 Arduino探索漫游車1—底盤最終組裝
Arduino探索漫游車1—底盤最終組裝

這篇文章來源于DevicePlus.com英語網站的翻譯稿。
點擊此處轉到背景簡介頁面 >
目錄
? 背景簡介與設計方案
? 制造底盤
? 第一步:控制臂
? 第二步:框架模塊
? 第三步:懸架模塊和電機模塊
?第四步:減震組件
? 第五步:組裝底盤
? 結論
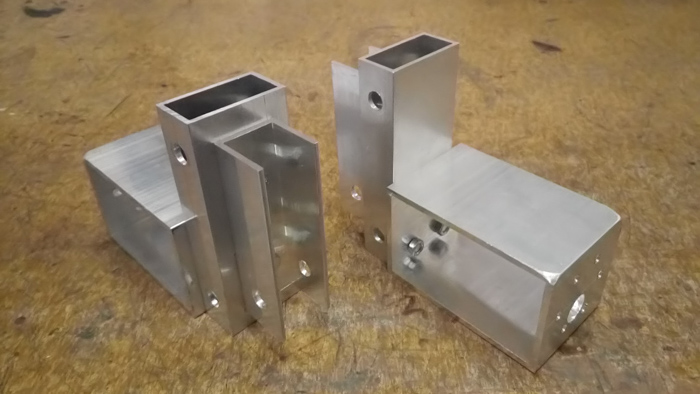
第四步:減震組件
減震組件估計是最容易制造的零部件了,只是一個帶有一些孔的小U型材。實際上,減震組件有兩種不同的類型:“框架型”和“懸架型”。這兩者的區別在于用于安裝減震器的孔的尺寸:一個為3mm,另一個為7mm。顧名思義,一個是安裝在框架模塊上,另一個是安裝在懸架模塊上。
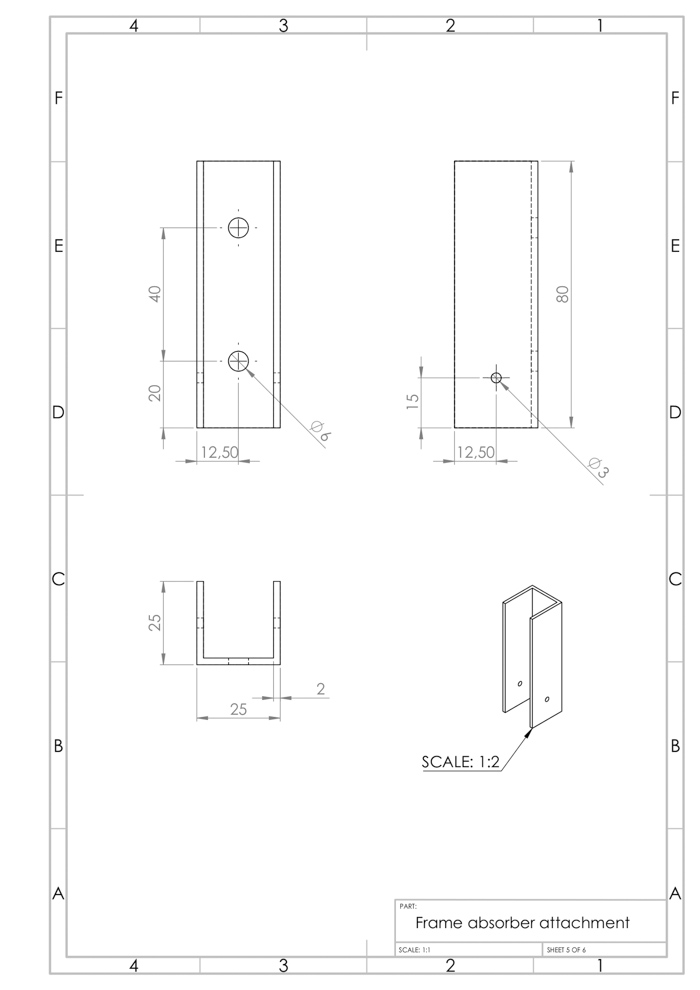
圖13:框架型減震組件圖紙(比例1:1)
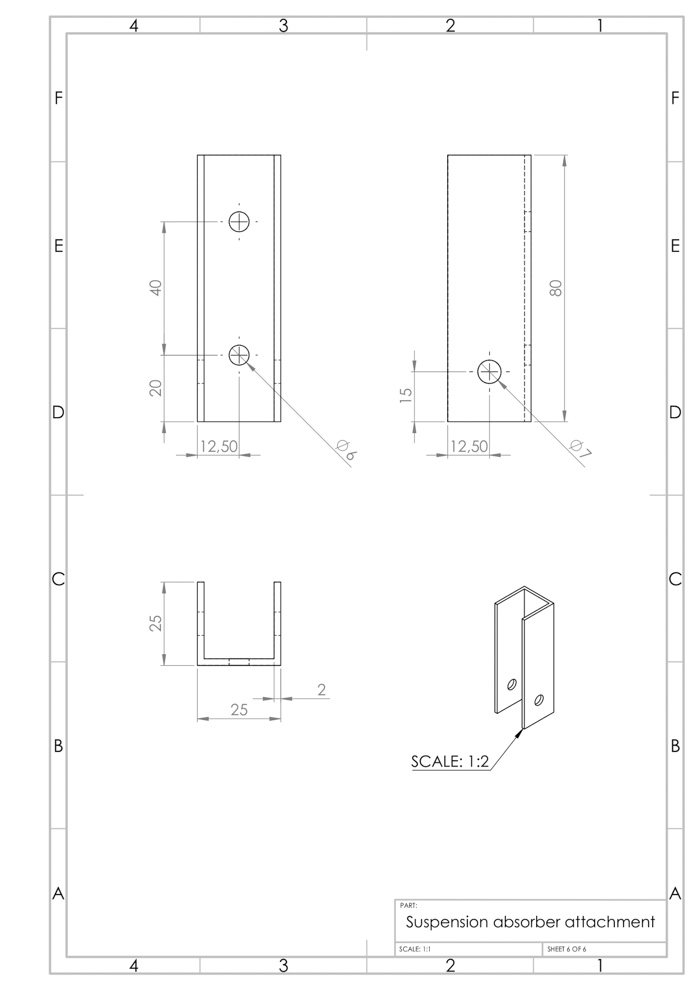
圖14:框架型減震組件圖紙(比例1:1)
4.1您現在已經知道如何鉆孔了。標記一側的所有孔,然后使用2.50mm的鉆頭鉆孔。
4.2使用6mm鉆頭來擴大用于組件安裝在懸架或框架模塊上的孔。

4.3如果您想要將組件安裝到懸架模塊上,請使用7mm鉆頭將側面的2.50mm小孔進行擴孔。如果想要將組件安裝到框架模塊上,請使用3mm鉆頭。在這兩種情況下,都要從型材的一側鉆孔直到穿過另一側。
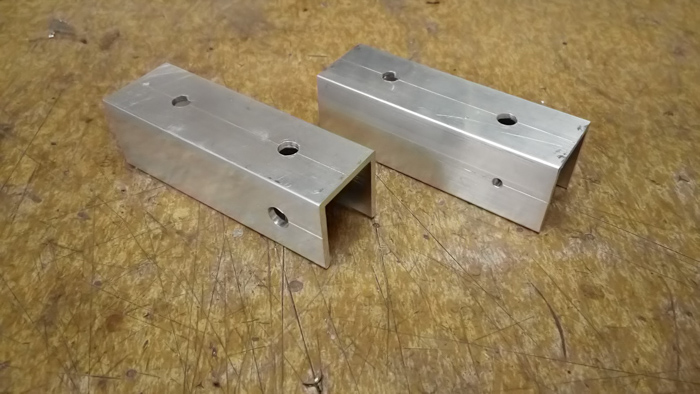
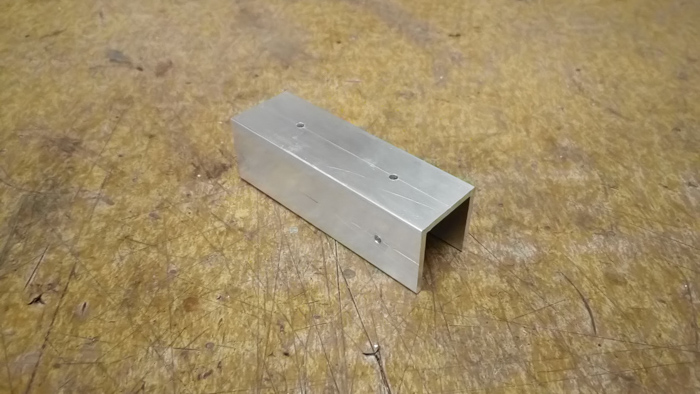
在這張圖中,組件之一已經完成了!您需要六個框架型組件和六個懸架型組件。
第五步:組裝底盤
此時,您應該已經有制造底盤所需要的所有零部件了,做得很棒!現在,我們可以開始組裝底盤了!有趣的是:如果您在第一次嘗試中完成了所有零部件的制作,那么您已經總共鉆孔570個了。
組裝底盤最簡單的方法是一次組裝一個懸架系統。如果您重復了三次組裝過程,那么您可以把所有零部件組裝在一起了,最后您只需把所有的框架模塊連接在一起即可。
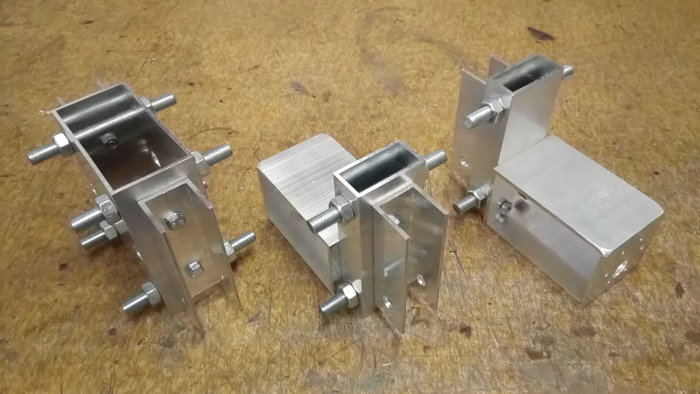
5.1首先,將減震組件用螺栓固定在懸架或框架模塊上,每個組件由兩個M5x8的螺栓連接。

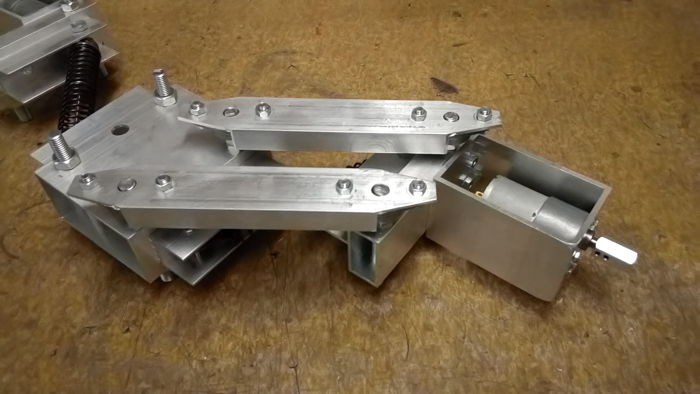
5.2下一步是連接懸架模塊和電機模塊。使用四個M5x8螺栓和4個M5螺母將它們進行連接和固定。我的建議是像圖中那樣從懸架的內部旋入螺栓。將所有的零件擰緊,并確保兩個部分對齊。
5.3現在我們需要制作一些軸承軸。從8mm的螺紋桿切下8段,每部分長80mm。用銼刀和砂紙完成切割,這樣桿的末端不會殘留碎屑。然后,將螺紋桿插進框架和懸架模塊上的8mm孔中,用M8螺母從兩側固定螺紋桿。擰緊螺母,但是不要用力過猛,不然可能會使鋁型材變形彎曲。
5.4用6個M3x8螺栓將37D電機安裝到電機模塊中。
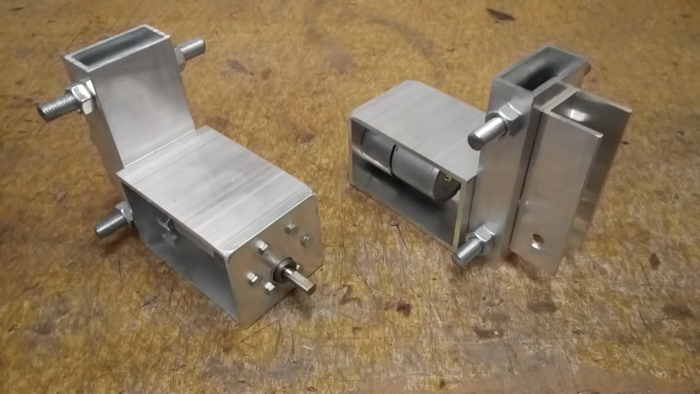
5.5下一步是將Pololu 12 mm的六角適配器安裝到電機軸上。

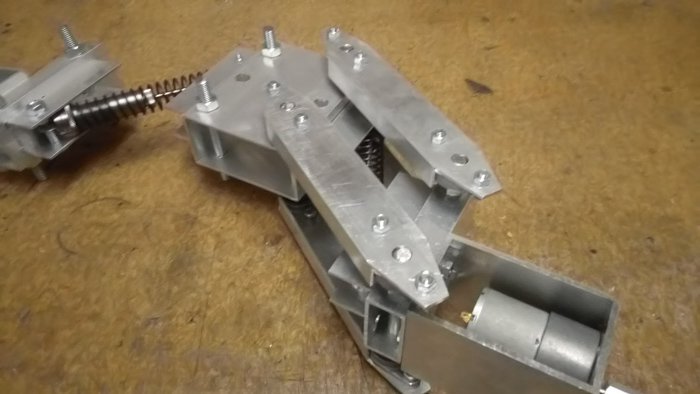
5.6現在我們要安裝減震器了。這一步通過對每個減震器使用一個M7x30螺栓(在下端)和一個M3x30螺栓(在上端)來完成。使用兩個M3螺母來將減震器固定在上端M3螺栓的中間。
5.7接下來是控制臂。將兩個KFL-08軸承分別安裝在每一個軸上。使用2個M5x12螺栓和兩個M5螺母來連接并固定軸承。

5.8下一步我們來組裝懸架。松開每個軸承上的六角螺釘,將控制臂滑至軸上。將控制臂放置在可以自由移動而又不干擾電機模塊的范圍內,然后再擰緊軸承中的六角螺釘。
5.9將另外兩個控制臂連接到另一側。像之前那樣,先松開六角螺釘,然后將控制臂滑至軸上,最后再擰緊螺釘。
5.10現在,將另外四個控制臂連接到另一個懸架模塊上。

5.11重復5.1-5.10的步驟三次,結束后您應有三對懸浮式電機。
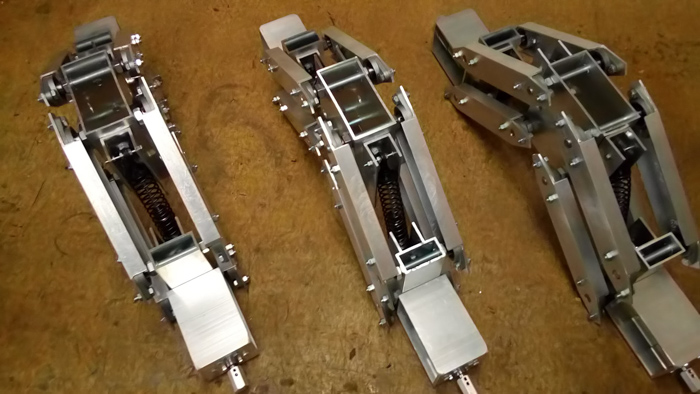
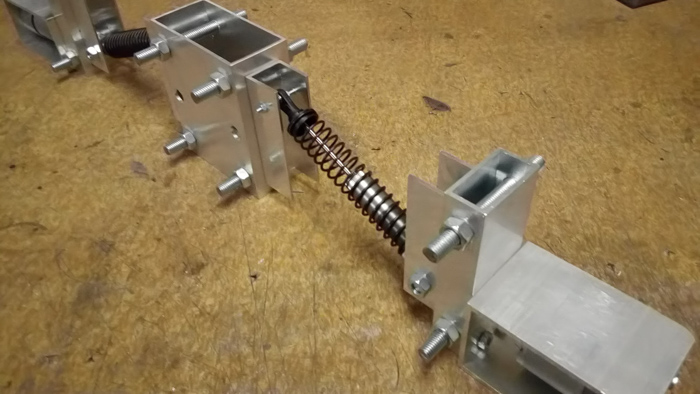
5.12接下來,從10mm的螺旋桿上切下兩段,每段500mm長。將三個懸浮式電機與10mm的螺桿連接,用一些M10螺母將框架模塊固定到位,請注意不要用力過猛,還是像之前說的那樣,這會使型材發生彎曲變形。

5.13現在,將12 mm~17 mm的六角適配器安裝到車輪上。

5.14最后一步是使用一些M4x22螺栓將車輪與電機連接。

結論
讓我們看看這個項目現在的成果!在這里,您可以看到ArduRover放置于自然環境中的一些照片。






如果您已經做到了這一步,那么恭喜您!同時非常感謝您閱讀這篇文章!這標志著ArduRover項目的第一部分已經結束了。如果您喜歡它并且決定要自己來完成項目制作,請與全世界分享您的創作吧!像往常一樣,如果您有一些覺得需要更改或想要進一步改善的建議,我的GitHub 中的Issues專欄將是您提出見解的絕佳途徑。或者,您也可以使用本文下方的評論欄與我交流討論。
現在,我們這臺令人驚奇的新型機器人只不過是一堆鋁材和鋼材,放置在車庫里,積上灰塵,毫無用處。希望在項目的下一階段,在我們加上所有可以安裝到機器上的電纜、傳感器、電子設備和電池后,情況會發生改變。敬請關注!

Jan Gromes
Jan 目前在布爾諾工業大學學習電氣工程。他有多年使用Arduino和其他微控制器來構建項目的經驗,對于機器人系統的機械設計十分感興趣。
審核編輯黃宇
-
Arduino
+關注
關注
190文章
6526瀏覽量
196940
發布評論請先 登錄
全域在環測試平臺:讓汽車底盤開發進入“零樣車”時代
智能底盤電機驅動應用方案
L3自動駕駛落地,線控底盤帶飛國產車規芯片供應鏈
探索Arduino Shield Power PROFET? + 12V:強大的高側開關評估板
探索用于Arduino的TLE94112ES直流電機控制盾牌
格陸博科技亮相蓋世汽車2025底盤大會
CW32L012小車組裝調試
破解智能底盤測試4大難題:imc提供一體化解決方案

中科創達出席中國車企歐洲市場新探索圓桌沙龍
醫療無線漫游何解?用10年時間給出“零漫游”的答案
高通展示驍龍數字底盤產品組合的最新成果
底盤制動專用芯片 射頻芯片上海車展首秀 芯旺微電子加速綜合性車規半導體布局
用 樹莓派 Zero 打造的智能漫游車!
新能源車產線必備!汽車電子組裝測試線憑啥讓產能翻倍?




 工商網監
工商網監
評論