 弱圖重計算感知,智駕系統摒棄高精地圖會是大勢所趨嗎?
弱圖重計算感知,智駕系統摒棄高精地圖會是大勢所趨嗎?

電子發燒友網報道(文/周凱揚)智能駕駛系統作為現在各新車型上的最大賣點之一,已經吸引了不少廠商加入研發行列中,其中不乏初創企業、大廠甚至是車企自己。然而考慮到智能駕駛研發門檻極高、投入巨大,且在高安全性上的實現往往不是一年半載就能達成的,所以對于不愿投入智駕開發無底洞又想提高競爭力的車企,尤其是部分新勢力來說,第三方方案或許是最好的出路。
反觀提供第三方智能駕駛系統解決方案的廠商,如何與車企達成合作,做好定制化,才是痛點所在。一把攬過所有活是不現實的,傳感器、處理器、地圖、操作系統以及算法不可能全部自研,所以從中選取一部分,提供一個平臺化的方案是最穩妥的方案。
諸如百度、華為、元戎啟行等廠商,都采用了這套方案,但他們在細節與商用進度上還是有所不同,正巧在上海車展前后,幾家廠商也都公布了其智駕系統全新的情報。值得一提的是,這幾家似乎都對高精地圖呈現出了不盡相同的態度,我們不妨放在一起對比一下。
華為ADS 2.0:逐步拋棄高精地圖,擴大覆蓋城市
車展前夕,華為公布了他們的下一代智駕系統方案ADS 2.0,并著重強調了他們的城區智駕領航輔助功能。華為將從今年開始推動這一功能在全國各大城市的落地,首先是上海、深圳、廣州、杭州和重慶五大城市,但該階段仍需要高精度地圖。在自學習訓練的進程再獲突破后,華為預計于Q3推出無需高精地圖的版本,并把覆蓋城市擴大到15個,最終于今年Q4覆蓋到45個城市。
至于此次ADS 2.0的硬件平臺,據了解問界M5智駕版用到了華為的MDC610計算平臺,算力高達200TOPS。從后續支持極狐阿爾法S全新Hi版和阿維塔11全系列等機型上來看,ADS 2.0的硬件平臺都是從MDC610起步了。再看問界 M5智駕版的配置清單,我們還可以了解其該車型上的傳感器數量配置,對ADS 2.0的傳感器融合能力有個大致了解。

問界M5智駕版 / 賽力斯
問界M5智駕版無論是后驅還是四驅版,其傳感器配置都一樣,包括一個激光雷達、3個毫米波雷達、12個超聲波雷達、7個高感知攝像頭和4個全景鏡頭。靠著整套ADS 2.0加成的智駕系統,問界M5智駕版實現了智能駕駛輔助主動安全、輔助泊車與輔助巡航和哨兵模式等功能。
不難看出,在華為的這套方案中要想真正拋棄高精地圖,包含計算平臺、傳感器平臺在內的硬件實力要求也不能低。要想真正推動無高精地圖化,還是得將整體成本打下來,畢竟搭載高階智駕系統的低價車型,才會是未來的市場主力軍。
元戎啟行:不依賴高精地圖,更高的成本競爭力
在上個月,L4級自動駕駛解決方案的提供商元戎啟行也推出了他們的全新智駕方案DeepRoute-Driver 3.0。要知道,此前元戎啟行就推出過量產成本不到2萬元的智駕前裝方案,不過此前的智駕方案主要是面向Robotaxi運營這一場景來打造的,并沒有針對民用推出對應版本。這次發布的DeepRoute-Driver 3.0進一步壓低了成本,元戎啟行基于該架構推出了兩款行泊一體的新品,D-PRO和D-AIR,兩者均不依賴高精地圖,僅靠導航地圖就能實現高階智駕。
據其描述,即使在沒有高精地圖的前提下,Driver 3.0依然可以感知到其涵蓋的精確道路信息,比如車道線、信號燈、路標等等,同時實時定位車輛位置、所在車道以及與車道線之間的距離。
其中D-PRO的硬件成本控制在了1.4萬元人民幣,搭載7顆攝像頭和1個激光雷達,以及算力達200TOPS以上的計算平臺。D-PRO可實現在導航地圖下的全域點到點智駕、自主決策規劃和VPA高階記憶泊車。從其官方發布的合作新聞來看,D-PRO搭載的計算平臺應該就是基于英偉達的Drive Orin SoC了。
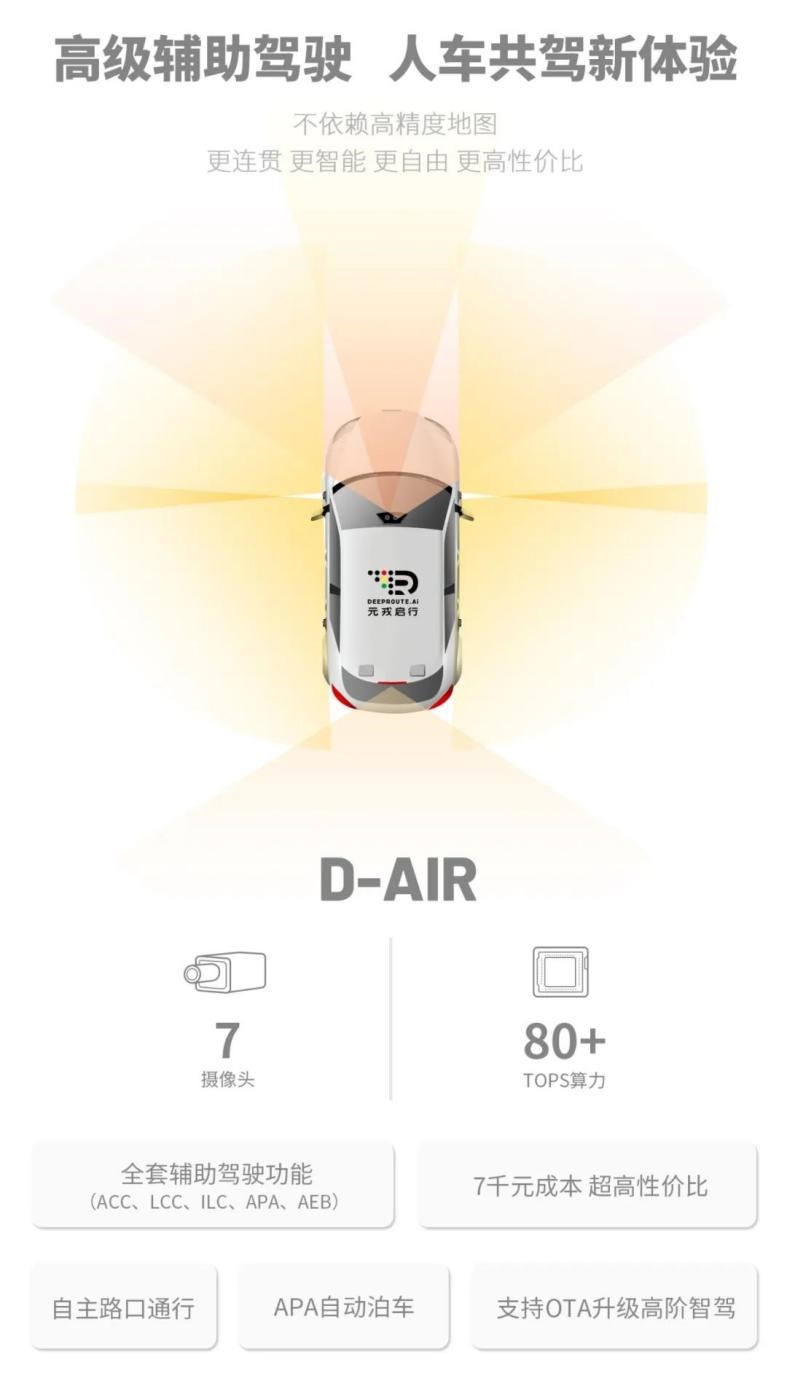
D-AIR智能駕駛 / 元戎啟行
而D-AIR則直接把硬件成本控制在了7千元,僅靠7顆攝像頭的純視覺感知和80TOPS以上的計算平臺,就能完成ACC、LCC、APA等一眾輔助智駕功能。最關鍵的是,元戎啟行還提供后續的OTA升級,會繼續解鎖新的功能,持續提升兩套方案的智駕能力。所以即便是當下智駕性能低于D-PRO的D-AIR,未來也有升級至高級智駕的潛力。
百度Apollo:開放自主可控,高精地圖輕量化
近日,百度Apollo發布了全新升級的駕艙圖產品矩陣,同時發布了《智能駕駛開放白皮書》。其中百度表示充分理解并尊重車企對“智能化自主可控”的訴求,智能化合作伙伴應該與車企一起探索并構建新型的合作關系,提供開放的體驗定義、自主體驗進化和全周期的OTA服務等。
在智駕方面,百度Apollo推出了其旗艦城市智駕產品Apollo City Driving Max,搭建兩顆英偉達Orin X,總算力高達508 TOPS。百度強調這是國內唯一一款靠純視覺感知就能在城市道路上提供連貫體驗的產品,激光雷達則可以用于實現感知冗余。
至于高速智駕、行泊一體產品Apollo Highway Driving Pro,百度則將其算力平臺從TI的雙TDA4-VM升級至單TDA4-VH,以更低算力和更低成本實現高階行泊一體,首臺搭載該產品的車型為新款嵐圖FREE。在其他計算硬件平臺的選擇上,百度選擇了與黑芝麻智能達成合作。16日上海車展前夕,百度Apollo宣布將黑芝麻智能***作為首選***合作伙伴,未來將會把Apollo Highway Driving Pro部署到華山二號A1000芯片算力平臺上,預計將在Q3正式發布。
考慮到百度Apollo本身的產品定位就是“駕艙圖”,此次矩陣升級自然也少不了智能地圖。首先是車載導航地圖,據百度聲稱質量、性能和數據實時性均獲得了提升,且百度本身就擁有百度地圖汽車版這一優勢產品存在,Apollo也提供了多種接入方式。像紅綠燈倒計時這種功能,就是通過大數據計算和官方數據接入來實現的。
至于高精地圖,百度Apollo并沒有選擇將其邊緣化,而是走起了輕量化路線。比如上面提到的Apollo City Driving Max,就選擇了搭載輕量級高精地圖,據其描述,要比行業通用的傳統高精地圖“輕”近80%。尚不清楚這里的輕量化是地圖大小輕量化還是測繪輕量化,但不管是哪種,無疑都是加快城市高精地圖泛化的實現方式。所以百度在深厚的地圖技術積累下,是肯定不會放棄將“圖”作為優勢的。
寫在最后
從以上三家的新方案來看,慢慢拋棄或淡化對高精地圖的依賴已經成為一種趨勢。這其實也很好理解,感知層硬件的成本降低與普及速度加快了,計算層硬件的性能和工藝也翻倍了,算法層的軟件也在逐步完善,反倒是高精地圖還是在緩步前行,只有高速路完成覆蓋,城區道路推進緩慢。
但具體成效如何,感知和計算上的突破能否補足舍棄高精地圖帶來的一定信息缺失,都是我們需要在未來持續觀察的。畢竟智能駕駛發展至今,過去的所有設計都是在做加法,如今開始做減法固然有降低成本的考量在內,安全性是否會也一并打折扣,仍要等待驗證。
發布評論請先 登錄
自動駕駛中的“無圖”真的不需要地圖嗎?

隱式地圖:自動駕駛的“數字直覺“

英飛凌汽車雷達解決方案:開啟高階智駕感知新范式
得一微YEESTOR eMMC實現高精地圖高效存儲
智駕感知系統中立體視覺相對于LiDAR的性能優勢


立體視覺和激光雷達在3D智駕感知領域的差異分析

Momenta創新成果獲得央視重點關注
什么樣的地圖在自動駕駛中才能稱為“輕圖”?

施耐德電氣如何助力生命科學與電子行業發展
高德地圖與通義實驗室達成深度合作
實時生成式地圖對于自動駕駛來說有什么作用?

國產核心板:工控品質+自主生態,助力工業未來
從“三共計算”到生態重塑,艙駕融合開啟智駕新范式

康謀方案 | 高精LiDAR+神經渲染3DGS的完美融合實踐




 工商網監
工商網監
評論