") 如何實(shí)現(xiàn)雙輪差速底盤躲避懸崖的功能?
如何實(shí)現(xiàn)雙輪差速底盤躲避懸崖的功能?

1. 功能說明
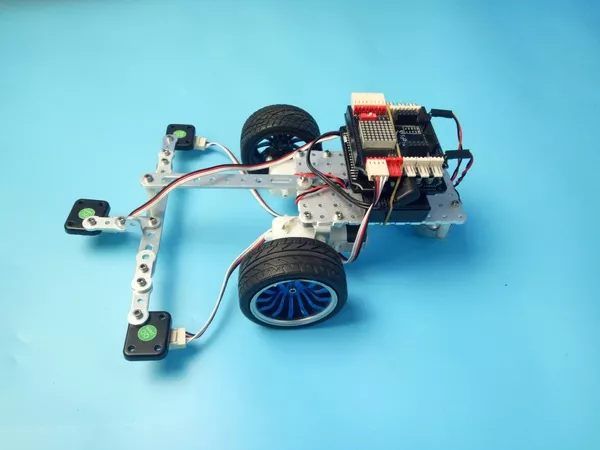
本實(shí)驗(yàn)使用的樣機(jī)為R023樣機(jī)小型雙輪差速底盤。在樣機(jī)前方安裝3個(gè)近紅外傳感器 ,實(shí)現(xiàn)機(jī)器人躲避懸崖、在某平臺(tái)上移動(dòng)時(shí)不會(huì)掉下去的效果。
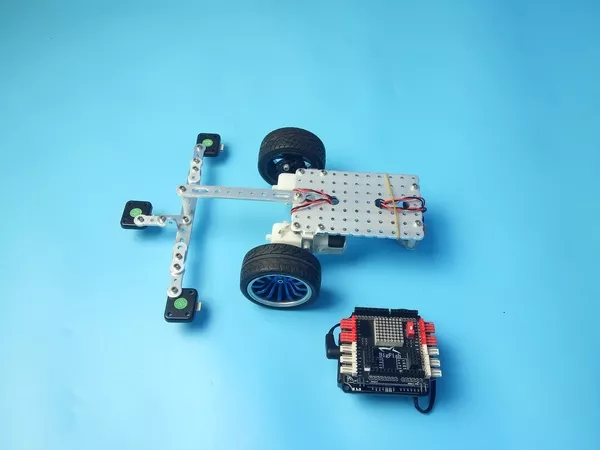
2. 電子硬件
在這個(gè)示例中,我們采用了以下硬件,請(qǐng)大家參考:
| 主控板 | Basra(兼容Arduino Uno) |
| 擴(kuò)展板 | Bigfish2.1 |
| 傳感器 | 近紅外傳感器 |
| 電池 | 7.4V鋰電池 |
左輪直流電機(jī)連在D9,D10接口上;右輪直流電機(jī)連在D5,D6接口上;3個(gè)近紅外傳感器從左到右分別連在A0、A4、A3接口上。
3. 示例程序
編程環(huán)境:Arduino 1.8.19
編寫并燒錄以下程序(nine.ino),該程序?qū)?shí)現(xiàn)演示視頻中的動(dòng)作【完整資料請(qǐng)參考https://www.robotway.com/h-col-113.html】
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機(jī)器譜 2023-02-10 https://www.robotway.com/ ------------------------------------------------------------------------------------*/ void Right(); void Left(); void Stop(); void Forward(); void Back(); void setup() { pinMode( 17, INPUT); pinMode( 18, INPUT); pinMode( 14, INPUT); pinMode( 10, OUTPUT); pinMode( 6, OUTPUT); pinMode( 5, OUTPUT); pinMode( 9, OUTPUT); } void loop() { if (((!( digitalRead(14)) && ! (digitalRead(17)) ) )) { Forward(); } if (( digitalRead(14) )) { Left(); delay( 300 ); } if (( digitalRead(17) )) { Right(); delay( 300 ); } if (( digitalRead(18) )) { Back(); delay( 1000 ); analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 100); delay( 1500 ); } } void Right() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Forward() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 100); analogWrite(10 , 0); } void Back() { analogWrite(5 , 0); analogWrite(6 , 100); analogWrite(9 , 0); analogWrite(10 , 100); } void Left() { analogWrite(5 , 100); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); } void Stop() { analogWrite(5 , 0); analogWrite(6 , 0); analogWrite(9 , 0); analogWrite(10 , 0); }
4. 擴(kuò)展
本實(shí)驗(yàn)采用3個(gè)近紅外傳感器,利用的是近紅外傳感器能夠識(shí)別到距離較近的桌面,無法識(shí)別到距離較遠(yuǎn)的地面,因此桌面要距離地面遠(yuǎn)一些。
本實(shí)驗(yàn)還可以使用灰度傳感器或者白標(biāo)傳感器。利用的是灰度和白標(biāo)在懸崖處極難收到反射回來的紅外線的原理,因此相應(yīng)的桌面必須是淺色,如果桌面也是深色,灰度和白標(biāo)傳感器就無法區(qū)分桌面和懸崖了。
審核編輯黃宇
?
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2576文章
55028瀏覽量
791243 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222185 -
編程
+關(guān)注
關(guān)注
90文章
3716瀏覽量
97179
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
格陸博科技榮登2025創(chuàng)業(yè)邦100未來獨(dú)角獸榜單
2026年1月15日,在創(chuàng)業(yè)邦年度頒獎(jiǎng)盛典上,格陸博科技憑借其在智能底盤領(lǐng)域的創(chuàng)新實(shí)力與市場(chǎng)表現(xiàn),成功入選“創(chuàng)業(yè)邦100未來獨(dú)角獸”榜單。公司以“成熟主力業(yè)務(wù)+前沿創(chuàng)新產(chǎn)品”的雙輪戰(zhàn)略,持續(xù)領(lǐng)跑智能底盤賽道,為智能出行提供堅(jiān)實(shí)可
智能底盤電機(jī)驅(qū)動(dòng)應(yīng)用方案
智能底盤技術(shù)是汽車電氣化和智能化技術(shù)革命的產(chǎn)物。它不僅提高了車輛的整體效率,還提高了車輛的安全性。類比半導(dǎo)體公司為智能底盤系統(tǒng)提供一系列高性能電機(jī)驅(qū)動(dòng)器和傳感器接口芯片。這些芯片以其出色的控制精度和穩(wěn)定性,支持自動(dòng)駕駛功能和先進(jìn)
格陸博科技亮相蓋世汽車2025底盤大會(huì)
11月19日,蓋世汽車舉辦的底盤大會(huì)隆重召開,本屆大會(huì)緊扣「智創(chuàng)底盤 擎動(dòng)未來」主線,聚焦線控轉(zhuǎn)向冗余安全架構(gòu)、底盤與智駕域深度融合、EMB規(guī)模化落地、智能懸架AI協(xié)同控制、線控轉(zhuǎn)向與智能輔助駕駛協(xié)同等熱點(diǎn)議題,攜手智能
速通音頻處理:掌握TTS播放、文件播放與錄音核心,實(shí)現(xiàn)完整功能
播放TTS、播放音頻文件及錄音是構(gòu)建完整音頻處理功能的三大核心模塊。若想快速掌握并實(shí)現(xiàn)完整音頻處理能力,無需深挖底層細(xì)節(jié),只需聚焦“資源加載、播放控制、狀態(tài)同步與異常處理”四大關(guān)鍵環(huán)節(jié)——本文將拆解
破解智能底盤測(cè)試4大難題:imc提供一體化解決方案
底盤技術(shù)發(fā)展趨勢(shì)Part.1智能化是汽車行業(yè)未來發(fā)展的必然趨勢(shì),底盤智能化是其核心之一。各種線控底盤技術(shù)持續(xù)進(jìn)步,并不斷與自動(dòng)駕駛技術(shù)相結(jié)合,豐富車輛的功能、提升其性能。在此浪潮下,

帝奧微推出功能安全ASIL-B車規(guī)級(jí)霍爾輪速傳感器DIA9701
控制系統(tǒng)(TCS)、電動(dòng)轉(zhuǎn)向助力系統(tǒng)(EPS)、車輛動(dòng)態(tài)控制系統(tǒng)(VDC)、間接胎壓監(jiān)測(cè)系統(tǒng)(ITPMS)、自動(dòng)變速器控制系統(tǒng)等。帝奧微推出全新車規(guī)級(jí)帶有功能安全ASILB等級(jí)的振動(dòng)抑制型霍爾輪速傳感器DIA9701系列,為輪速

雙電機(jī)后輪驅(qū)動(dòng)混合動(dòng)力汽車電子差速控制的研究
[摘要]針對(duì)雙電機(jī)后輪驅(qū)動(dòng)混合動(dòng)力汽車電子差速的控制問題,考慮車輛轉(zhuǎn)向時(shí)軸荷轉(zhuǎn)移、向心力和輪胎側(cè)偏角的影響,以車輪的滑移率為控制目標(biāo),提出了基于門限值控制的電子差速控制策略,并在 Ma
發(fā)表于 06-18 16:39
雙電機(jī)獨(dú)立驅(qū)動(dòng)電動(dòng)車電子差速技術(shù)
了8的臨界值,在8≤2%時(shí),采用自適應(yīng)調(diào)節(jié)的電子差速模式,實(shí)現(xiàn)電子差速功能;在8>2%時(shí),
發(fā)表于 06-18 16:36
掃描電機(jī)的PID恒速控制仿真及實(shí)驗(yàn)
數(shù)學(xué)模型,并通過 Matlab Simulink 搭建了仿真模型。提出了使用增量式PID控制算法實(shí)現(xiàn)電機(jī)的恒速控制,并進(jìn)行了仿真,最后,利用STC89C52將PID控制與BIDCM結(jié)合在一起,通過實(shí)驗(yàn)
發(fā)表于 06-16 21:53
Allegro Skill布線功能-添加差分過孔禁布區(qū)
它還能優(yōu)化差分信號(hào)的回流路徑,降低過孔寄生效應(yīng),減少信號(hào)反射和阻抗不連續(xù)性。通過這些措施,差分信號(hào)的傳輸質(zhì)量得以提升,從而滿足高速信號(hào)傳輸?shù)囊蟆?那么可以通過FanySkill中“布線功能-添加
發(fā)表于 05-28 15:19
?1061次閱讀

PWM脈寬調(diào)制實(shí)現(xiàn)電機(jī)的恒速驅(qū)動(dòng)
現(xiàn)在許多單片機(jī)具有 PWM 脈寬調(diào)制功能,結(jié)合單片機(jī)的定時(shí)器、計(jì)數(shù)器,我們可以很方便的實(shí)現(xiàn)電機(jī)的恒速驅(qū)動(dòng)。本文以編碼器為反饋信號(hào),構(gòu)成了電機(jī)恒速轉(zhuǎn)動(dòng)的閉環(huán)系統(tǒng)。
點(diǎn)擊附件查看全文*附件
發(fā)表于 03-25 15:06
格陸博科技出席AEE2025中國汽車底盤大會(huì)
3月19日-20日,備受矚目的2025年AEE“中國汽車底盤智能化、電動(dòng)化、輕量化大會(huì)”于安徽·合肥盛大召開。這場(chǎng)行業(yè)盛會(huì)匯聚了汽車底盤領(lǐng)域的眾多精英企業(yè)與專家學(xué)者,圍繞EMB線控制動(dòng)、線控轉(zhuǎn)向
自制怠速步進(jìn)電機(jī)測(cè)試器
步進(jìn)電機(jī)式怠速系統(tǒng)的工作原理為:由步進(jìn)電 機(jī)控制怠速進(jìn)氣孔的截面積來控制發(fā)動(dòng)機(jī)進(jìn)氣管的 進(jìn)氣量,通過進(jìn)氣壓力傳感器來感應(yīng)進(jìn)氣管的進(jìn)氣 壓力,把進(jìn)氣壓力信號(hào)送到控制單元后,再由控制 單元判斷出進(jìn)氣量或
發(fā)表于 03-21 13:32
兩線制差分式輪速傳感器AH743C應(yīng)用于自動(dòng)變速箱
兩線制差分式輪速傳感器AH743C應(yīng)用于自動(dòng)變速箱



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論