 控制器軟件之速度控制功能設計
控制器軟件之速度控制功能設計

速度控制和扭矩控制一樣,是車輛控制的必須功能,如駐波時就需要進行速度控制,其設計需滿足下面幾點:
- 軟件應該在10ms周期需求扭矩計算信號整合功能,輸入信號為驅動模式、需求扭矩、轉速、外部速度環的kpki,扭矩ramp,扭矩最大值和最小值,輸出信號為:轉速差值、Kp、Ki值,Pi積分限幅值、前饋扭矩值、扭矩Ramp、需求扭矩的上下限值。
- 能根據模式請求是否為自標定模式切換需求扭矩及扭矩Ramp值,當模式請求為自標定時,使用狀態機給定的自標定扭矩及扭矩Ramp;反之,則使用CAN上的需求扭矩和扭矩Ramp值。
- 能根據模式請求是否為外部速度環切換速度環時的Kp值;若為外部速度環模式,則使用外部速度環的Kp值,反之使用內部Kp值;Kp、Ki值可以通過轉速差值查表獲得。
- 能根據模式請求進行模式切換,若需求為扭矩環時,輸出前饋扭矩為需求扭矩值,其他用以PI計算的值全為0;若需求模式為速度環時,輸出前饋扭矩為需求扭矩,PI計算參數為查表獲取的Kp、Ki值,以及設定的積分限幅值;若需求模式為其他模式,則輸出的所有PI參數為0且前饋扭矩為0。
- 軟件應該在10ms周期加入需求扭矩計算功能,輸入信號為轉速差值、速度環Kp、Ki值、積分限幅值、前饋扭矩值,輸出不加damping不加Ramp的扭矩需求值。
- 該模塊應能通過增量式PI的模式計算轉速控制的需求扭矩,并通過積分限幅值對積分進行限幅。
1 功能描述
1.1 信號整合模塊
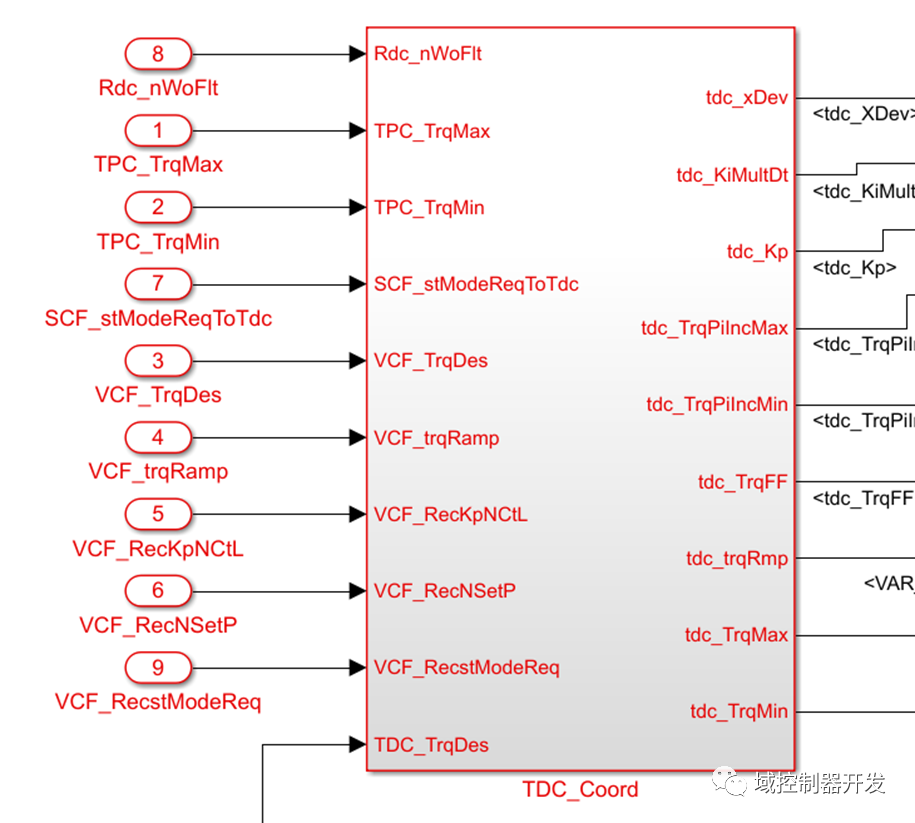
圖1.信號整合
該模塊內主要分兩個子系統,第一部分主要是對輸入信號進行前處理:
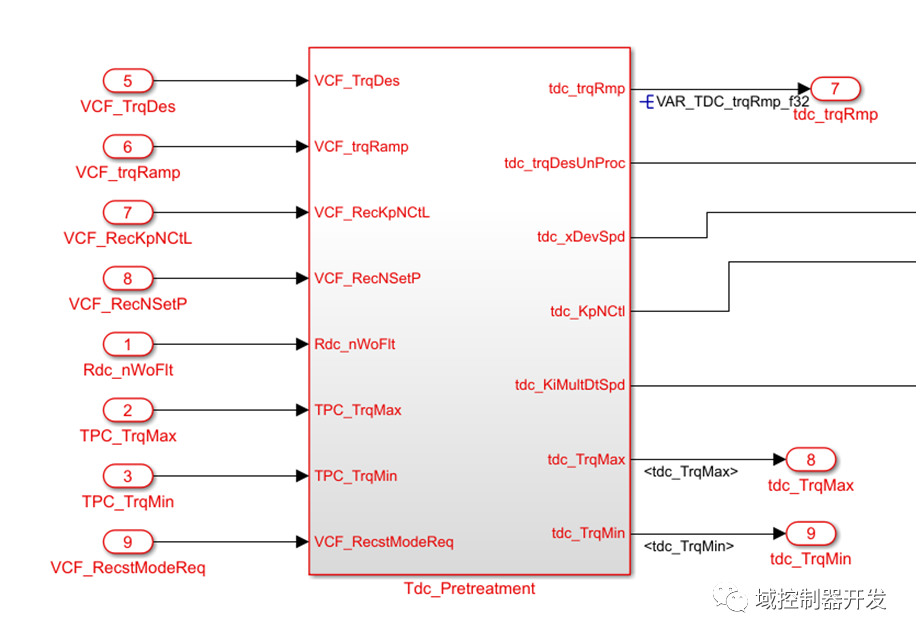
圖2.信號前處理
第二部分是根據當前模式選擇參數,模型框架如下圖:
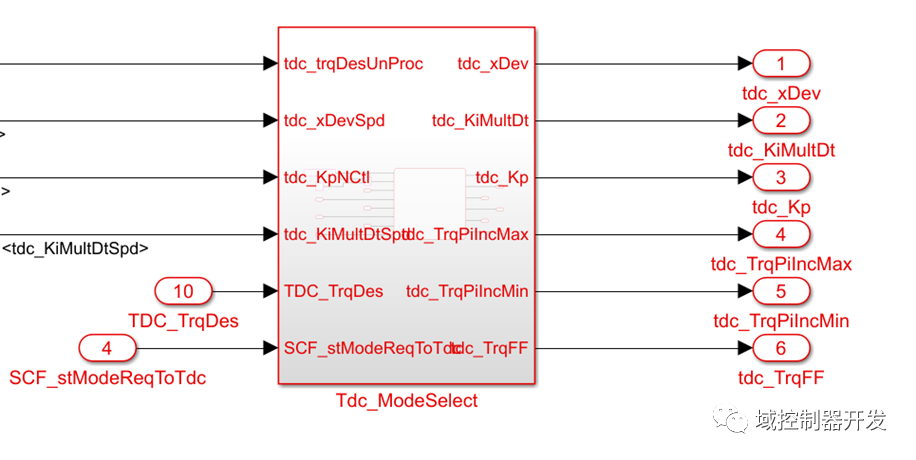
圖3.參數選擇模塊
第一部分內部邏輯如下所示模型框圖:
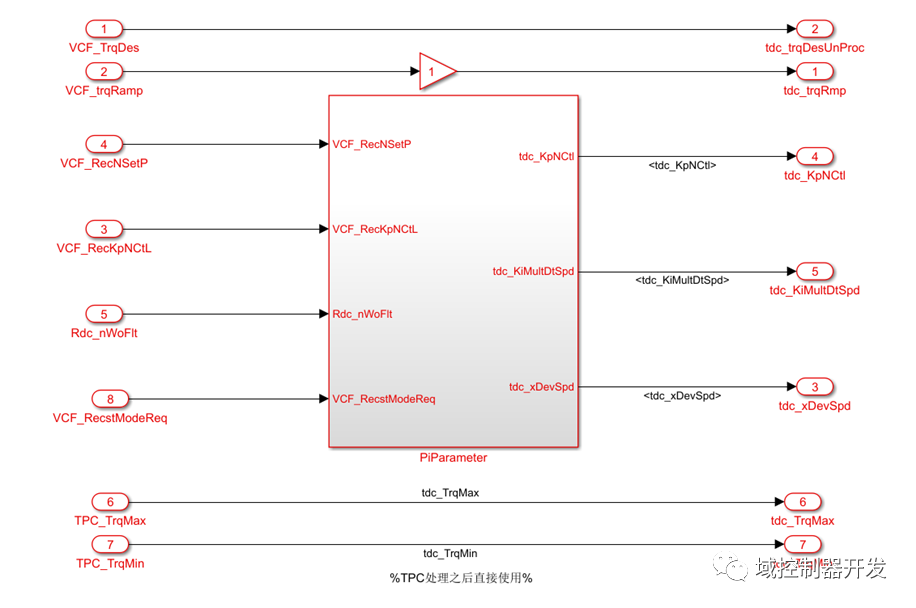
圖4.信號前處理內部
從上圖可知:
該子系統主要是PI參數選擇模塊,如下:
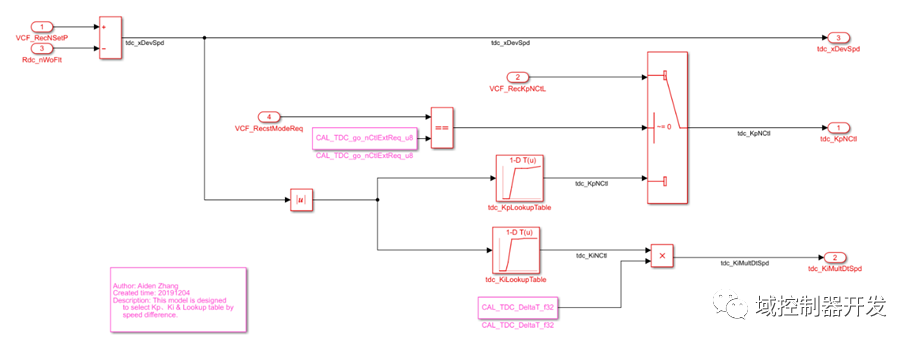
圖5.參數選擇內部結構
對于PI參數選擇模塊則為通過當前驅動控制模式請求是不是為外部速度環,若為外部速度環則使用外部的Kp值,當使用外部Kp值時,需通過需求轉速與實際轉速的差值tdc_xDevSpd判斷使用快速的Kp值CSD_RecKpHighNCtL還是慢速的Kp值CSD_RecKpLowNCtL,當轉速差值絕對值大于3000時,使用快速Kp值,反之,使用慢速Kp值;若為內部速度環則直接使用內部查表的Kp、Ki值,其中Kp、Ki通過轉速差值查表得到。
1.2 速度環需求扭矩計算
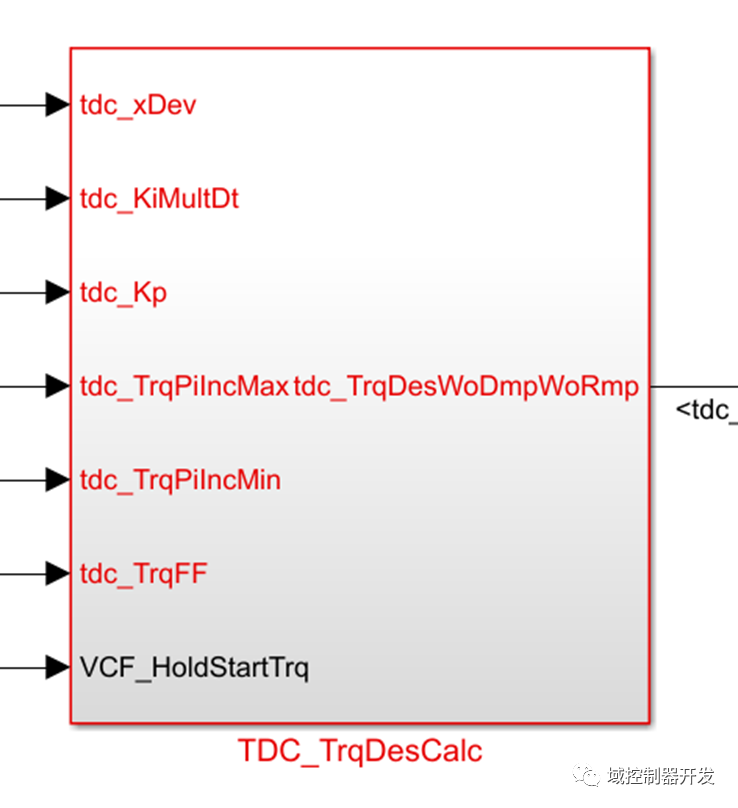
圖6.需求扭矩PI計算模塊
該模塊主要是是用以計算速度環時的需求扭矩,該PI為增量式PI,通過增量式PI計算轉速環時的扭矩,并對積分扭矩進行積分限幅防止積分飽和,其中前饋扭矩可以在模式切換時防止扭矩跳變,起到扭矩平滑過渡的目的。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN總線
+關注
關注
145文章
2043瀏覽量
135215 -
狀態機
+關注
關注
2文章
499瀏覽量
29141 -
CSD
+關注
關注
0文章
91瀏覽量
13495 -
速度控制
+關注
關注
0文章
38瀏覽量
8265
發布評論請先 登錄
相關推薦
熱點推薦
BACnet控制器有什么功能?
描述BACnet協議的體系結構,分析BACnet控制器的功能,論證基于嵌入式Linux開發BACnet控制器的可行性;給出BACnet控制器軟件
發表于 09-20 08:07
基于嵌入式Linux 的BACnet 控制器軟件設計
描述BACnet協議的體系結構,分析BACnet控制器的功能,論證基于嵌入式Linux開發BACnet控制器的可行性; 給出BACnet 控制器軟件
發表于 05-15 14:55
?28次下載
基于微控制器的多功能電動機保護裝置實現
開發了一種基于微控制器的多功能 電動機保護 裝置。在接觸器線圈控制電壓優化設計和電子式熱繼電器保護功能設計的基礎上,將兩種
發表于 08-09 17:19
?45次下載
嵌入式運動控制器設計
uC/OS-Ⅱ。詳述了控制器的功能設計、硬件設計和軟件設計流程。截至目前,運動控制器硬件平臺搭建均已完成,并進行了通信實驗和基于SCARA機器人平臺的
發表于 02-08 17:22
?2次下載
控制器的功能
本視頻主要介紹了控制器的功能,分別有數據緩沖、差錯控制、數據交換、狀態說明、接收和識別命令、地址識別,其次介紹了DMA控制器基本功能,最后介
伺服控制器速度開環和速度閉環區別
隨著公司低壓直流伺服電機控制器的銷量增加,客戶反饋伺服控制器速度開環和速度閉環區別不是很明白,現對客戶反饋的速度閉環問題匯總整理及解決方案如
發表于 09-08 09:16
?3206次閱讀

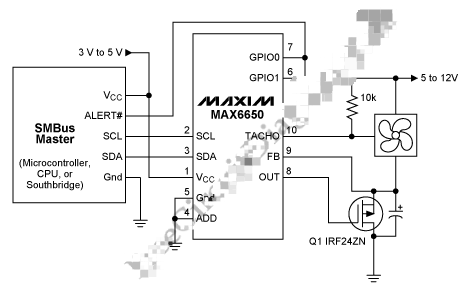
風扇速度控制器電路圖分享
風扇速度控制器是一種電子設備,用于調節風扇的轉速。通過改變輸入電壓或電流,風扇速度控制器可以控制風扇電動機的功率,從而調節風扇的轉速。



 工商網監
工商網監
評論