 要不要安裝360全景導航?
要不要安裝360全景導航?

很多人來說,車是屬于代步的工具。日常行車中,一些必要的行車裝備是必要的,如很多車主都會加裝導航、360°全景、行車記錄儀等汽車電子產品。對于普通倒車后視,大家很清楚其作用,但是360度全景很多車主未必非常清楚其價值和使用范圍。
1、A柱盲區
A柱盲區是指行駛過程中的視野盲區。一般轎車車身每側有三個立柱,其中前擋風玻璃兩側的斜柱被稱為A柱。每當汽車在轉彎或者進入彎道前駕駛者的視野都會被A柱部分遮擋,造成一個視野上的盲區。
2、內輪差盲區
拐彎時,前內輪轉彎半徑與后內輪轉彎半徑之差,形成盲區。內輪差,在轉彎時極易引發交通的原因之一。由于內輪差的存在,車輛轉彎時,前、后車輪的運動軌跡不重合。
3、泊車盲區
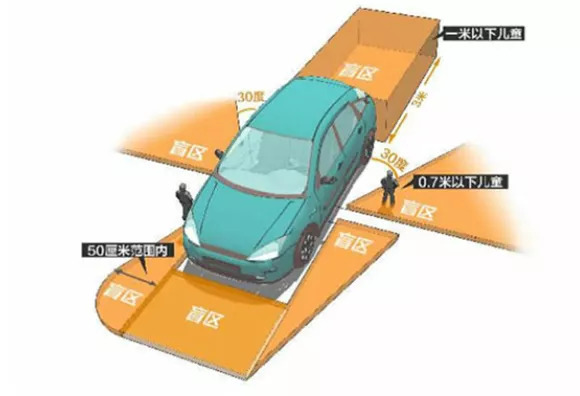
由于車的后方視線也是“先天不足”,車輛在倒車、泊車時,由于兩邊緊挨著其他車,有的車后窗貼上太陽膜透視性差,座位較高,后視盲區大,在停車或倒車時常常在泊車時造成刮傷、碰撞。因為倒車、泊車造成的事故每年都有很多,造成經濟損失是小,更有人因此喪命。
4、后視鏡盲區

當轉彎角度大時,從后視鏡會看不清轉彎過去車道上的車輛。如果后面車輛突然消失,可能已經進入盲點。后視鏡并不能完全地收集到車身周圍的全部信息,因為后視鏡的視覺區之間都存在著或多或少的盲區。尤其從輔路上主路,從左后視鏡沒看到車輛,假如加速大角度切上最內側車道,是很容易與正在最內側車道狂飆的車輛發生碰撞。
5、停車錄像功能
開車外出時,在路邊停車、泊車,不小心被別人刮傷、碰瓷了,怎么辦?行車過程遇到碰瓷是忍氣吞聲,借錢消災,還是用正義和法律維護自己的合法權利,將碰瓷者繩之以法。可是沒有證據什么辦?
以上的種種問題,360°全景導航都能幫你解決!
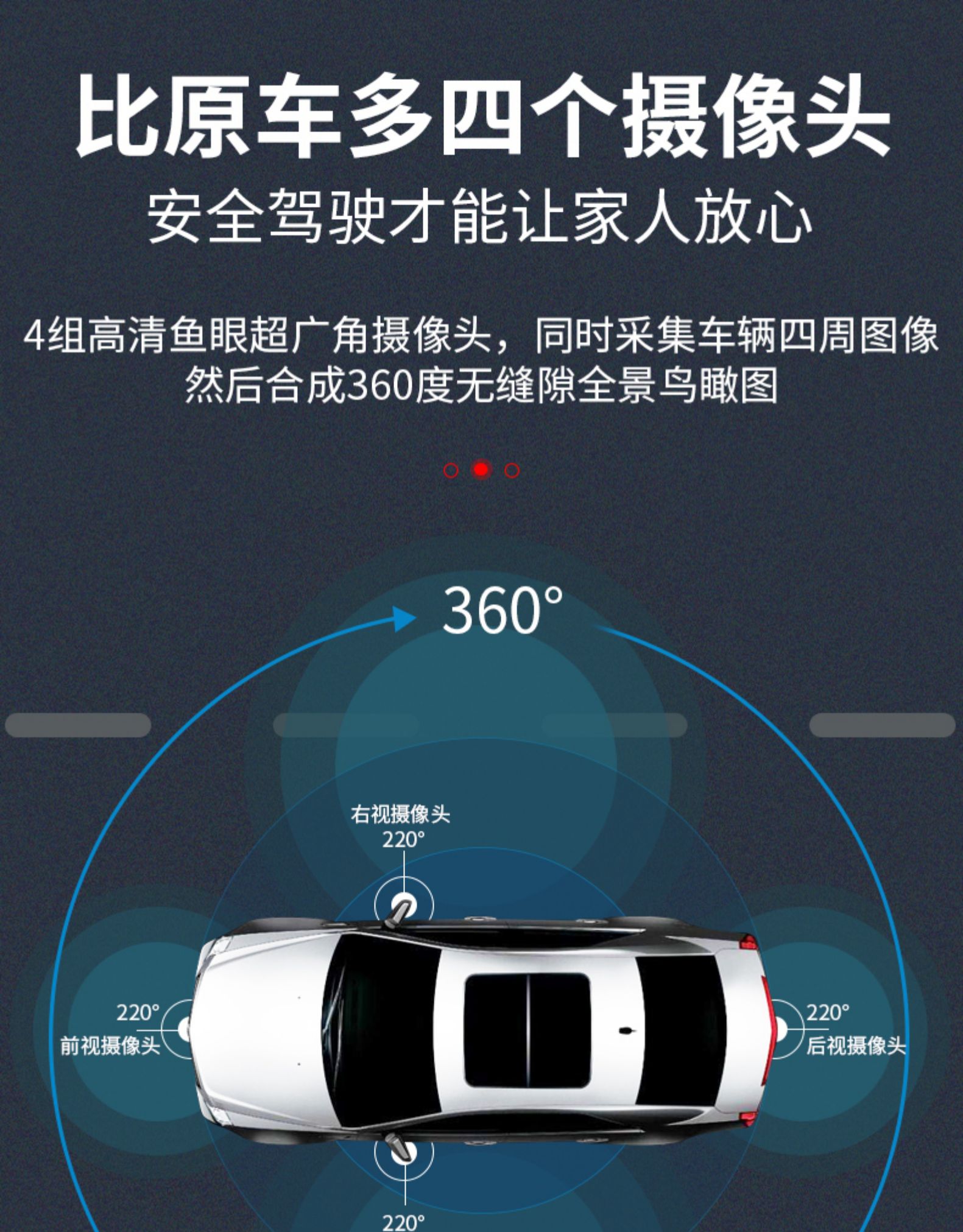
全景導航,通過安裝在車身前后左右的4個超廣角高清攝像頭,同時采集車輛四周的影像,經過圖像處理單元矯正和拼接后,形成一幅完整無縫拼接360°全景鳥瞰圖,實時傳送到中控臺的顯示設備上。
有了這樣的神助攻之后,車主倒車或者行駛在狹小的區域內,除了直覺之外,還可以通過觀察導航屏幕的360度全景影像來做出正確的判斷,車身周圍的所有視野盲區全部可以看見,避免意外的發生。有助于幫助我們行車更加安全。
-
360
+關注
關注
1文章
417瀏覽量
30869
發布評論請先 登錄
2026年,如何快速找到適合你企業的AI+MES切入點?
探索PSE - 360:緊湊型面板安裝霍爾效應旋轉傳感器的魅力
MonoDream框架賦能機器人僅憑單目相機重構全景與未來

為什么360°鏡頭容易“踩坑”?

關于DC電路板的GND要不要接金屬外殼的問題,以下那個是對的?
12 路 1080P 滿負載!米爾 RK3576 補全車載 360° 全景影像視野
中小企業要不要上設備管理系統?3 個問題幫你判斷

什么是室內定位導航技術
HGUIDE O360慣性/GNSS導航儀@霍尼韋爾




 工商網監
工商網監
評論