") 小型平行履帶底盤實現(xiàn)雙灰度循跡功能
小型平行履帶底盤實現(xiàn)雙灰度循跡功能

1. 功能說明
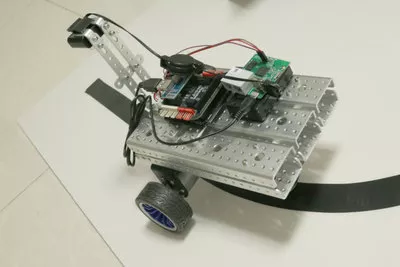
在小型平行履帶底盤樣機上安裝2個 灰度傳感器 ,實現(xiàn)機器人沿指定路線進行運動的效果。

2. 使用樣機
本實驗使用的樣機為R026a樣機。
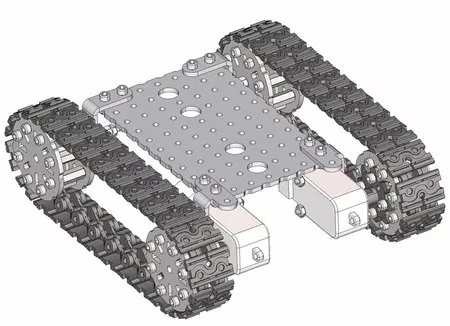
3. 功能實現(xiàn)
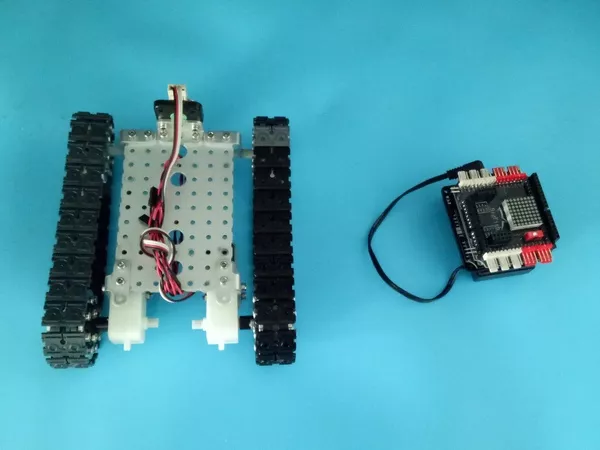
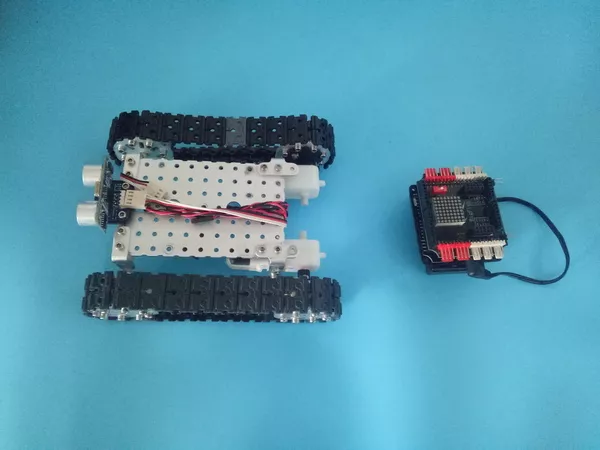
3.1 電子硬件
在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴展板 | Bigfish2.1 |
| 傳感器 | 灰度傳感器 |
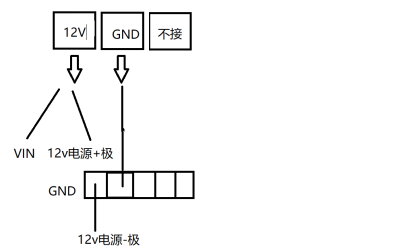
| 電池 | 7.4V鋰電池 |
3.2 編寫程序
編程環(huán)境:Arduino 1.8.19
編寫并燒錄以下程序(2gray_blackline.ino),該程序?qū)崿F(xiàn)演示動圖中的動作【例程源代碼資料下載詳見 https://www.robotway.com/h-col-114.html】
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-02-09 https://www.robotway.com/ ------------------------------ 實驗接線:兩個直流電機接口的針腳號分別為D5,D6以及D9,D10;灰度傳感器連在A0、A4接口上 ------------------------------------------------------------------------------------*/ int i=0; void Forward(); void Back(); void Turn_left(); void Turn_right(); void Speed_up(); void Slow_down(); void setup() { // put your setup code here, to run once: pinMode(A0,INPUT); pinMode(A4,INPUT); pinMode(9,OUTPUT); pinMode(10,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); Serial.begin(9600); } void loop() { // put your main code here, to run repeatedly: int a=digitalRead(A0); int b=digitalRead(A4); Serial.println(a); Serial.println(b);//Here is serial monitor,you will kown in later learning if(a==0&&b==0) Forward(); if(a==1&&b==0) Turn_left(); if(a==0&&b==1) Turn_right(); } void Forward()// { analogWrite(9,120); analogWrite(10,0); analogWrite(5,120); analogWrite(6,0); delay(50); } void Back() { digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(5,LOW); digitalWrite(6,HIGH); delay(4000); } void Turn_left() { digitalWrite(9,0); digitalWrite(10,0); digitalWrite(5,100); digitalWrite(6,0); delay(50); } void Turn_right() { digitalWrite(9,100); digitalWrite(10,0); digitalWrite(5,0); digitalWrite(6,0); delay(50); } void Speed_up() { for(i=0;i<=255;i+=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); }//speed up } void Slow_down() { for(i=255;i>=0;i-=5) { analogWrite(9,i); analogWrite(10,0); analogWrite(5,i); analogWrite(6,0); delay(50); } }
審核編輯黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2576文章
55029瀏覽量
791249 -
機器人
+關(guān)注
關(guān)注
213文章
31074瀏覽量
222189
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
斜三角履帶底盤的制作
1.運動功能說明 ? ? ? ?斜三角履帶底盤可以通過兩側(cè)履帶的差速運動來實現(xiàn)前進、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛

小型平行履帶底盤的制作分享
小型平行履帶底盤可以通過兩側(cè)履帶的 差速運動 來實現(xiàn)前進、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛
履帶機器人 金屬底盤
` 本帖最后由 威凱-智控 于 2012-8-14 23:28 編輯
今天給大家分享一個全金屬的履帶機器人底盤準(zhǔn)備最履帶機器人的朋友們,可以一起交流一下機器人瘋狂愛好者 讓思維沸騰起來 讓智慧行動起來 共同創(chuàng)造機器人的精彩!
發(fā)表于 08-14 23:25
履帶底盤的結(jié)構(gòu)部分
寫在前面:看著網(wǎng)上那些履帶底盤,怎么看怎么不舒服,還是決定自己做。這樣就帶來一個很大的問題,就是很多結(jié)構(gòu)件都要用3D打印。我自己有3D打印機,下面不但會給出設(shè)計,還會給出實物照片。但是,對于沒有3D
發(fā)表于 02-19 03:54
循跡智能小車是由哪些部分組成的
循跡智能小車 循黑線文章目錄循跡智能小車 循黑線硬件菜單硬件使用硬件組裝程序設(shè)計前的理解程序代碼硬件菜單單片機型號:STC16F40K1284路紅外循跡模塊小車底盤套件(一個
發(fā)表于 07-14 06:56
使用以雙灰度傳感器實現(xiàn)的曲線循跡以及矩形循跡的資料說明
在這次課程中,我們小組選定的課題是循跡小車,在長達數(shù)周的辛苦付出中,我組小車已能實現(xiàn)的功能有1.紅遙控小車2.以灰度傳感器實現(xiàn)矩形
發(fā)表于 12-23 08:00
?12次下載
藍牙遙控履帶底盤行駛
1. 功能描述 本文提供的示例所實現(xiàn)的功能為:用手機APP遙控斜三角履帶底盤樣機實現(xiàn)移動,包括前

小型雙節(jié)履帶底盤的制作
1.運動功能說明 雙節(jié)履帶車可以通過兩個驅(qū)動輪的差速運動來實現(xiàn)前進、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛功能,并可通過舵機關(guān)節(jié)模塊進行小臂的

正三角履帶底盤的制作分享
1.運動功能說明 正三角履帶底盤可以通過兩側(cè)履帶的差速運動來實現(xiàn)前進、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛

小型三節(jié)履帶底盤的制作
雙節(jié)履帶車可以通過兩個驅(qū)動輪的差速運動來實現(xiàn)前進、后退、原地轉(zhuǎn)向、大半徑轉(zhuǎn)向等基本行駛功能,并可通過舵機關(guān)節(jié)模塊進行小臂的抬起和落下。通過底盤
小型雙輪差速底盤視覺循跡功能的實現(xiàn)
1. 任務(wù)描述 ? ? ? 在機器人小車上搭載攝像頭,攝像頭采集圖像信息并通過WiFi將信息傳遞給PC端,然后PC端使用OpenCV對攝像頭讀取到的視頻進行灰度化、高斯濾波、腐蝕、膨脹等處理,使圖像
如何讓小型雙輪差速底盤實現(xiàn)雙灰度循跡功能?
1. 功能說明 ? ?在機器人車體上安裝2個 灰度傳感器 ,實現(xiàn)機器人按照下圖所指定的路線進行導(dǎo)航運動,來模擬倉庫物流機器人按指定路線行進的工作過程。 ? 2. 使用樣機 ? ? 本實驗使用的樣機為

雙輪差速底盤三灰度循跡功能的實現(xiàn)
1. 功能說明 ? ? 在小型雙輪差速底盤樣機前方安裝3個 灰度傳感器 ,實現(xiàn)機器人沿下圖所指定的跑道路線進行運動的效果。 2. 使用樣機
小型平行履帶底盤實現(xiàn)紅外避障功能
1. 功能說明 ? ?本實驗使用的樣機為R026a樣機小型平行履帶底盤。在樣機前方安裝1個 近紅外傳感器 ,如果遇到障礙,機器人后退,否則機
小型平行履帶底盤實現(xiàn)超聲避障功能
1. 功能說明 ? ?本實驗使用的樣機為R026a樣機小型平行履帶底盤。在樣機前方安裝1個 超聲波傳感器?,如果遇到障礙,機器人后退、轉(zhuǎn)向,



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論