 【璟豐機電】伺服執行元件具體構成以及相應分類
【璟豐機電】伺服執行元件具體構成以及相應分類

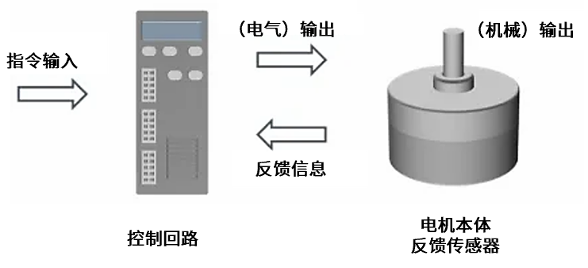
對于一些經驗豐富的人士,在對伺服執行元件進行使用的時候,都會明確伺服執行元件構成,之后再進行相關操作。因為只有這樣,才能確保整體使用效果。比較環節就是通過獲得的指令信號對比系統反饋的信號,這樣就能獲得信號的偏差。通常情況下,是由專門的電路和計算機來實現。另外就是控制器,相應的組成部分包括了比例、積分等,主要的任務在于,對元件輸出偏差信號變化處理,達到控制執行元件的目的。
 日本哈默納科harmonic執行元件
日本哈默納科harmonic執行元件而伺服執行元件還有執行環節,該環節的主要作用在于,控制信號的要求,可以將輸入的各種形式能量,轉換成機械能。而通過驅動控制對象工作,進而可以實現機電一體化的功能。同時還有被控對象,主要包括了控制的機構或裝置,主要的作用在于,直接完成系統的目的主體。通常情況下,主要包括了傳統系統、執行裝置等組成。而被控對象,主要是指機械參數,包括了具體的位移、速度等。
同時還應該要明確具體的檢測環節,主要是指對輸出進行測量和轉換成比例環節所需的裝置,通常情況下,主要包括了傳感器和轉換電路等。在整個系統當中,每一個環節都不是獨立的,相互之間存在一定的協作關系,這樣原件才能正常的工作的。
另外在對元件使用的時候,不僅要明確伺服執行元件構成,同樣還要明確具體的分類。按照被控量的不同,可以分為位移、速度等系統。另外其他系統,還包括了相應的溫度,具體的濕度等各種參數。按照驅動元件類型進行分類,可以分為電氣伺服系統、氣動伺服系統等。
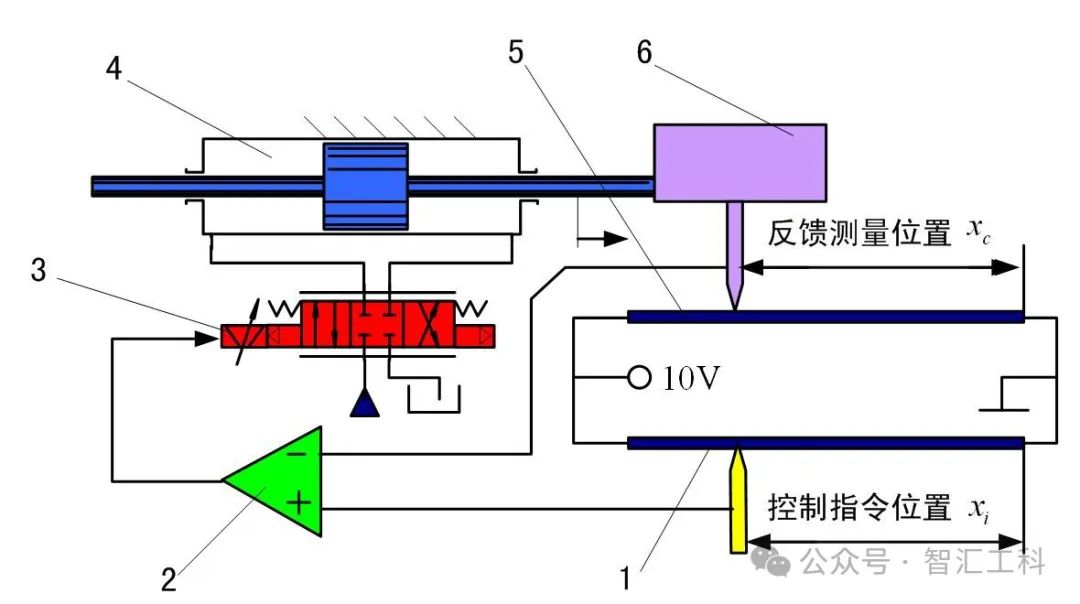
同時在對伺服執行元件分類的時候,還應該要根據具體的控制原理分類。可以將伺服系統分為開環、閉環和半閉環等系統。同時在使用的過程當中,還安裝有位移檢測裝置,在進行檢測的時候,相關位置數據,能夠及時反饋,進而確保測量數據的準確性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
發布評論請先 登錄
相關推薦
熱點推薦
提高步進伺服系統精度的措施
步進伺服系統作為現代工業自動化領域中的重要執行元件,其精度直接影響設備加工質量與生產效率。隨著智能制造對運動控制要求的不斷提高,如何提升步進伺服系統的精度成為工程師關注的核心問題。本文

機電液一體化集成創新:現代液壓伺服電液執行器的原理、架構與設計范式演進
在全球工業自動化與智能化浪潮的推動下,作為高端機電液一體化核心部件的液壓伺服電液執行器,正迎來市場規模與技術革新的雙重擴張。根據行業研究報告,全球伺服液壓

為什么選擇原裝陶氏A系列大速比減速機?璟豐講述五大核心優勢
動力之源,正是原裝進口的陶氏(DODGE)A系列大速比減速單元。為何璟豐堅持采用原裝陶氏A系列?其背后究竟蘊含著怎樣的產品哲學與核心價值?今天,我們將通過璟豐的視角,為您揭示其五大核心
伺服基礎知識詳解
。 一、伺服系統的定義與分類 伺服(Servo)一詞源于拉丁語"servus"(奴隸),意指系統能像仆人一樣精確執行指令。伺服系統是"使物體

交流伺服電機及其調速分類和特點
交流伺服電機作為現代工業自動化領域的核心驅動元件,憑借其高精度、快速響應和穩定運行的特點,已成為數控機床、機器人、精密儀器等高端裝備的關鍵部件。其技術發展與應用實踐呈現出鮮明的時代特征,本文將從

伺服電機的控制方式簡述
伺服電機作為自動化控制系統的核心執行元件,其控制方式直接決定了設備的動態響應、定位精度和運行效率。隨著工業4.0和智能制造的發展,伺服控制技術已從傳統的模擬量控制演變為數字化、網絡化的

eVTOL艙內噪聲響應分析的仿真流程
上一節中介紹了eVTOL旋翼噪聲的表征以及通過聲學BEM模型分析旋翼噪聲到eVTOL機體外表面的噪聲傳播分析流程,本節將在上節內容的基礎上繼續介紹eVTOL艙內噪聲響應分析的仿真流程,同時根據貢獻

伺服電機的三種制動方式有什么區別?
伺服電機作為自動化控制系統中執行元件的核心部件,其制動性能直接影響設備的定位精度和安全可靠性。目前主流的伺服電機制動方式包括動態制動、再生制動和電磁機械制動三種,它們在制動原理、應用場

步科伺服驅動器通過CCLinkIE轉CANopen網關的標準化控制網絡接入
CCLink一側,需對IP地址以及邏輯占用數量進行設置,且應確保這些設置與三菱PLC的相應設置保持一致。導入從站伺服的電子數據單(EDS)文件。

溫度傳感器元件的分類及選型指南
溫度傳感器元件的分類及選型需要綜合考慮測量原理、溫度范圍、精度、響應時間、環境適應性、成本等因素。以下是詳細的分類及選型指南:1.接觸式溫度傳感器(需與被測物體直接接觸)熱電偶

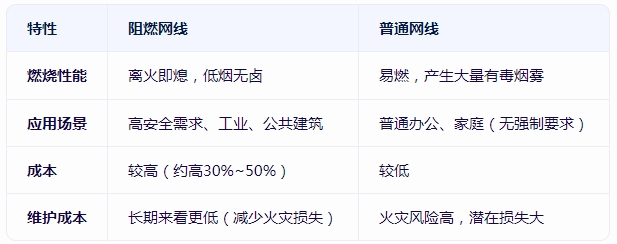
網線阻燃特性有哪些具體應用場景分類
網線阻燃特性通過延緩燃燒、減少有毒氣體釋放等特性,顯著提升了網絡布線的安全性,尤其適用于對消防要求嚴格或存在火災隱患的場景。以下是其具體應用場景的詳細分類與分析: 一、高安全需求場所 公共建筑 機場
EtherCAT轉CANopen網關與伺服器在匯川組態軟件上的配置步驟
。具體操作步驟如下: 開啟匯川 PLC 編程軟件,在軟件的文件功能板塊里查找設立新工程的操作途徑,為新工程賦予名稱并挑選合適的 PLC 型號。 在右側工具箱中執行右鍵點擊操作,選擇“EtherCAT Devices”后導入XML文件。隨后,選定

CPU的各種指令和執行流程
、數據傳輸等功能。要深入理解CPU的指令,我們需要從多個維度進行分析,尤其是指令的構成、分類、執行流程以及與不同架構的關系。
液壓伺服系統工作原理液及優缺點
液壓伺服系統是一種通過調節液壓元件的流量和壓力來實現對負載的位置、速度和力的精確控制的系統。以下是對其工作原理及優缺點的詳細分析: 一、工作原理 液壓伺服系統的工作原理主要分為兩個階段:感應階段



 工商網監
工商網監
評論