") 一套基于擴展卡爾曼濾波的GNSS/INS組合導航系統(tǒng)算法代碼
一套基于擴展卡爾曼濾波的GNSS/INS組合導航系統(tǒng)算法代碼

雖然GNSS/INS松組合算法已經(jīng)很成熟,但對初學者來說正確實現(xiàn)它仍是不小的挑戰(zhàn)。為此,我們開源一套基于擴展卡爾曼濾波的GNSS/INS組合導航算法代碼(KF-GINS)。代碼結合團隊已公開的視頻課程、講義,供初學者入門使用,也可作為基礎的GNSS/INS松組合算法研究平臺。
隨著自動駕駛和智能無人系統(tǒng)的發(fā)展,復雜環(huán)境下連續(xù)準確的定位定姿需求日益增加。在眾多的導航定位技術中,全球衛(wèi)星導航系統(tǒng)(GNSS)和慣性導航系統(tǒng)(INS)具有天然的互補性,因此GNSS/INS組合導航被公認為最經(jīng)典、使用最廣泛的組合導航系統(tǒng)。
GNSS/INS的數(shù)據(jù)融合算法首先通過INS機械編排實現(xiàn)導航狀態(tài)的推算,然后通過Kalman濾波將GNSS的定位和測速信息作為觀測量對INS推算的導航狀態(tài)量進行修正。GNSS/INS數(shù)據(jù)融合的Kalman濾波算法已經(jīng)很成熟,但涉及慣性導航算法、IMU誤差建模、Kalman濾波設計實現(xiàn)等多方面的知識,正確實現(xiàn)組合導航算法對初學者來說仍是不小的挑戰(zhàn)。
武漢大學i2Nav團隊開源了一套基于擴展卡爾曼濾波的GNSS/INS組合導航系統(tǒng)(EKF-Based GNSS/INSIntegrated Navigation System, KF-GINS)算法代碼。這套代碼結合團隊已公開的視頻課程、講義[1,2],供初學者入門使用,也可作為基礎的GNSS/INS松組合算法研究平臺。KF-GINS采用C++語言編寫,各功能函數(shù)和模塊相對獨立,復用性和可擴展性較強。KF-GINS已上傳到GitHub,可通過以下鏈接獲取:
KF-GINS主要特點包括:
擴展卡爾曼濾波(誤差狀態(tài)向量)架構的GNSS/INS松組合算法,包括IMU誤差補償、慣性導航解算、Kalman濾波、誤差反饋等環(huán)節(jié);
采用21維系統(tǒng)誤差狀態(tài),包括位置誤差、速度誤差、姿態(tài)誤差、IMU零偏誤差和IMU比例因子誤差;
姿態(tài)誤差采用Phi角模型,速度、位置誤差定義在導航坐標系下;
慣性導航解算采用基于角速度和加速度線性變化假設的雙子樣機械編排算法,補償了姿態(tài)圓錐效應、速度的旋轉效應和劃槳效應。
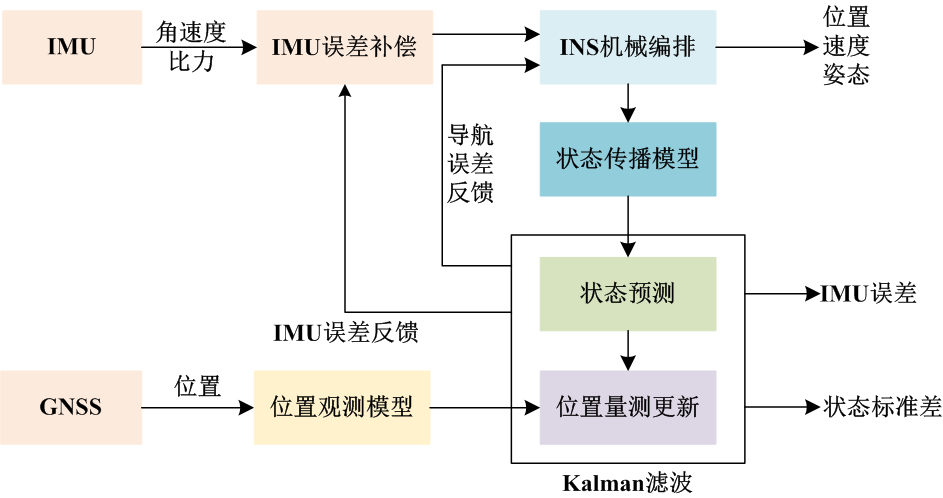
KF-GINS系統(tǒng)框架
這套代碼配套的組合導航測試數(shù)據(jù)集(包含不同精度等級IMU)可以通過如下鏈接獲取:
https://github.com/i2Nav-WHU/awesome-gins-datasets
審核編輯:劉清
-
卡爾曼濾波
+關注
關注
3文章
167瀏覽量
25435 -
GNSS
+關注
關注
9文章
990瀏覽量
51155 -
自動駕駛
+關注
關注
793文章
14883瀏覽量
179911 -
慣性導航
+關注
關注
2文章
68瀏覽量
14496
原文標題:開源代碼分享之KF-GINS:基于擴展卡爾曼濾波的GNSS/INS組合導航算法
文章出處:【微信號:SmartHWFW,微信公眾號:SmartHWFW】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
告別導航盲區(qū)!MEMS組合導航系統(tǒng),精準定位

1+1>2”的融合哲學,組合導航如何進行數(shù)據(jù)融合
ADC的采樣濾波算法利用卡爾曼濾波算法
測繪級MEMS組合導航系統(tǒng)精度對標分析
高精度高可靠!全新組合導航系統(tǒng)!
MEMS組合導航系統(tǒng)能否成為多領域導航的“全能王者”?

還在為復雜環(huán)境下的導航精度發(fā)愁?ER-GNSS/MINS-03組合導航系統(tǒng)來破局!

為什么GNSS/INS組合被譽為導航界的&quot;黃金搭檔&quot;?

這款MEMS組合導航系統(tǒng)如何做到60秒高精度導航?

GNSS信號丟失時,組合導航系統(tǒng)依然保持精準導航

組合導航系統(tǒng)中的慣性導航系統(tǒng)是什么?



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論