") 基于Transformer的越野場景可通行區(qū)域檢測模型OFF-Net
基于Transformer的越野場景可通行區(qū)域檢測模型OFF-Net

可通行區(qū)域檢測對于自動駕駛車輛的環(huán)境感知和路徑規(guī)劃至關(guān)重要。過去十年基于學(xué)習(xí)的可通行區(qū)域檢測算法取得了很大的成功,但是基本上都是關(guān)注城市場景的可通行區(qū)域檢測。相比于規(guī)則的城市場景道路,越野場景道路復(fù)雜多變,可通行區(qū)域檢測更加困難,另外目前缺少開源的越野場景可通行檢測數(shù)據(jù)集和算法基準。因此,本文開源第一個覆蓋多種越野場景的可通行區(qū)域檢測數(shù)據(jù)集,ORFD。ORFD采集了包括草原、林地、農(nóng)田和鄉(xiāng)村道路等不同場景道路,覆蓋晴天、雨天、霧天和雪天等不同無人車行駛天氣狀況,包含強光、日光、微光和黑暗等光照條件。ORFD一共有12198幀激光雷達點云和圖像對數(shù)據(jù),在圖像視角進行了標注,包含三種類別:可通行區(qū)域、不可通行區(qū)域和不可到達區(qū)域(如天空)。我們同時還提出了一個基于Transformer的越野場景可通行區(qū)域檢測模型OFF-Net,利用交叉注意力機制自適應(yīng)融合點云和圖像的多模態(tài)信息。數(shù)據(jù)集和基準代碼下載鏈接:https://github.com/chaytonmin/Off-Road-Freespace-Detection。
主要工作與貢獻![]()
我們開源了第一個越野場景可通行區(qū)域檢測數(shù)據(jù)集ORFD,包括草原、林地、農(nóng)田和鄉(xiāng)村道路等不同場景道路,覆蓋晴天、雨天、霧天和雪天等不同無人車行駛天氣狀況,包含強光、日光、微光和黑暗等光照條件。
我們提出了一個越野場景可通行區(qū)域檢測基準算法OFF-Net,采用Transformer結(jié)構(gòu)聚合全局信息,設(shè)計cross-attention自適應(yīng)挖掘點云和圖像的多模態(tài)信息。
我們的越野場景可通行區(qū)域檢測數(shù)據(jù)集ORFD和算法基準OFF-Net,有助于提高無人車在越野場景的自主行使能力。
算法流程![]()
城市場景道路和越野場景道路對比
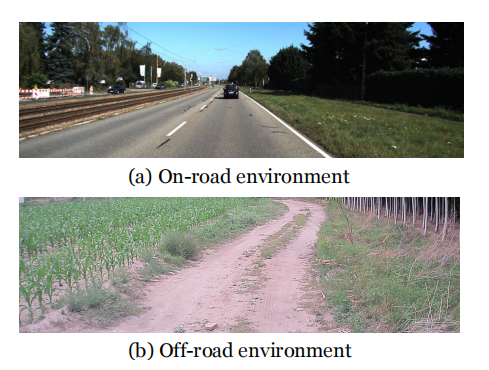
圖1 (a) 城市場景道路有清晰的道路邊界 (b)越野場景可通行區(qū)域難以準確定義。
數(shù)據(jù)采集裝置
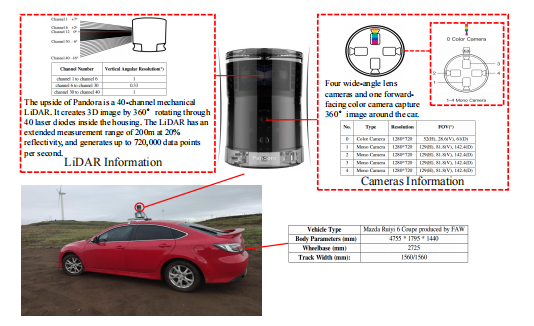
圖2 越野場景可通行區(qū)域檢測數(shù)據(jù)集ORFD采集裝置:Pandora 40線的激光雷達,相機和激光雷達一體。聯(lián)合標注激光雷達和相機。
越野場景可通行區(qū)域檢測數(shù)據(jù)集ORFD
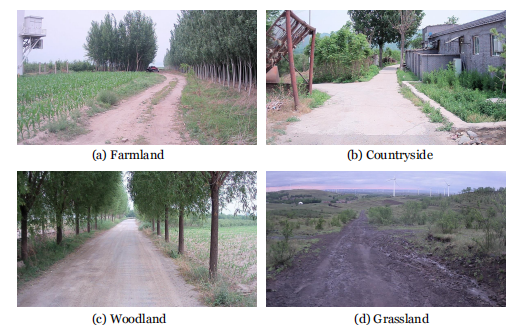

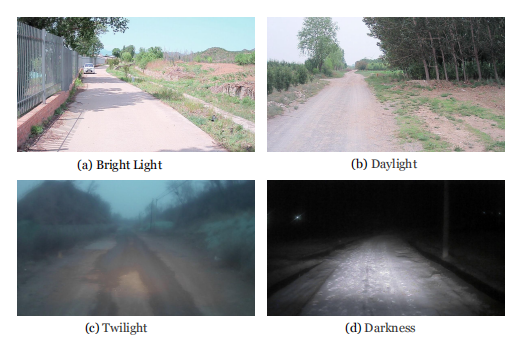
圖3 越野場景可通行區(qū)域檢測數(shù)據(jù)集ORFD,包括草原、林地、農(nóng)田和鄉(xiāng)村道路等不同場景道路,覆蓋晴天、雨天、霧天和雪天等不同無人車行駛天氣狀況,包含強光、日光、微光和黑暗等光照條件。采集了30段道路數(shù)據(jù),一共有12198幀激光雷達點云和圖像對數(shù)據(jù)。在圖像視角進行了標注,包含三種類別:可通行區(qū)域、不可通行區(qū)域和不可到達區(qū)域(如天空)。
數(shù)據(jù)集劃分

越野場景可通行區(qū)域檢測基準算法OFF-Net
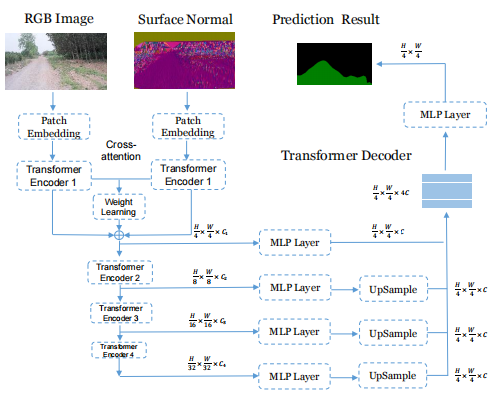
圖4 提出的越野場景可通行區(qū)域檢測基準算法OFF-Net。首先將激光雷達點云投到相機視角得到深度圖,然后計算得到法向量圖,再利用Transformer網(wǎng)絡(luò)融合法向量圖和圖像,得到道路分割結(jié)果。
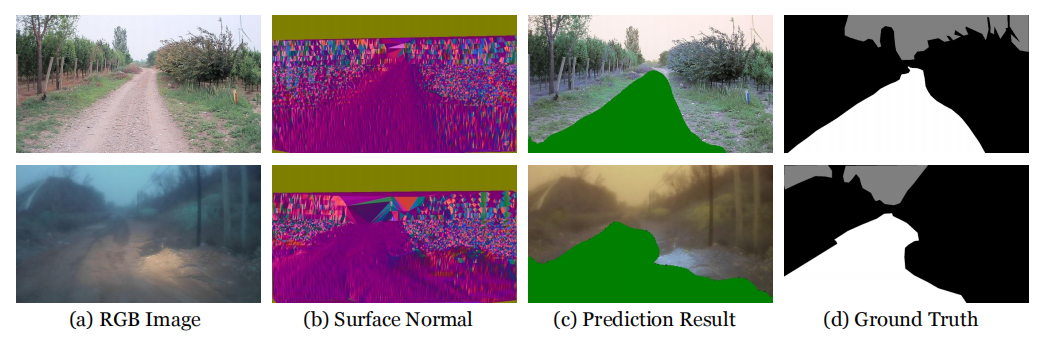
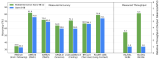
實驗結(jié)果
![]()

審核編輯:郭婷
-
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1236瀏覽量
26190 -
自動駕駛
+關(guān)注
關(guān)注
793文章
14880瀏覽量
179802
原文標題:ORFD: 第一個開源的越野環(huán)境可通行區(qū)域檢測數(shù)據(jù)集和基準
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
Transformer 入門:從零理解 AI 大模型的核心原理
Transformer如何讓自動駕駛大模型獲得思考能力?
場景向——CD7377CZ/CD7388場景適配全解析:通勤、改裝、商用各選對款
倍加福全新推出R305反射板式區(qū)域傳感器
隼眼科技亮相2025交通行業(yè)低空場景應(yīng)用技術(shù)研討會
【「AI芯片:科技探索與AGI愿景」閱讀體驗】+第二章 實現(xiàn)深度學(xué)習(xí)AI芯片的創(chuàng)新方法與架構(gòu)
NVIDIA Nemotron Nano 2推理模型發(fā)布
自動駕駛中Transformer大模型會取代深度學(xué)習(xí)嗎?

Momenta飛輪大模型賦能輔助駕駛巧避障礙物
Transformer架構(gòu)中編碼器的工作流程

Transformer架構(gòu)概述




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論