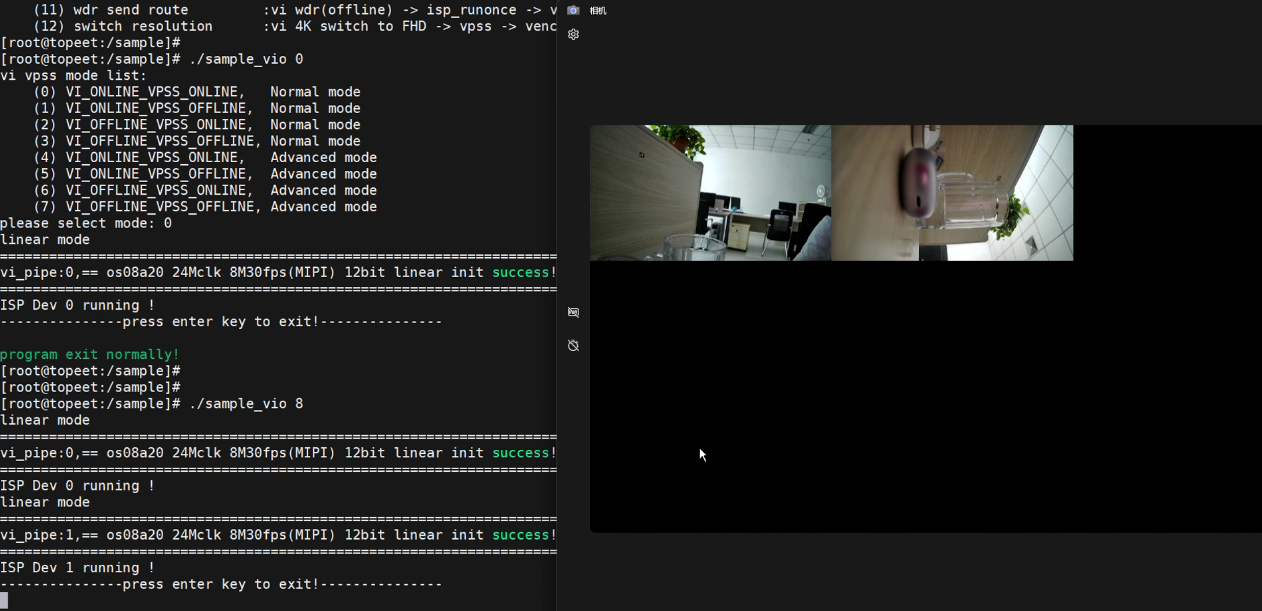
運行sample_vio命令打開兩個攝像頭
輸入./sample_vio 8,指定使用兩個攝像頭,運行sample_vio,可以看到兩個攝像頭拍攝到的畫面同時顯示。
例程三
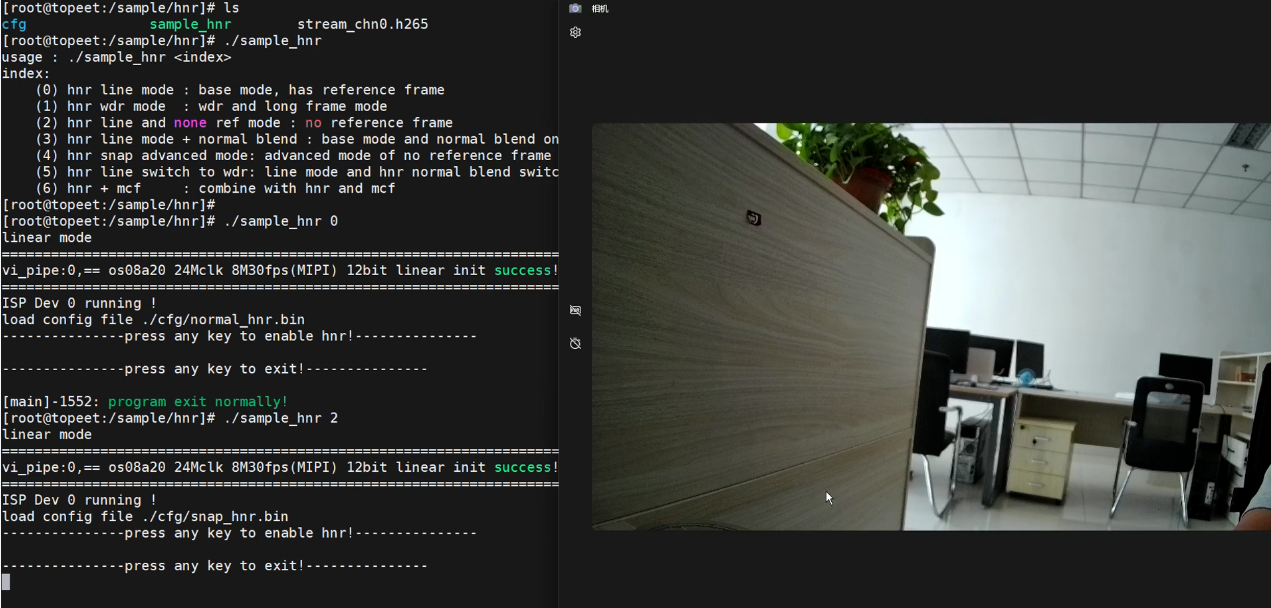
運行sample_hnr命令測試攝像頭HNR功能
HNR,也就是Hardware Noise Reduction,硬件降噪,可以有效減少畫面中的噪點,提升圖像質量。運行sample_hnr命令,我們可以看到開啟HNR后,畫面明顯更加干凈。即使在光線較暗的環境下,也能獲得不錯的圖像效果。
例程四
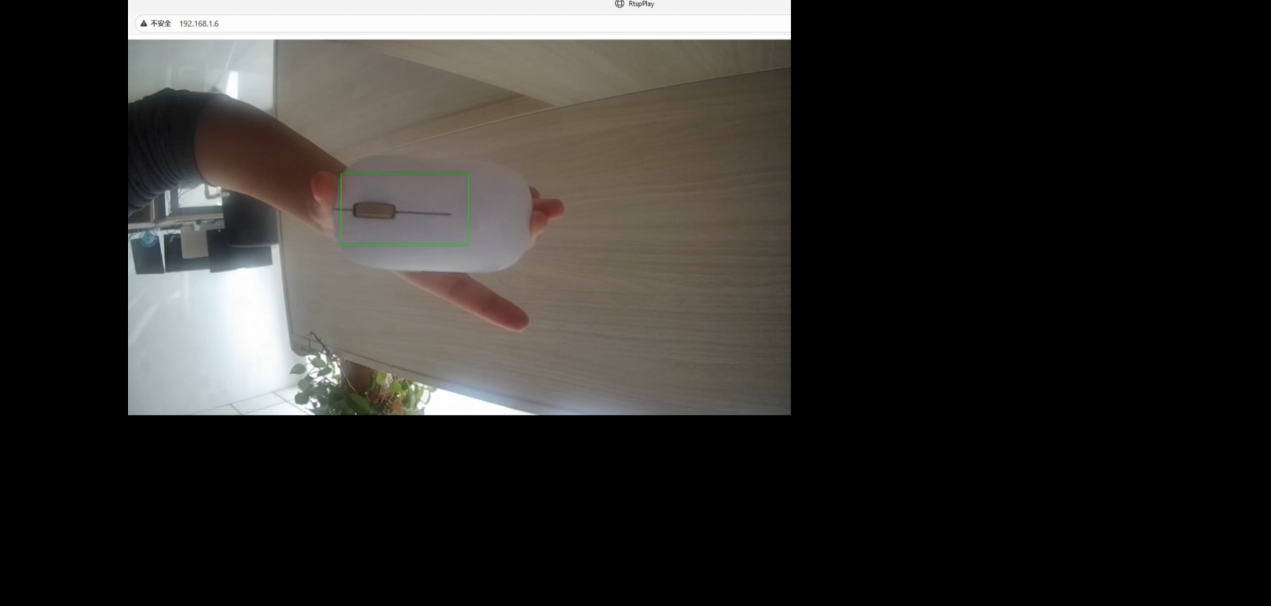
使用yolov8檢測RTSP流
YOLOv8是一種非常流行的目標檢測算法,可以識別圖像或視頻中的物體,比如人、車等等。我們通過RTSP協議,接入攝像頭的視頻流。可以看到,YOLOv8準確地識別出了畫面中的物體,并用方框標記出來。這在智能監控、自動駕駛等領域有廣泛應用。

例程五
使用KCF算法實現目標跟蹤
KCF是一種高效的目標跟蹤算法,可以在視頻中持續跟蹤選定的目標。我們先在畫面中選定一個目標。可以看到,即使目標發生移動或形變,KCF算法也穩定地跟蹤著目標,這在視頻監控、機器人等領域非常有用。
-
攝像頭
+關注
關注
61文章
5049瀏覽量
102259 -
開發板
+關注
關注
25文章
6092瀏覽量
112356 -
AI視覺
+關注
關注
0文章
103瀏覽量
4943 -
迅為電子
+關注
關注
0文章
81瀏覽量
302
發布評論請先 登錄
【先楫HPM5361EVK開發板試用體驗】(原創)5.手把手實戰AI機械臂
正點原子Linux系列全新視頻教程來啦!手把手教你MP257開發板,讓您輕松入門!
手把手教你設計人工智能芯片及系統--(全階設計教程+AI芯片FPGA實現+開發板)
帶你玩轉RT-Thread,開發教程匯總(共13篇)
迅為Hi3403V610開發板海思Cortex-A55架構核心板卡
迅為RK3568開發板?V2.0嵌入式學習開發硬核賦能,開發體驗全面進化

【RK3568 NPU實戰】別再閑置你的NPU!手把手帶你用迅為資料跑通Android AI檢測Demo,附完整流程與效果

【迅為RK3568開發板NPU實戰】別再閑置你的NPU!手把手教你玩轉RKNN-Toolkit2 的使用
重磅升級!迅為iTOP-Hi3403開發板SDK全面升級至Linux?6.6內核





 工商網監
工商網監
評論