 基于FLEXMIN控制軟件開發用于微創單孔手術的遙控外科手術機器人
基于FLEXMIN控制軟件開發用于微創單孔手術的遙控外科手術機器人

作者:Christian Hatzfeld 和 Johannes Bilz
與傳統的開放手術相比,通過小切口(或稱為孔)進行的微創手術 (MIS) 可以減少組織創傷,從而幫助患者更快恢復,減少疼痛,并縮小疤痕組織。單孔手術能夠更進一步減少創傷。在單孔手術中,外科醫生將一根薄壁的管子插入一個小切口內,使用管內的腹腔鏡器械進行手術。這些手術也可以通過自然腔道(如肚臍、喉嚨或肛門)進行,根本不需要任何切口。
傳統的單孔方法并非沒有缺點。例如,它們使外科醫生不得不在狹窄的工作空間內使用會限制操作靈活性的剛性器械進行手術。這些限制會導致器械位置頻繁變動和器械相互碰撞。
為了應對這些挑戰,我們設在達姆施塔特工業大學的研究小組開發了 FLEXMIN,這是一種通過自然腔道進行單孔手術的遙控外科手術機器人。我們采用基于模型的設計方法開發了用于 FLEXMIN 的控制軟件。這種方法使我們能夠對機器人的運動學進行建模,為它的 20 個電機設計一個控制系統,并為實時目標生成控制代碼,所有這些操作都在同一個環境中完成。
1.FLEXMIN 硬件架構
FLEXMIN 系統由兩個硬件子系統組成:觸覺接口和體內機器人。實時控制系統負責解釋外科醫生在觸覺接口端所做的動作,然后將其轉化為電機指令,從而在腹腔內的機器人末端執行器(例如抓鉗、持針器或其他器械)端產生動作。
體內機器人的兩個手臂和一個內窺鏡攝像頭安放在一根直徑為 40 毫米的管子內。外科醫生可通過內窺鏡攝像頭看到每個手臂末端的末端執行器。這兩個手臂由我們在 MATLAB中設計的鉸接三腳架結構驅動。電機用于移動該運動結構中的三根平行桿,以便準確定位工具中心點 (TCP)(圖 2)。每根桿由兩個無刷直流電機驅動。一個電機用于平移運動,而另一個用于旋轉運動。12 個電機安裝在一個固定到管上的驅動裝置中,通過 EtherCAT 連接到系統的實時計算機。
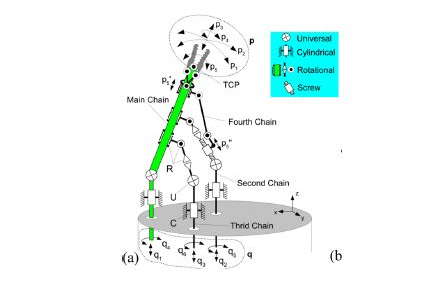
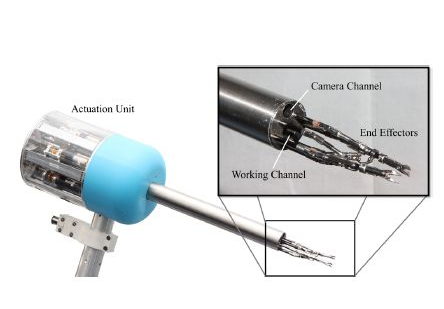
圖 2. 上:每個手臂的平行三桿結構。下:用于驅動手臂的驅動裝置。
FLEXMIN 觸覺接口由外科醫生直接操作。它的結構接近于體內機器人中使用的三腳架結構(圖 3)。抓取和軸向扭矩的力反饋由兩個無刷直流伺服電機產生,而另外三個電機提供 TCP 三維運動的觸覺反饋。受控 TCP 的坐標使用電機上的旋轉編碼器進行測量。與體內機器人的組件一樣,觸覺接口中的編碼器和電機通過 EtherCAT 網絡鏈接到實時目標計算機。
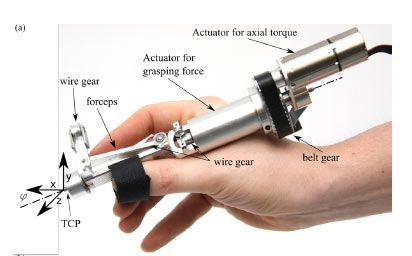
圖 3. FLEXMIN 觸覺接口。
2.設計和實現實時控制器
我們首先面臨的一個控制設計挑戰是將觸覺接口的三維運動轉化為 TCP 的相應運動。我們用兩個 MATLAB 腳本就完成了這項任務。第一個腳本使用觸覺接口中電機編碼器的數據來計算 TCP 在笛卡爾空間中的期望位置。第二個則使用 TCP 的此位置來計算手臂中三根桿的對應位置,以及設置這些位置所需的電機指令。
我們的 Simulink控制器模型包含這些 MATLAB 腳本,以及通過 EtherCAT 總線與機器人的電機和傳感器之間收發數據的 EtherCAT 模塊。該模型還包括一個使用 Stateflow建模的大型狀態圖。我們使用該狀態圖來初始化電機控制器和管理整個 FLEXMIN 系統的狀態。
為了實現觸覺反饋,我們使用驅動裝置上的六個傳感器測量機器人抓鉗處的器械與組織之間的相互作用力。在對這些傳感器測量出的數據應用帶通濾波器后,我們用它來計算作用于手臂三根桿上的力。我們還進行了額外的運動學計算,以基于桿的位置確定 TCP 所受的力。通過這些計算,我們能夠確定抓鉗受到的實際作用力,例如,外科醫生抓取組織并開始拉扯它時的作用力。我們開發了一個 Simulink 模型。該模型使用此類力測量信息來控制觸覺接口的電機,并為外科醫生提供高達 15 牛頓力的觸覺反饋,更新頻率每秒多達 40 次(圖 4)。

圖 4. 用于控制觸覺接口三個電機的 Simulink 模型。
在準備進行硬件測試時,我們使用 MATLAB Coder 和 Simulink Coder 從我們的模型中生成了 C 代碼,并使用 Simulink Real-Time 在兩臺實時 PC(每個手臂各有一臺)上運行該代碼。每臺 PC 都配備了 3 GHz Intel酷睿 2 雙核處理器。這種設置使我們能夠在實驗室里測試、調試和優化體內機器人和觸覺反饋接口的實時性能。
除了使用實驗室設置進行開發之外,我們還以獨立模式使用該設置。在這種模式下,計算機用我們軟件的最新穩定版本啟動,以便我們能夠向感興趣的研究人員演示我們的系統。這項功能很方便,讓我們能夠以最短的準備時間展示我們的工作。
3.外科實操測試和后續步驟
我們與來自蒂賓根大學附屬醫院的外科醫生和學生們進行了多項實操測試。除了基本的縫合測試外,參與者還評估了 FLEXMIN 在豬模型中進行膽囊切除術時的靈活性和可用性。參與者表示,該系統的響應能力給他們留下了深刻的印象。他們注意到,他們的手和器械同步運動,毫無遲滯。他們還表示,該系統具有直觀性,可以提供充足的空間,便于在腹腔內進行手術操作,這也讓他們大開眼界。
在 FLEXMIN 的后續版本中,我們計劃納入預編程的動作(例如,能夠讓針自動穿過兩個標記位置),以及抓取壓力的觸覺反饋。這些改進可能由我們的同事甚至是新加入小組的學生來實現。我們在研究中使用 MATLAB 和 Simulink 的一大優勢在于,團隊新成員能夠快速上手我們的項目。在達姆施塔特工業大學,幾乎所有的本科生和研究生都在他們的課程作業中用過 MATLAB 和 Simulink。此外,我們采用模塊化的建模方法,這使得小組成員可以基于各自的模塊獨立工作,然后將這些模塊組合成完整的系統。綜合考量這些因素,我們很容易進行團隊協作,甚至將項目移交給其他人。
關于作者
Christian Hatzfeld 博士負責領導達姆施塔特工業大學的觸覺系統小組。他于 2008 年獲得德國達姆施塔特工業大學精密工程文憑,并于 2013 年以一篇關于人類力量感知的論文獲得了博士學位。他的研究方向包括醫學應用中任務特定觸覺系統的設計、心理物理學以及在設計方法中對觸覺感知的系統考慮。
Johannes Bilz 是達姆施塔特工業大學微機電一體化和醫療機器人小組的助理研究員。他擁有達姆施塔特工業大學精密工程碩士學位。
審核編輯:郭婷
-
控制系統
+關注
關注
41文章
6952瀏覽量
114088 -
機器人
+關注
關注
213文章
31075瀏覽量
222199 -
電機
+關注
關注
143文章
9590瀏覽量
154079
原文標題:智慧醫療研學社 | 開發用于微創單孔手術的遙控外科手術機器人
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
谷東智能AI+AR眼鏡重塑手術遠程協作標準
物理人工智能面臨的安全風險

強生醫療科技攜手NVIDIA推進手術機器人開發
醫療術野新突破:MODBUS轉CANOPEN網關打造高性能手術機器人通信骨架

研華科技助力真健康穿刺手術機器人亮相
滾珠導軌:手術機器人與影像設備的精密支撐

基于BLDC手術刀控制系統的程序設計
【應用】PS-CZ00001 Force Sensor “硬幣”式觸力傳感器在手術機器人中的應用

手術動力裝置微電機的測功機的研究

多摩川絕對編碼器在手術機器人中亞微米級定位精度實現與抗干擾性
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
NVIDIA推出AI醫療健康機器人開發平臺




 工商網監
工商網監
評論