") 虹科分享 | 打破汽車動(dòng)態(tài)測(cè)量困局, 虹科OMS光學(xué)傳感器重塑汽車測(cè)試精度標(biāo)桿
虹科分享 | 打破汽車動(dòng)態(tài)測(cè)量困局, 虹科OMS光學(xué)傳感器重塑汽車測(cè)試精度標(biāo)桿

Introduction
在車輛動(dòng)力學(xué)測(cè)試、自動(dòng)駕駛領(lǐng)域,對(duì)物體運(yùn)動(dòng)的測(cè)量,始終追求更高精度、更強(qiáng)實(shí)時(shí)性與更便捷部署。傳統(tǒng)慣性測(cè)量單元(IMU)與衛(wèi)星定位系統(tǒng)(如GPS)的組合雖長(zhǎng)期占據(jù)主流,但其技術(shù)瓶頸已難以滿足前沿科技應(yīng)用對(duì)數(shù)據(jù)精度、可靠性與便捷性的嚴(yán)苛要求。虹科OMS 7光學(xué)傳感器將先進(jìn)光學(xué)感知系統(tǒng)與高精度慣性測(cè)量單元深度融合,帶來(lái)從底層原理到應(yīng)用體驗(yàn)的徹底革新。
01
傳統(tǒng)測(cè)量方案的局限性
慣性測(cè)量單元(IMU)的固有不足
慣性測(cè)量單元(IMU)作為一種推算定位系統(tǒng),通過(guò)對(duì)角速度進(jìn)行積分得到角度,二次積分加速度得到位移和速度。這種計(jì)算方式會(huì)放大傳感器噪聲與零偏,導(dǎo)致測(cè)量結(jié)果隨時(shí)間產(chǎn)生顯著積分漂移。即便高性能IMU,也需頻繁零點(diǎn)校準(zhǔn)或借助外部傳感器校正,無(wú)法獨(dú)立完成長(zhǎng)時(shí)間、高精度的絕對(duì)運(yùn)動(dòng)測(cè)量。
衛(wèi)星定位系統(tǒng)的局限性
相比之下,衛(wèi)星定位系統(tǒng)雖能提供絕對(duì)位置信息以校正IMU漂移,但其信號(hào)易受遮擋與干擾,在隧道、林蔭路、城市峽谷或地下車庫(kù)等關(guān)鍵工況下失效。即便在開(kāi)闊地帶,其更新頻率(通常為10-20Hz)也遠(yuǎn)低于高速動(dòng)態(tài)測(cè)試需求,且精度(即便是RTK技術(shù))在厘米級(jí)徘徊,難以滿足對(duì)制動(dòng)距離、車身微小姿態(tài)變化等參數(shù)的極致測(cè)量需求。
02
虹科OMS 7光學(xué)傳感器:驅(qū)動(dòng)汽車測(cè)試新變革
虹科OMS 7光學(xué)傳感器的核心技術(shù)突破在于將先進(jìn)光學(xué)感知系統(tǒng)與高精度慣性測(cè)量單元(IMU)深度融合。
就動(dòng)態(tài)測(cè)量技術(shù)而言,虹科OMS 7光學(xué)傳感器并非簡(jiǎn)單的迭代升級(jí),而是一次從底層原理到應(yīng)用體驗(yàn)的徹底革新,旨在提供前所未有的“絕對(duì)運(yùn)動(dòng)真相”。
1
光學(xué)之“眼”
傳感器通過(guò)光學(xué)鏡頭直接探測(cè)被測(cè)物體表面,以極高頻率捕捉表面微觀特征變化,避免傳統(tǒng)方式通過(guò)多次積分推算所帶來(lái)的誤差累積。
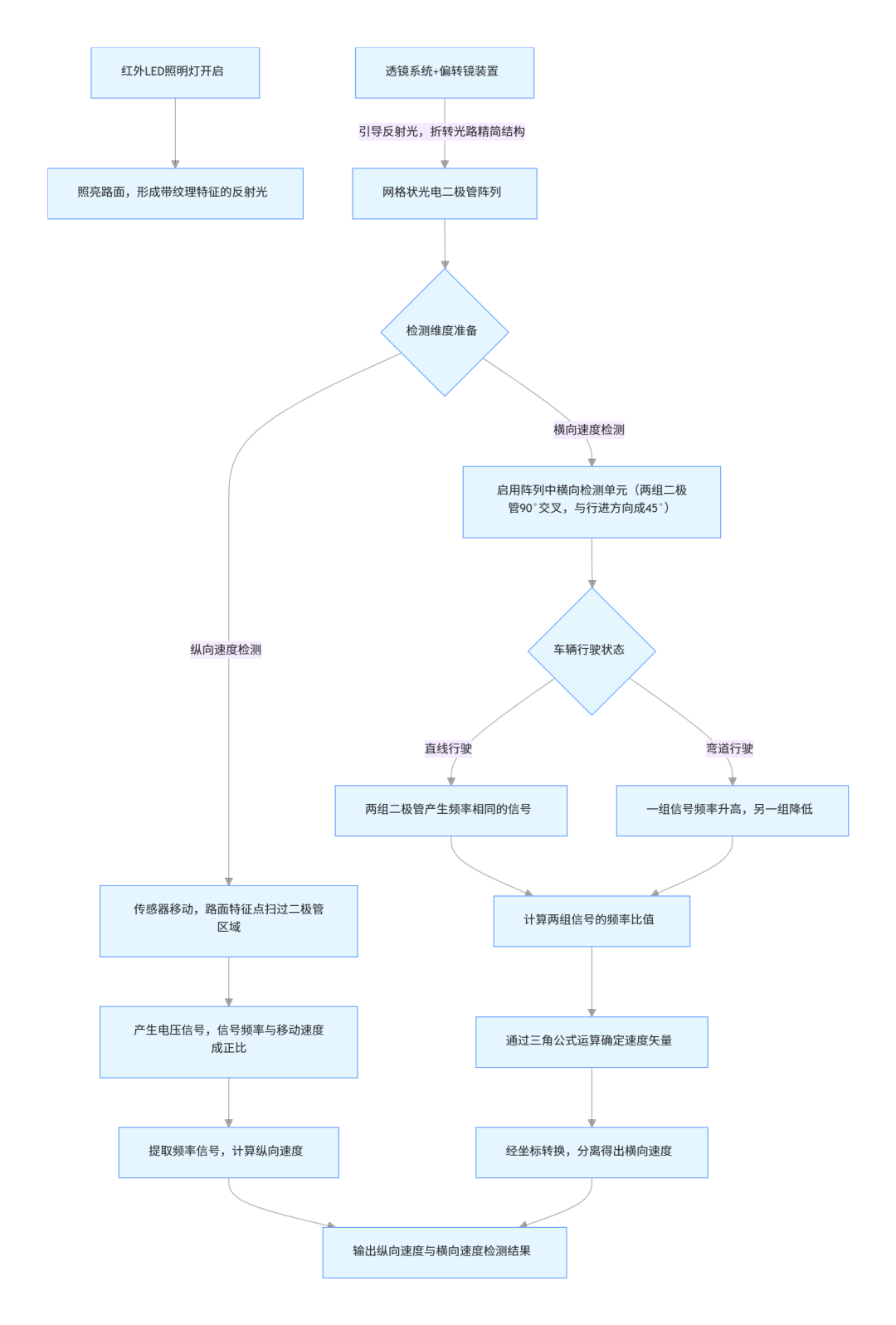
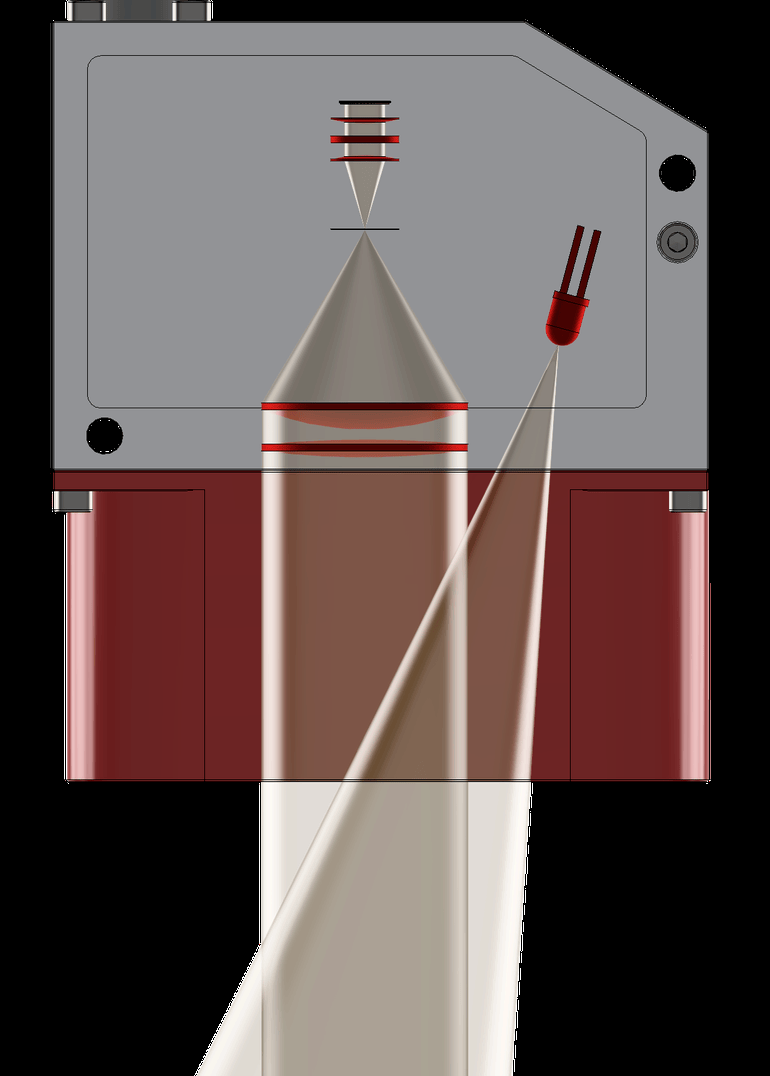
基于成熟的空間濾波法,紅外LED照明燈照亮路面,通過(guò)透鏡系統(tǒng)與偏轉(zhuǎn)鏡裝置,將帶有路面紋理特征的反射光引導(dǎo)至網(wǎng)格狀光電二極管陣列。偏轉(zhuǎn)鏡實(shí)現(xiàn)光路折轉(zhuǎn),使傳感器結(jié)構(gòu)更加緊湊。
傳感器移動(dòng)時(shí),表面結(jié)構(gòu)特征點(diǎn)依次掃過(guò)二極管區(qū)域,產(chǎn)生相應(yīng)電壓信號(hào)。信號(hào)頻率與移動(dòng)速度成正比,可用于速度測(cè)量。
為測(cè)量橫向速度,光電二極管陣列特別增加了橫向檢測(cè)單元,兩組二極管區(qū)域以90°夾角交叉布置,與行進(jìn)方向成45°夾角。
車輛直線行駛時(shí),兩組二極管組產(chǎn)生的信號(hào)頻率相同;車輛沿彎道行駛時(shí),地面結(jié)構(gòu)特征以一定角度穿過(guò)二極管區(qū)域,導(dǎo)致一組頻率升高、另一組頻率降低。
根據(jù)兩組頻率的比值關(guān)系,通過(guò)三角公式運(yùn)算即可確定速度矢量,經(jīng)坐標(biāo)轉(zhuǎn)換后可分別得出縱向與橫向速度。
點(diǎn)擊查看原圖
技術(shù)優(yōu)勢(shì)
1.采用非接觸、無(wú)滑動(dòng)測(cè)量原理
2.可在幾乎所有路面進(jìn)行測(cè)量
3.成熟可靠的認(rèn)證技術(shù)
技術(shù)拓展:光學(xué)測(cè)距方法專業(yè)解析

點(diǎn)擊查看原圖
2
慣性之“核”
虹科OMS 7傳感器內(nèi)置的IMU單元提供了基準(zhǔn)的加速度與角速度數(shù)據(jù)。

點(diǎn)擊了解產(chǎn)品詳情
該傳感器所使用的IMU是一個(gè)完整的慣性系統(tǒng),由一個(gè)三軸陀螺儀和一個(gè)三軸加速度計(jì)組成,采用基于MEMS(微機(jī)電系統(tǒng))技術(shù)的IMU,將微型化的機(jī)械和電子元件集成在一塊微芯片上,尺寸僅為幾毫米,可安裝在傳感器內(nèi)部光學(xué)元件的旁邊。
3
融合之“智”
通過(guò)獨(dú)有的傳感器融合算法,OMS 7將光學(xué)數(shù)據(jù)與慣性數(shù)據(jù)進(jìn)行實(shí)時(shí)、深度的耦合分析,彌補(bǔ)純慣性測(cè)量的漂移問(wèn)題,實(shí)現(xiàn)對(duì)速度、角度等物理量的直接、實(shí)時(shí)測(cè)量。
技術(shù)融合優(yōu)勢(shì)technical strenghth
01
更高精度與可靠性:
虹科OMS 7傳感器利用光學(xué)信號(hào)的長(zhǎng)期穩(wěn)定性彌補(bǔ)了IMU的固有漂移,同時(shí)利用IMU的高動(dòng)態(tài)特性增強(qiáng)了系統(tǒng)的瞬時(shí)響應(yīng)能力,從而形成了一個(gè)兼具高精度與高可靠性的傳感器系統(tǒng),并將整體信號(hào)噪聲降至極低。
02
測(cè)量效率顯著提升:
虹科OMS 7光學(xué)傳感器可直接測(cè)量運(yùn)動(dòng)變量,從根本上避免了傳統(tǒng)積分算法帶來(lái)的誤差累積,因此無(wú)需進(jìn)行耗時(shí)的數(shù)據(jù)后處理與修正,實(shí)現(xiàn)了從數(shù)據(jù)采集到結(jié)果輸出的高效閉環(huán)。
03
多數(shù)據(jù)維度與卓越動(dòng)態(tài)性能:
單個(gè)OMS7傳感器即可實(shí)時(shí)輸出超過(guò)40種車輛運(yùn)動(dòng)狀態(tài)信號(hào),所有這些信號(hào)都可用于精確測(cè)量車輛的運(yùn)動(dòng)狀態(tài),全面覆蓋測(cè)試需求。結(jié)合高達(dá)1 kHz的采樣率,使其能夠精準(zhǔn)捕獲并處理動(dòng)態(tài)換道等極端瞬態(tài)工況下的車輛動(dòng)態(tài)。
04
極強(qiáng)的環(huán)境適應(yīng)性與部署便捷性 :
堅(jiān)固的設(shè)計(jì)保證了傳感器在從極寒到極熱的各種惡劣環(huán)境下均能連續(xù)穩(wěn)定運(yùn)行,還可安裝在車輛的任何位置。同時(shí),單一傳感器的集成化設(shè)計(jì)簡(jiǎn)化了安裝與校準(zhǔn)流程,極大提升了測(cè)試部署的效率和適用范圍。
03
四大卓越優(yōu)勢(shì),重塑測(cè)試體驗(yàn)
極致精度,洞悉微末
虹科OMS 7傳感器的角度測(cè)量精度最高可達(dá)0.1°,關(guān)鍵參數(shù)測(cè)量精度達(dá)到0.1%,適用于車輛底盤(pán)微振動(dòng)分析、機(jī)械臂末端抖動(dòng)監(jiān)測(cè)等精密應(yīng)用。
即裝即用,化繁為簡(jiǎn)
無(wú)需衛(wèi)星信號(hào)、無(wú)需昂貴的校準(zhǔn)實(shí)驗(yàn)室、無(wú)需復(fù)雜的現(xiàn)場(chǎng)標(biāo)定,只需將OMS 7傳感器直接安裝在測(cè)試平臺(tái)上,通電即可開(kāi)始工作,一分鐘內(nèi)輸出可靠數(shù)據(jù),極大提升了測(cè)試效率。
全維數(shù)據(jù),一覽無(wú)遺
單個(gè)傳感器即可構(gòu)建完整的運(yùn)動(dòng)感知模型,無(wú)需整合多個(gè)異構(gòu)傳感器,保證了數(shù)據(jù)在時(shí)間與空間上的絕對(duì)同步性。
智能軟件,輕松配置與集成
通過(guò)網(wǎng)頁(yè)式配置界面,無(wú)需安裝專用軟件,使用瀏覽器即可完成所有參數(shù)配置、實(shí)時(shí)數(shù)據(jù)可視化與測(cè)量任務(wù)管理,實(shí)現(xiàn)輕量級(jí)、跨平臺(tái)的專業(yè)級(jí)測(cè)量體驗(yàn)。
汽車行業(yè)應(yīng)用場(chǎng)景深度解析
賽車性能開(kāi)發(fā):
在F1等頂級(jí)賽事中,通過(guò)直接測(cè)量過(guò)彎時(shí)的橫向加速度與車身姿態(tài)角,為空氣動(dòng)力學(xué)套件和懸架系統(tǒng)優(yōu)化提供關(guān)鍵數(shù)據(jù);其無(wú)漂移的速度測(cè)量能力,為極限制動(dòng)性能評(píng)估和輪胎抓地力分析提供可靠依據(jù)。
整車及零部件測(cè)試:
為乘用車、卡車及特種車輛的制動(dòng)系統(tǒng)、底盤(pán)調(diào)校和電子穩(wěn)定系統(tǒng)標(biāo)定提供基準(zhǔn)數(shù)據(jù),通過(guò)光學(xué)直接測(cè)量實(shí)現(xiàn)不同輪胎、制動(dòng)器配置的客觀性能對(duì)比,有效驗(yàn)證ABS/ESC系統(tǒng)的控制精度。
自動(dòng)駕駛系統(tǒng)驗(yàn)證:
作為“地面真值”傳感器,為自動(dòng)駕駛算法的測(cè)試驗(yàn)證提供高精度運(yùn)動(dòng)基準(zhǔn),通過(guò)同步輸出無(wú)累積誤差的速度、加速度和姿態(tài)數(shù)據(jù),確保感知系統(tǒng)、定位模塊和控制系統(tǒng)評(píng)估的準(zhǔn)確性。
軌道交通認(rèn)證:
在列車制動(dòng)性能測(cè)試中,克服傳統(tǒng)測(cè)量方式的局限性,提供不受車輪空轉(zhuǎn)打滑影響的精確制動(dòng)距離和減速度曲線,為安全認(rèn)證提供權(quán)威數(shù)據(jù)支撐。
檢驗(yàn)認(rèn)證與道路測(cè)繪:
為第三方檢測(cè)機(jī)構(gòu)提供獨(dú)立可靠的運(yùn)動(dòng)測(cè)量基準(zhǔn),確保道路附著系數(shù)測(cè)試、高精度地圖采集等服務(wù)的準(zhǔn)確性與公信力,滿足嚴(yán)格的行業(yè)認(rèn)證要求。
結(jié)語(yǔ)
在汽車測(cè)試和智能駕駛迅速迭代的今天,車輛動(dòng)態(tài)性能的深度挖掘已成為行業(yè)剛需。虹科OMS光學(xué)傳感器,以光學(xué)-IMU深度融合技術(shù)突破傳統(tǒng)測(cè)量瓶頸,為工程師提供超越GPS局限的動(dòng)態(tài)真相。
OMS 7光學(xué)傳感器通過(guò)融合空間濾波光學(xué)測(cè)速與IMU數(shù)據(jù),從根本上解決了傳統(tǒng)慣性測(cè)量的積分漂移和GPS信號(hào)丟失問(wèn)題。它能直接輸出無(wú)累積誤差的多維運(yùn)動(dòng)數(shù)據(jù),為車輛動(dòng)態(tài)測(cè)試、底盤(pán)標(biāo)定和自動(dòng)駕駛驗(yàn)證提供了即裝即用的高精度“地面真值”,極大提升了測(cè)試效率和數(shù)據(jù)可靠性。
本文作者:
虹科技術(shù)工程師 譚錦標(biāo)
-
測(cè)量
+關(guān)注
關(guān)注
10文章
5682瀏覽量
116902 -
光學(xué)傳感器
+關(guān)注
關(guān)注
8文章
238瀏覽量
61770 -
虹科電子
+關(guān)注
關(guān)注
0文章
772瀏覽量
15343
發(fā)布評(píng)論請(qǐng)先 登錄
虹科動(dòng)態(tài) | 2026年1月精彩回顧

虹科動(dòng)態(tài) | KOTRA廣州韓國(guó)貿(mào)易館 韓國(guó)商工會(huì)領(lǐng)導(dǎo)來(lái)訪虹科總部
虹科動(dòng)態(tài) | 2025年12月精彩回顧

虹科車載以太網(wǎng)解決方案:全面賦能智能汽車與無(wú)人駕駛通信
虹科PSI5傳感器編程應(yīng)用:汽車可靠數(shù)據(jù)傳輸?shù)膶?shí)現(xiàn)方案
虹科動(dòng)態(tài) | 2025年11月精彩回顧
虹科動(dòng)態(tài) | 虹科×長(zhǎng)城汽車技術(shù)交流日?qǐng)A滿落幕!
虹科分享 | TC10管理:虹科10BASE-T1S方案高效管控ECU休眠/喚醒
新品發(fā)布 | 車輛矢量測(cè)試難?虹科WVS系統(tǒng)來(lái)破局
虹科動(dòng)態(tài) | 2025年10月精彩回顧
打破汽車動(dòng)態(tài)測(cè)量困局, 虹科OMS光學(xué)傳感器重塑汽車測(cè)試精度標(biāo)桿
虹科案例 | 為什么汽車零部件頭部企業(yè),選擇虹科方案做方向盤(pán)EOL測(cè)試?
虹科動(dòng)態(tài) | 2025年9月精彩回顧
虹科動(dòng)態(tài) | 2025年8月精彩回顧



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論