云臺伺服驅(qū)動板的閉環(huán)控制性能直接決定穩(wěn)像精度、響應(yīng)速度與操作手感,主流采用 “電流環(huán) - 速度環(huán) - 位置環(huán)” 串級閉環(huán)架構(gòu)。本文系統(tǒng)解讀閉環(huán)控制核心參數(shù)(PID 增益、限幅、濾波、前
![的頭像]() 發(fā)表于
發(fā)表于 03-03 15:39
?150次閱讀
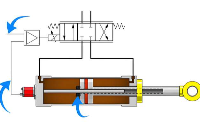
電液伺服作動器標(biāo)配磁致伸縮位移傳感器,以實(shí)現(xiàn)高精度閉環(huán)控制,具備非接觸、絕對位置反饋、抗干擾及耐惡劣環(huán)境等特性。
![的頭像]() 發(fā)表于
發(fā)表于 02-01 14:22
?450次閱讀
伺服技術(shù)作為現(xiàn)代自動化領(lǐng)域的核心技術(shù)之一,已廣泛應(yīng)用于工業(yè)控制、機(jī)器人、航空航天等高精度場景。其核心是通過閉環(huán)反饋實(shí)現(xiàn)精準(zhǔn)的位置、速度或力矩控制,本文將系統(tǒng)解析伺服系統(tǒng)的構(gòu)成、工作原理及關(guān)鍵技術(shù)
![的頭像]() 發(fā)表于
發(fā)表于 12-30 07:39
?1114次閱讀

。本文將從基礎(chǔ)原理到前沿技術(shù),系統(tǒng)梳理伺服電機(jī)的控制方式及其應(yīng)用特點(diǎn)。 一、伺服控制的基本架構(gòu) 伺服系統(tǒng)由伺服電機(jī)、驅(qū)動器、控制器和反饋裝置構(gòu)成閉環(huán)
![的頭像]() 發(fā)表于
發(fā)表于 12-01 07:37
?768次閱讀

Parker提供了多款不同的伺服電機(jī),性能各有不同,針對特定易燃易爆場所使用的防爆伺服電機(jī),與普通通用伺服電機(jī)存在諸多區(qū)別,接下來就進(jìn)一步看看Parker防爆伺服電機(jī)與普通
![的頭像]() 發(fā)表于
發(fā)表于 11-20 13:36
?412次閱讀

舵機(jī)伺服編碼器是用于實(shí)時(shí)檢測舵機(jī)輸出軸位置、速度或角度的核心反饋元件,它能將機(jī)械運(yùn)動轉(zhuǎn)化為電信號,讓控制系統(tǒng)實(shí)現(xiàn)對舵機(jī)的精準(zhǔn)閉環(huán)控制。 這個問題切得很準(zhǔn),它直接指向了舵機(jī) “精準(zhǔn)控制” 的關(guān)鍵所在
![的頭像]() 發(fā)表于
發(fā)表于 10-30 10:05
?324次閱讀
基于MT6835磁編碼器IC的步進(jìn)電機(jī)全閉環(huán)伺服控制策略,通過引入高精度位置反饋和先進(jìn)控制算法,實(shí)現(xiàn)步進(jìn)電機(jī)性能的顯著提升。
![的頭像]() 發(fā)表于
發(fā)表于 08-27 17:55
?1142次閱讀
、強(qiáng)振動、多粉塵等惡劣環(huán)境下存在明顯局限性。近年來,MT6835高速磁編碼技術(shù)的出現(xiàn),為下一代伺服電機(jī)閉環(huán)控制提供了全新的解決方案,其非接觸式測量、抗干擾能力強(qiáng)、體積小巧等優(yōu)勢,正在推動伺服控制技術(shù)邁向新的高度。
![的頭像]() 發(fā)表于
發(fā)表于 08-05 17:44
?1053次閱讀
解析。 一、核心原理與技術(shù)架構(gòu)差異 1. 控制對象本質(zhì)不同 伺服系統(tǒng)采用閉環(huán)控制,通過編碼器實(shí)時(shí)反饋電機(jī)轉(zhuǎn)速、位置等參數(shù),形成高精度閉環(huán)調(diào)節(jié)。其核心由伺服電機(jī)(通常為永磁同步電機(jī))、高
![的頭像]() 發(fā)表于
發(fā)表于 07-13 16:30
?2354次閱讀

什么是STM32 具體用于什么方面較多??
STM32與ARM有什么關(guān)系
STM32能做什么,簡單的比如調(diào)節(jié)協(xié)議,為什么那么久的產(chǎn)品到現(xiàn)在還是主流?
發(fā)表于 06-23 17:34
什么是伺服電機(jī)編碼器?
伺服電機(jī)編碼器是伺服系統(tǒng)中的核心反饋元件,用于實(shí)時(shí)檢測電機(jī)的轉(zhuǎn)速、位置、角度等參數(shù),并將信號反饋給控制器(如伺服驅(qū)動器),形成
![的頭像]() 發(fā)表于
發(fā)表于 06-09 11:07
?2768次閱讀

伺服系統(tǒng)的使用場合 伺服系統(tǒng)以其高精度、高動態(tài)響應(yīng)和閉環(huán)控制特性,廣泛應(yīng)用于需要精確運(yùn)動控制的領(lǐng)域。以下是典型應(yīng)用場景及案例說明: 1. 工業(yè)自動化與智能制造 數(shù)控機(jī)床(CNC) 場景 :金屬切削
![的頭像]() 發(fā)表于
發(fā)表于 05-26 09:26
?1156次閱讀
單片機(jī)和伺服的區(qū)別 單片機(jī)(Microcontroller)和伺服(Servo System)是兩種完全不同的技術(shù)概念,分別屬于 控制系統(tǒng)硬件 和 運(yùn)動控制執(zhí)行系統(tǒng) 。以下是它們的詳細(xì)對比和區(qū)別
![的頭像]() 發(fā)表于
發(fā)表于 05-26 09:18
?857次閱讀
開關(guān)量對傳模塊是一種用于傳輸開關(guān)信號(即“開”或“關(guān)”、“高”或“低”、“1”或“0”等二進(jìn)制狀態(tài))的專用設(shè)備或模塊,通常用于工業(yè)控制、自動化系統(tǒng)或遠(yuǎn)程監(jiān)控場景。它的核心功能是將開關(guān)量信號通過有線或無線方式從一個位置傳輸?shù)搅硪粋€位置,實(shí)現(xiàn)遠(yuǎn)程控制或狀態(tài)反饋。 主要用途 1. 遠(yuǎn)程控制 - 控制設(shè)備啟停:通過傳輸開關(guān)信號,遠(yuǎn)程控制電機(jī)、閥門、燈光、繼電器等設(shè)備的啟動或停止。 - 自動化聯(lián)動:在自動化生產(chǎn)線中,觸發(fā)其他設(shè)備
![的頭像]() 發(fā)表于
發(fā)表于 04-17 15:17
?552次閱讀
模擬量對傳模塊是一種用于連續(xù)信號傳輸?shù)脑O(shè)備,能夠?qū)⒛M量輸入(如電壓、電流、溫度、壓力等)通過有線或無線方式從一個位置傳輸?shù)搅硪粋€位置,并進(jìn)行高精度還原。與開關(guān)量(離散信號)不同,模擬量是連續(xù)變化的物理量,因此這類模塊在需要精確測量或控制的場景中至關(guān)重要。 核心功能 1.信號傳輸與轉(zhuǎn)換 -模擬信號傳輸:將傳感器輸出的模擬信號(如4-20mA、0-10V、PT100熱電阻信號等)遠(yuǎn)距離傳輸?shù)絇LC、DCS或控制器。 -信號隔離與轉(zhuǎn)換:防止干擾,實(shí)現(xiàn)
![的頭像]() 發(fā)表于
發(fā)表于 04-17 15:16
?741次閱讀
") 閉環(huán)伺服能做什么?
閉環(huán)伺服能做什么?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論