") 仔細(xì)看完你就懂卡爾曼濾波(Kalman Filter)
仔細(xì)看完你就懂卡爾曼濾波(Kalman Filter)

一、引言
以下我們引用文獻(xiàn)【1】中的一段話作為本文的開始:
想象你在黃昏時(shí)分看著一僅僅小鳥飛行穿過濃密的叢林。你僅僅能隱隱約約、斷斷續(xù)續(xù)地瞥見小鳥運(yùn)動(dòng)的閃現(xiàn)。你試圖努力地猜測小鳥在哪里以及下一時(shí)刻它會(huì)出如今哪里,才不至于失去它的行蹤。或者再想象你是二戰(zhàn)中的一名雷達(dá)操作員,正在跟蹤一個(gè)微弱的游移目標(biāo)。這個(gè)目標(biāo)每隔10秒鐘在屏幕上閃爍一次。
或者回到更遠(yuǎn)的從前。想象你是開普勒,正試圖依據(jù)一組通過不規(guī)則和不準(zhǔn)確的測量間隔得到的非常不精確的角度觀測值來又一次構(gòu)造行星的運(yùn)動(dòng)軌跡。在全部這些情況下。你都試圖依據(jù)隨對(duì)問變化并且?guī)в性肼暤挠^察數(shù)據(jù)去預(yù)計(jì)物理系統(tǒng)的狀態(tài)(比如位置、速度等等)。這個(gè)問題能夠被形式化表示為時(shí)序概率模型上的推理,模型中的轉(zhuǎn)移模型描寫敘述了運(yùn)動(dòng)的物理本質(zhì),而傳感器模型則描寫敘述了測量過程。
為解決這類問題。人們發(fā)展出來了一種特殊的表示方法和推理算法——卡爾曼濾波。
二、基本概念
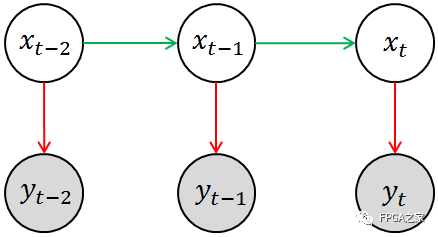
回憶一下HMM的基本模型(例如以下圖所看到的)。當(dāng)中涂有陰影的圓圈(yt-2,yt-1,yt)相當(dāng)于是觀測變量,空白圓圈(xt-2,xt-1,xt)相當(dāng)于是隱變量。
這事實(shí)上揭示了卡爾曼濾波與HMM之間擁有非常深的淵源。
回到剛剛提及的那幾個(gè)樣例,你所觀測到的物體狀態(tài)(比如雷達(dá)中目標(biāo)的位置或者速度)相當(dāng)于是對(duì)其真實(shí)狀態(tài)的一種預(yù)計(jì)(由于觀測的過程中必定存在噪聲),用數(shù)學(xué)語言來表述就是P(yt|xt),這就是模型中的測量模型或測量概率(Measurement Probability)。另外一方面,物體當(dāng)前的(真實(shí))狀態(tài)應(yīng)該與其上一個(gè)觀測狀態(tài)相關(guān),即存在這樣的一個(gè)分布P(xt|xt-1),這就是模型中的轉(zhuǎn)移模型或轉(zhuǎn)移概率(Transition Probability)。當(dāng)然,HMM中隱變量必須都是離散的,觀測變量并無特殊要求。
而從信號(hào)處理的角度來講,濾波是從混合在一起的諸多信號(hào)中提取出所需信號(hào)的過程[2]。比如,我們有一組含有噪聲的行星執(zhí)行軌跡。我們希望濾除當(dāng)中的噪聲,預(yù)計(jì)行星的真實(shí)運(yùn)動(dòng)軌跡。這一過程就是濾波。
假設(shè)從機(jī)器學(xué)習(xí)和數(shù)據(jù)挖掘的角度來說。濾波是一個(gè)理性智能體為了把握當(dāng)前狀態(tài)以便進(jìn)行理性決策所採取的行動(dòng)[1]。比方,前兩天我們沒出門,可是我們能夠從房間里觀察路上的行人有沒有打傘(觀測狀態(tài))來預(yù)計(jì)前兩天有沒有下雨(真實(shí)狀態(tài))。
基于這些情況,如今我們要來決策今天(是否會(huì)有雨以及)外出是否須要打傘。這個(gè)過程就是濾波。
讀者應(yīng)該注意把握上面兩個(gè)定義的統(tǒng)一性。
所謂預(yù)計(jì)就是依據(jù)測量得出的與狀態(tài)X(t) 有關(guān)的數(shù)據(jù)Y(t) =h[X(t)] + V(t) 解算出X(t)的計(jì)算值 ,當(dāng)中隨機(jī)向量V(t) 為測量誤差,
,當(dāng)中隨機(jī)向量V(t) 為測量誤差, 稱為X的預(yù)計(jì),Y 稱為 X 的測量。
稱為X的預(yù)計(jì),Y 稱為 X 的測量。
由于是依據(jù)Y(t) 確定的.所以?是Y(t) 的函數(shù)。
若?是Y 的線性函數(shù)。則 X?稱作 X 的線性預(yù)計(jì)。設(shè)在 [t0,?t1] 時(shí)間段內(nèi)的測量為Y。對(duì)應(yīng)的預(yù)計(jì)為。則
當(dāng)t=t1時(shí)。?稱為X(t)的預(yù)計(jì)。
當(dāng)t>t1肘,稱為X(t)的預(yù)測;
當(dāng)t稱為X(t)的平滑。
最優(yōu)預(yù)計(jì)是指某一指標(biāo)函數(shù)達(dá)到最值時(shí)的預(yù)計(jì)。
卡爾曼濾波就是一種線性最優(yōu)濾波器。
由于后面會(huì)用到。這里我們補(bǔ)充一下關(guān)于協(xié)方差矩陣的概念。
設(shè)n維隨機(jī)變量(X1,X2,…,Xn)的2階混合中心距
σij= cov(Xi,Xj) = E[(Xi-E(Xi))(Xj-E(Xj))], (i,j = 1, 2,…,n)
都存在,則稱矩陣
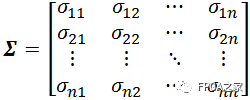
為n維隨機(jī)變量(X1,X2,…,Xn)的協(xié)方差矩陣,協(xié)方差矩陣是一個(gè)對(duì)稱矩陣,并且對(duì)角線是各個(gè)維度的方差。
維基百科中還給出了協(xié)方差矩陣的一些重要性質(zhì),比如以下這兩條(此處不做具體證明)。
興許的內(nèi)容會(huì)用到當(dāng)中的第一條。

三、卡爾曼濾波的方程推導(dǎo)
直接從數(shù)學(xué)公式和概念入手來考慮卡爾曼濾波無疑是一件非常枯燥的事情。為了便于理解,我們?nèi)匀粡囊粋€(gè)現(xiàn)實(shí)中的實(shí)例開始以下的介紹。這一過程中你所需的預(yù)備知識(shí)僅僅是高中程度的物理學(xué)內(nèi)容。
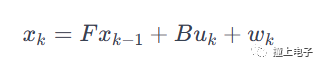
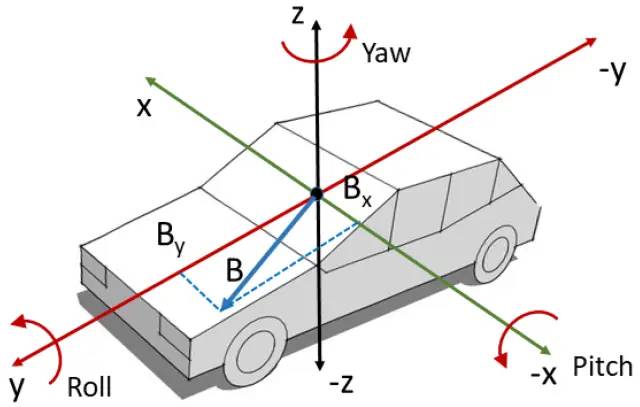
假如如今有一輛在路上做直線運(yùn)動(dòng)的小車(例如以下所看到的),該小車在t時(shí)刻的狀態(tài)能夠用一個(gè)向量來表示,當(dāng)中pt表示他當(dāng)前的位置,vt表示該車當(dāng)前的速度。當(dāng)然,司機(jī)還能夠踩油門或者剎車來給車一個(gè)加速度ut。ut相當(dāng)于是一個(gè)對(duì)車的控制量。顯然,假設(shè)司機(jī)既沒有踩油門也沒有踩剎車,那么ut就等于0。此時(shí)車就會(huì)做勻速直線運(yùn)動(dòng)。

假設(shè)我們已知上一時(shí)刻t-1時(shí)小車的狀態(tài)。如今來考慮當(dāng)前時(shí)刻t小車的狀態(tài)。顯然有
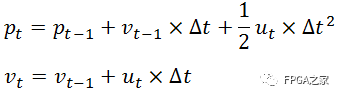
易知。上述兩個(gè)公式中,輸出變量都是輸入變量的線性組合,這也就是稱卡爾曼濾波器為線性濾波器的原因所在。既然上述公式表征了一種線性關(guān)系。那么我們就能夠用一個(gè)矩陣來表示它,則有

假設(shè)另當(dāng)中的

則得到卡爾曼濾波方程組中的第一條公式——狀態(tài)預(yù)測公式,而F就是狀態(tài)轉(zhuǎn)移矩陣。它表示我們?cè)鯓訌纳弦粻顟B(tài)來猜測當(dāng)前狀態(tài)。而B則是控制矩陣,它表示控制量u怎樣作用于當(dāng)前狀態(tài)。
 ???(1)
???(1)
上式中x頂上的hat表示為預(yù)計(jì)值(而非真實(shí)值)。等式左端部分的右上標(biāo)“-”表示該狀態(tài)是依據(jù)上一狀態(tài)猜測而來的,稍后我們還將對(duì)其進(jìn)行修正以得到最優(yōu)預(yù)計(jì)。彼時(shí)才干夠?qū)ⅰ?”去掉。
既然我們是在對(duì)真實(shí)值進(jìn)行預(yù)計(jì),那么就理應(yīng)考慮到噪聲的影響。
實(shí)踐中,我們通常都是假設(shè)噪聲服從一個(gè)0均值的高斯分布。即Noise~Guassian(0,σ)。
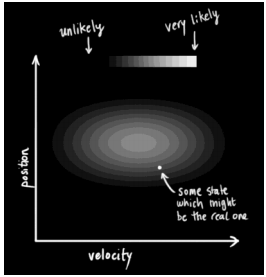
比如對(duì)于一個(gè)一維的數(shù)據(jù)進(jìn)行預(yù)計(jì)時(shí),若要引入噪聲的影響。事實(shí)上僅僅要考慮當(dāng)中的方差σ就可以。當(dāng)我們將維度提高之后。為了綜合考慮各個(gè)維度偏離其均值的程度,就須要引入?yún)f(xié)方差矩陣。
回到我們的樣例。系統(tǒng)中每一個(gè)時(shí)刻的不確定性都是通過協(xié)方差矩陣Σ來給出的。
并且這樣的不確定性在每一個(gè)時(shí)刻間還會(huì)進(jìn)行傳遞。也就是說不僅當(dāng)前物體的狀態(tài)(比如位置或者速度)是會(huì)(在每一個(gè)時(shí)刻間)進(jìn)行傳遞的,并且物體狀態(tài)的不確定性也是會(huì)(在每一個(gè)時(shí)刻間)進(jìn)行傳遞的。這樣的不確定性的傳遞就能夠用狀態(tài)轉(zhuǎn)移矩陣來表示,即(注意。這里用到了前面給出的關(guān)于協(xié)方差矩陣的性質(zhì))

可是我們還應(yīng)該考慮到。預(yù)測模型本身也并不絕對(duì)準(zhǔn)確的,所以我們要引入一個(gè)協(xié)方差矩陣Q來表示預(yù)測模型本身的噪聲(也即是噪聲在傳遞過程中的不確定性),則有
 ? (2)
? (2)
這就是卡爾曼濾波方程組中的第二條公式,它表示不確定性在各個(gè)時(shí)刻間的傳遞關(guān)系。
繼續(xù)我們的小汽車樣例。你應(yīng)該注意到,前面我們所討論的內(nèi)容都是環(huán)繞小汽車的真實(shí)狀態(tài)展開的。
而真實(shí)狀態(tài)我們事實(shí)上是無法得知的,我們僅僅能通過觀測值來對(duì)真實(shí)值進(jìn)行預(yù)計(jì)。
所以如今我們?cè)诼飞喜荚O(shè)了一個(gè)裝置來測定小汽車的位置。觀測到的值記為Y(t)。
并且從小汽車的真實(shí)狀態(tài)到其觀測狀態(tài)另一個(gè)變換關(guān)系。這個(gè)變換關(guān)系我們記為h(?)。并且這個(gè)h(?)還是一個(gè)線性函數(shù)。此時(shí)便有(該式前面以前給出過)
Y(t) =h[X(t)] + V(t)
當(dāng)中V(t)表示觀測的誤差。既然h(?)還是一個(gè)線性函數(shù),所以我們相同能夠把上式改寫成矩陣的形式。則有
Yt=Hxt+ v
就本例而言,觀測矩陣H= [1 0],這事實(shí)上告訴我們x和Z的維度不一定非得相同。
在我們的樣例中,x是一個(gè)二維的列向量,而Z僅僅是一個(gè)標(biāo)量。此時(shí)當(dāng)把x與上面給出的H相乘就會(huì)得出一個(gè)標(biāo)量,此時(shí)得到的Y就是x中的首個(gè)元素,也就是小車的位置。
相同,我們還須要用一個(gè)協(xié)方差矩陣R來代替上述式子中的v來表示觀測中的不確定性。
當(dāng)然,由于Z是一個(gè)一維的值,所以此時(shí)協(xié)方差矩陣R也僅僅有一維,也就是僅僅有一個(gè)值,即觀測噪聲之高斯分布的參數(shù)σ。假設(shè)我們有非常多裝置來測量小汽車的不同狀態(tài),那么Z就會(huì)是一個(gè)包括全部觀測值的向量。
接下來要做的事情就是對(duì)前面得出的狀態(tài)預(yù)計(jì)進(jìn)行修正,具體而言就是利用以下這個(gè)式子
 ??? (4)
??? (4)
直觀上來說,上式并不難理解。前面我們提到。 是依據(jù)上一狀態(tài)猜測而來的。那么它與“最優(yōu)”預(yù)計(jì)值之間的差距如今就是等式右端加號(hào)右側(cè)的部分。
是依據(jù)上一狀態(tài)猜測而來的。那么它與“最優(yōu)”預(yù)計(jì)值之間的差距如今就是等式右端加號(hào)右側(cè)的部分。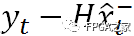 表示實(shí)際觀察值與預(yù)估的觀測值之間的殘差。這個(gè)殘差再乘以一個(gè)系數(shù)K就能夠用來對(duì)預(yù)計(jì)值進(jìn)行修正。
表示實(shí)際觀察值與預(yù)估的觀測值之間的殘差。這個(gè)殘差再乘以一個(gè)系數(shù)K就能夠用來對(duì)預(yù)計(jì)值進(jìn)行修正。
K稱為卡爾曼系數(shù),它也是一個(gè)矩陣,它是對(duì)殘差的加權(quán)矩陣。有的資料上稱其為濾波增益陣。
 ?? (3)
?? (3)
上式的推導(dǎo)比較復(fù)雜,有興趣深入研究的讀者能夠參閱文獻(xiàn)【2】(P35~P37)。
假設(shè)有時(shí)間我會(huì)在后面再做具體推導(dǎo)。可是如今我們?nèi)匀荒軌蚨ㄐ缘貙?duì)這個(gè)系數(shù)進(jìn)行解讀:濾波增益陣首先權(quán)衡預(yù)測狀態(tài)協(xié)方差矩陣Σ和觀測值矩陣R的大小。并以此來認(rèn)為我們是更傾向于相信預(yù)測模型還是具體觀測模型。
假設(shè)相信預(yù)測模型多一點(diǎn)。那么這個(gè)殘差的權(quán)重就會(huì)小一點(diǎn)。反之亦然。假設(shè)相信觀察模型多一點(diǎn),這個(gè)殘差的權(quán)重就會(huì)大一點(diǎn)。不僅如此,濾波增益陣還負(fù)責(zé)把殘差的表現(xiàn)形式從觀測域轉(zhuǎn)換到了狀態(tài)域。
比如本題中觀測值Z僅僅是一個(gè)一維的向量,狀態(tài)x是一個(gè)二維的向量。
所以在實(shí)際應(yīng)用中,觀測值與狀態(tài)值所採用的描寫敘述特征或者單位都有可能不同,顯然直接用觀測值的殘差去更新狀態(tài)值是不合理的。
而利用卡爾曼系數(shù),我們就能夠完畢這樣的轉(zhuǎn)換。比如。在小車運(yùn)動(dòng)這個(gè)樣例中,我們僅僅觀察到了汽車的位置,但K里面已經(jīng)包括了協(xié)方差矩陣P的信息(P里面就給出了速度和位置的相關(guān)性)。所以它利用速度和位置這兩個(gè)維度的相關(guān)性,從位置的殘差中推算出了速度的殘差。
從而讓我們能夠?qū)顟B(tài)值x的兩個(gè)維度同一時(shí)候進(jìn)行修正。
最后,還需對(duì)最優(yōu)預(yù)計(jì)值的噪聲分布進(jìn)行更新。所使用的公式為
 ?(5)
?(5)
至此。我們便獲得了實(shí)現(xiàn)卡爾曼濾波所需的全部五個(gè)公式,我在前面分別用(1)~(5)的標(biāo)記進(jìn)行了編號(hào)。我如今把它們?cè)俅瘟_列出來:
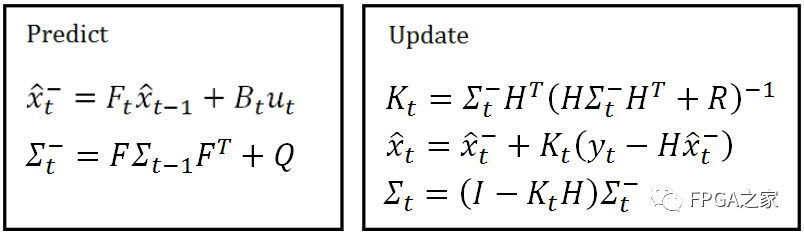
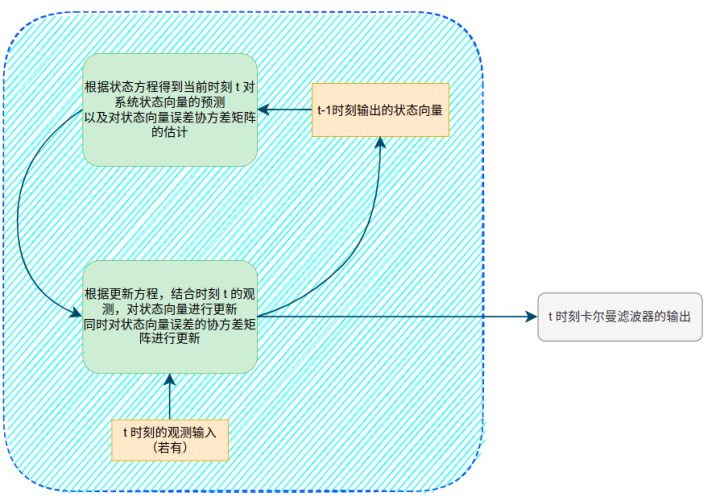
我們將這五個(gè)公式分成預(yù)測組和更新組。
預(yù)測組總是依據(jù)前一個(gè)狀態(tài)來預(yù)計(jì)當(dāng)前狀態(tài)。更新組則依據(jù)觀測信息來對(duì)預(yù)測信息進(jìn)行修正。以期達(dá)到最優(yōu)預(yù)計(jì)之目的。
四、一個(gè)簡單的實(shí)例
當(dāng)然,你可能困惑于卡爾曼濾波是否真的有效。以下利用文獻(xiàn)[4]中給出的樣例(為提升顯示效果。筆者略有改動(dòng))來演示卡爾曼濾波的威力。
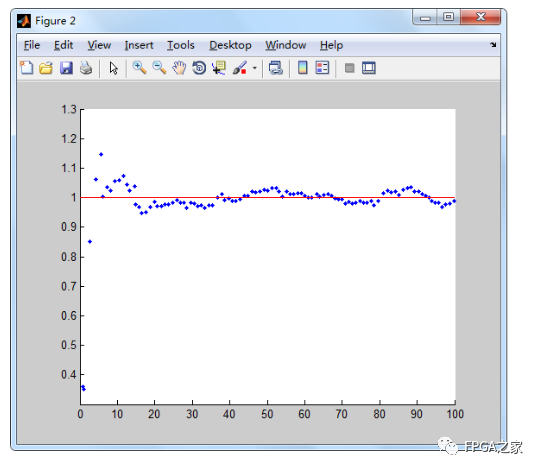
這個(gè)樣例模擬質(zhì)點(diǎn)進(jìn)行勻速直線運(yùn)動(dòng)(速度為1),然后引入一個(gè)非常大的噪聲。再用卡爾曼濾波來對(duì)質(zhì)點(diǎn)的運(yùn)動(dòng)狀態(tài)進(jìn)行軌跡。注意是勻速直線運(yùn)動(dòng)。所以當(dāng)中不含有控制變量。
Z=(1:100); %觀測值
noise=randn(1,100); %方差為1的高斯噪聲
Z=Z+noise;
X=[0; 0]; %狀態(tài)
Sigma = [1 0; 0 1]; %狀態(tài)協(xié)方差矩陣
F=[1 1; 0 1]; %狀態(tài)轉(zhuǎn)移矩陣
Q=[0.0001, 0; 0 0.0001]; %狀態(tài)轉(zhuǎn)移協(xié)方差矩陣
H=[1 0]; %觀測矩陣
R=1; %觀測噪聲方差
figure;
hold on;
for i=1:100
X_ = F*X;
Sigma_ = F*Sigma*F'+Q;
K = Sigma_*H'/(H*Sigma_*H'+R);
X = X_+K*(Z(i)-H*X_);
Sigma = (eye(2)-K*H)*Sigma_;
plot(X(1), X(2), '.','MarkerSize',10); %畫點(diǎn),橫軸表示位置。縱軸表示速度
end
plot([0,100],[1,1],'r-');
下圖給出了上述代碼的執(zhí)行結(jié)果。
可見經(jīng)過最開始的幾次迭代后。質(zhì)點(diǎn)運(yùn)動(dòng)的狀態(tài)預(yù)計(jì)就回到了正確軌跡上,并且預(yù)計(jì)的結(jié)果基本環(huán)繞在真實(shí)值附近,效果還是非常理想的。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2576文章
55041瀏覽量
791329 -
濾波器
+關(guān)注
關(guān)注
162文章
8412瀏覽量
185713 -
HMM
+關(guān)注
關(guān)注
0文章
14瀏覽量
10382 -
卡爾曼濾波
+關(guān)注
關(guān)注
3文章
167瀏覽量
25434 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8553瀏覽量
136948
原文標(biāo)題:仔細(xì)看完你就懂卡爾曼濾波(Kalman Filter)
文章出處:【微信號(hào):zhuyandz,微信公眾號(hào):FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
卡爾曼濾波算法的基本原理
卡爾曼濾波的原理說明
卡爾曼濾波程序的轉(zhuǎn)換問題
卡爾曼濾波有哪些應(yīng)用
卡爾曼濾波簡介
Kalman濾波在視頻監(jiān)控中的應(yīng)用
什么是卡爾曼濾波? 淺談卡爾曼濾波眼里的機(jī)器人問題
擴(kuò)展卡爾曼濾波的原理

卡爾曼濾波的變種有哪些?1
卡爾曼濾波的變種有哪些?2



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論